α − i ¨
advertisement

On αi−distance in n−dimensional space
Özcan Gelişgen and Rüstem Kaya
Abstract. In this study, we introduce the concept of αi −distance, which
is a generalization of Taxicab, Chinese Checker, and α−distances from R2
to Rn .
M.S.C. 2000: 51K05, 51K99, 54E35.
Key words: Taxicab distance, CC- distance, α−distance, non-Euclidean geometry.
H. Minkowski [8] has introduced a family of metrics including the taxicab metric
at the beginning of the last century. Later, Menger [7] developed the taxicab plane
geometry using the taxicab metric instead of the well-known Euclidean metric for the
distance between any two points in the analytical plane. E. F. Krause [6] asked the
question of how to develop a metric which would be similar to the movement made
by playing Chinese Checkers. An answer to this question was given by G. Chen[2]. S.
Tian [9] developed a family of metrics, which is a generalization of both the Taxicab
and Chinese Checker distances on the plane, and named it the α−distance. In [4]
and [5], the authors extended the concept of α−distance to three and n−dimensional
space, respectively. In this paper, we introduce the αi −distance in n−dimensional
space as a generalization of the work in [4] and [5].
The following definition introduce a family of distances in Rn , which include Taxicab, Chinese Checker and α−distances as special cases.
Definition 1 . Let P1 = (x1 , x2 , . . . , xn ) and P2 = (y1 , y2 , . . . , yn ) be two points in
Rn .
Denote
A={|x
∆1 =max A
and
1 − y1 | , |x2 − y2 | , . . . , |xn − yn |} ,
½
¾
i−1
S
∆i =max A \
∆k ,i = {2, . . . , n} . For each i = 1, 2, . . . , n, let αi ∈ [0, π/4]
k=1
and αi ≤ αi+1 . Then the function dαi : Rn × Rn → [0, ∞) αi −distance between
points P1 and P2 is defined by
dαi (P1 , P2 ) =
=
∆1 + (sec α1 − tan α1 )∆2 + · · · + (sec αn−1 − tan αn−1 )∆n
∆1 +
n−1
X
(sec αj − tan αj )∆j+1 .
j=1
Applied Sciences, Vol.10, 2008, pp.
88-94.
c Balkan Society of Geometers, Geometry Balkan Press 2008.
°
On αi −distance in n−dimensional space
89
The αi −distance in Rn generalize the Taxicab, Chinese Checker, and Alpha distances between points P1 and P2 in Rn as follows:
dT (P1 , P2 ) = ∆1 + ∆2 + · · · + ∆n
,
n
X
√
dc (P1 , P2 ) = ∆1 + ( 2 − 1)
∆i
i=2
and
dα (P1 , P2 ) = ∆1 + (sec α − tan α)
n
X
∆i ,
i=2
respectively. Notice that
1. if all of αi = 0, αi = π/4, αi = α ∈ [0, π/4] , then d0 (P1 , P2 ) = dT (P1 , P2 ),
dπ/4 (P1 , P2 ) = dc (P1 , P2 ) and dα (P1 , P2 ) = dα (P1 , P2 ).
2. if ∆2 > 0 and α > αi , then
dE (P1 , P2 ) < dc (P1 , P2 ) < dα (P1 , P2 ) < dαi (P1 , P2 ) < dT (P1 , P2 )
for all αi ∈ (0, π/4) where P1 , P2 ∈ Rn and dE stands for the Euclidean distance.
3. if ∆2 = 0, then P1 and P2 lie on a line which is parallel to one of the coordinate
axes, and
dc (P1 , P2 ) = dα (P1 , P2 ) = dαi (P1 , P2 ) = dT (P1 , P2 ) = dE (P1 , P2 )
for all αi ∈ [0, π/4] .
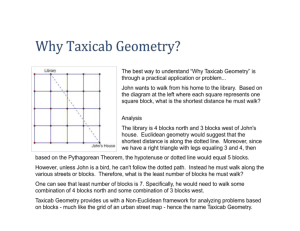
Let l be a line through P1 and parallel to the jth-coordinate axis and l1 , . . . , ln
denote lines each of which is parallel to a coordinate axis distinct from the jth-axis.
Geometrically, the shortest way of obtaining a path between the points P1 and P2
is taking the union of a line segment parallel to lj and line segments each making
αi (i = 1, . . . , n − 1) angle with one of l1 , . . . , ln , as shown in Figure 1. Thus, the
shortest distance dα from P1 to P2 is the sum of the Euclidean lengths of these n line
segments.
Figure 1
90
Özcan Gelişgen and Rüstem Kaya
The next two propositions follow directly from the definition of the αi −distance.
Proposition 1. The αi −distance is invariant under all translation in Rn . That is,
T : Rn → Rn 3 T (x1 , x2 , . . . , xn )=(x1 +a1 , x2 +a2 , . . . , xn +an ), a1 , a2 , . . . , an ∈ R
does not change the distance between two any points in Rn .
Proposition 2. Let P1 = (x1 , x2 , . . . , xn ) and P2 = (y1 , y2 , . . . , yn ) be two points in
Rn . If qj = sec αj − tan αj , j ∈ {1, 2, . . . , n − 1}, then
∆1 +
n−1
X
n−1
X
qj ∆j+1 ≥ ∆i +
j=1
q j ∆k ,
k∈K,j=1
provided that each of i, j, k appears
only once in the last sum,
where i ∈ I={1, . . . , n}, k ∈ K = I \ {i}.
Proof. Let P1 = (x1 , x2 , . . . , xn ) and P2 = (y1 , y2 , . . . , yn ). First observe that
n−1
n−1
P
P
∆1 +
qj ∆j+1 ≥ ∆i +
qj ∆k , where i ∈ I = {1, 2, . . . , n}, k ∈ K = I \ {i}
j=1
j=1
is self-evident when dimension is 1. We assume that
∆1 +
n−2
X
qj ∆j+1 ≥ ∆ip +
j=1
n−2
X
q j p ∆k p ,
j p =1
where ip ∈ I p = {1, 2, . . . , n − 1}, k p ∈ K p = I p \ {ip }. That is, we suppose that the
inequality holds when dimension is n − 1. So we have to show that the inequality
holds if the dimension is n. One can easily get
∆1 +
n−2
P
j=1
n−2
P
qj ∆j+1 ≥ ∆ip +
⇒ ∆1 +
⇒ ∆1 +
n−2
P
j=1
n−1
P
j=1
j p =1
q j p ∆k p
qj ∆j+1 + qn−1 ∆n ≥ ∆ip +
qj ∆j+1 ≥ ∆ip +
n−2
P
j p =1
n−2
P
j p =1
qj p ∆kp + qn−1 ∆n
qj p ∆kp + qn−1 ∆n ,
where k p ∈ K p = I p \ {ip }.
Therefore, using this result one can show the required inequality holds as follows:
Let j q ∈ I q = I p \ {s} , k q ∈ K q = I \ {i, m}.
∆i +
n−1
X
qj ∆k
=
∆i +
j=1
X
qj q ∆kq + qs ∆n + qn−1 ∆m
j q ∈I q
=
X
∆i +
qj q ∆kq +qs ∆n +qn-1 ∆m +qs ∆m +qn-1 ∆n − qs ∆m − qn-1 ∆n
j q ∈I q
=
∆i +
n−2
X
qj p ∆kp + qn−1 ∆n + (qs − qn−1 )(∆n − ∆m )
j p =1
≤
∆i +
n−2
X
j p =1
where k p ∈ K p = I p \ {ip }.
qj p ∆kp + qn−1 ∆n ≤ ∆1 +
n−1
X
j=1
qj ∆j+1 ,
On αi −distance in n−dimensional space
91
The following theorem shows that αi −distance is a metric.
Theorem 3. For each αi ∈ [0, π/4] , the αi -distance is a metric for Rn .
Proof. We have to show that dαi is positive definite and symmetric, and triangle
inequality holds for dαi . Let P1 = (x1 , x2 , . . . , xn ), P2 = (y1 , y2 , . . . , yn ) and P3 =
(z1 , z2 , . . . , zn ) be three points in Rn . The αi −distance between the points P1 and P2
is
dαi (P1 , P2 ) = ∆1 +
n−1
X
(sec αi − tan αi )∆i+1 , αi ≤ αi+1 , αi ∈ [0, π/4] .
i=1
Because |xi − yi | ≥ 0 for i = 1, 2, . . . , n and sec αi − tan αi ≥ 0 for each αi ∈ [0, π/4] ,
dαi (P1 , P2 ) ≥ 0. Clearly, dαi (P1 , P2 ) = 0 iff P1 = P2 . So dαi is positive definite.
Since |xi − yi | = |yi − xi | , i = 1, 2, . . . , n, obviously dαi (P1 , P2 ) = dαi (P2 , P1 ).
That is, dαi is symmetric.
Now, we shall prove that dαi (P1 , P2 ) ≤ dαi (P1 , P3 ) + dαi (P3 , P2 ) for all P1 , P2 ,
P3 ∈ Rn and αi ∈ [0, π/4].
Let xk and yk are components about ∆i+1 and k ∈ K = I\ {j} .
dαi (P1 , P2 )
=
=
∆1 +
n−1
X
n−1
X
i=1
i=1
(sec αi − tan αi )∆i+1 = |xj − yj | +
|xj − zj + zj − yj | +
(sec αi − tan αi ) |xk − yk |
n−1
X
(sec αi − tan αi ) |xk − zk + zk − yk |
i=1
≤
|xj − zj | + |zj − yj | +
n−1
X
(sec αi − tan αi )(|xk − zk | + |zk − yk |) = l .
i=1
One can easily see that dαi satisfies the triangle inequality by examining the following
cases:
Case I: If |xj − zj | ≥ |xk − zk |
and
|zj − yj | ≥ |zk − yk | ,
j 6= k = {1, 2, . . . , n} , then for each αi ≤ αi+1 , αi ∈ [0, π/4], k ∈ K, and
I = {1, 2, . . . , n} \ {j} ,
dαi (P1 , P2 ) ≤
l = |xj − zj | + |zj − yj | +
n−1
X
(sec αi − tan αi )(|xk − zk | + |zk − yk |)
i=1
=
|xj −zj | +
n−1
X
(sec αi − tan αi ) |xk −zk | + |zj − yj | +
i=1
=
n−1
X
(sec αi − tan αi ) |zk −yk |
i=1
dαi (P1 , P3 ) + dαi (P3 , P2 ).
Case II: If |xj − zj | ≥ |xk − zk |
and
|zj − yj | ≤ |zk − yk | ,
j 6= k = {1, 2, . . . , n} , then we have the following two possible situations:
(i) Let |xj − zj | + |zj − yj | ≥ |xk − zk | + |zk − yk | .
Then for each
92
Özcan Gelişgen and Rüstem Kaya
αi ∈ [0, π/4], k ∈ K, and I = {1, 2, . . . , n} \ {j} ,
dα (P1 , P2 ) ≤
l = |xj − zj | + |zj − yj | +
n−1
X
(sec αi − tan αi )(|xk − zk | + |zk − yk |)
i=1
=
|xj −zj | +
n−1
X
(sec αi − tan αi ) |xk −zk | + |zj −yj | +
i=1
=
dαi (P1 , P3 ) + |zj − yj | +
n−1
X
(sec αi − tan αi ) |zk −yk |
i=1
n−1
X
(sec αi − tan αi ) |zk − yk |
i=1
≤
dαi (P1 , P3 ) + dαi (P3 , P2 ),
where |zj −yj | +
n−1
P
i=1
(sec αi − tan αi ) |zk −yk | ≤ dαi (P3 , P2 ) because of Proposition 2.
(ii) Let |xj − zj | + |zj − yj | ≤ |xk − zk | + |zk − yk | . One can easily give a proof
for the situation (ii) as in situation (i).
Case III: If |xj − zj | ≤ |xk − zk |
and
|zj − yj | ≥ |zk − yk | ,
j 6= k = {1, 2, . . . , n} , then we have the following two possible situations:
(i) Let |xj − zj | + |zj − yj | ≥ |xk − zk | + |zk − yk | .
(ii) Let |xj − zj | + |zj − yj | ≤ |xk − zk | + |zk − yk | .
One can easily give a proof for the Case III as in the Case II.
References
[1] Z. Akca, R. Kaya, On the norm in higher dimensional taxicab spaces, Hadronic
Journal Supplement 19 (2004), 491-501.
[2] G. Chen, Lines and Circles in Taxicab Geometry, Master Thesis, Department of
Mathematics and Computer Science, Centered Missouri State University, 1992.
[3] O. Gelisgen, R. Kaya, M. Ozcan,Distance formulae in the Chinese checker space,
Int. Jour. of Pure and Appl. Math. (IJPAM) 26, 1 (2006), 35-44.
[4] O. Gelişgen, R. Kaya, On α-distance in three dimensional space, Applied Sciences, Vol. 8 (2006), 65-69.
[5] O. Gelişgen, R. Kaya, Generalization of α−distance to n−dimensional space,
Scientific and Professional Journal of the Croatian Society for Geometry and
Graphics (KoG), 10 (2006), 33-37.
[6] E.F. Krause, Taxicab Geometry, Addison - Wesley Publishing Company, Menlo
Park, CA 1975.
[7] K. Menger, You Will Like Geometry, Guildbook of the Illinois Institute of Technology Geometry Exhibit, Museum of Science and Industry, Chicago, IL, 1952.
[8] H. Minkowski, Gesammelte Abhandlungen, Chelsa Publishing Co. New York,
1967.
[9] S. Tian, Alpha distance - a generalization of Chinese checker distance and taxicab
distance, Missouri Journal of Mathematical Sciences, 17 (1) (2005), 35-40.
On αi −distance in n−dimensional space
Authors’ address:
Özcan Gelişgen and Rüstem Kaya
Department of Mathematics, Faculty of Science and Arts
University of Eskişehir Osmangazi, Eskişehir, Turkey.
E-mail: gelisgen@ogu.edu.tr, rkaya@ogu.edu.tr
93