The 2005 HST Calibration Workshop
Space Telescope Science Institute, 2005
A. M. Koekemoer, P. Goudfrooij, and L. L. Dressel, eds.
Empirical PSFs and Distortion in the WFC Camera
Jay Anderson
Rice University, Physics and Astronomy Department, MS-108, Houston, TX 77005
Abstract. This report summarizes two upcoming ISRs, one on empirical models of
the WFC PSF and the other on the distortion solution. Before we can come up with
an accurate distortion solution, we must first be able to measure accurate positions
for stars. With a good PSF model, positions for well-exposed stars can be measured
to about 0.01 pixel in a single exposure. To make the most of such accurate positions,
we need a distortion solution which is at least as accurate. Distortion in the WFC
comes from three primary sources: (1) the off-axis optics of the telescope, (2) a small
perturbation introduced by each filter, and (3) a small irregularity in the CCD with
a pattern that repeats every 68.270 columns. My solution addresses all three sources
of distortion. I will describe how to access my solution and will also give advice on
how best to use it. In addition, I will evaluate how breathing and secular variations
introduce small additional distortions.
1.
Introduction
Thanks to its excellent resolving power, HST can measure stellar positions that are about
ten times more accurate than those that can be measured from the ground. In addition,
it can do this for stars that are much fainter and in much denser fields than groundbased observatories can accurately observe. However, if we want to make full use of HST’s
astrometric potential, we need a distortion solution that is at least as accurate as the star
positions we hope to measure. Distortion solutions are also critical for applications other
than stellar astrometry. Image stacking and mosaicking, modeling of extended sources, and
source identification all require accurate distortion solutions.
2.
PSFs
Astrometry is the main driver for an accurate distortion solution. While a solution accurate to 0.05 pixel is sufficient for most applications (drizzle, etc), if we cannot remove the
distortion more accurately than we can measure the stars, then the position accuracy will
be wasted. At the same time, we cannot measure an accurate distortion solution without
accurate stellar positions. So, our first task in modeling the distortion is to measure accurate positions for stars. For this we will need to construct an accurate point-spread function
(PSF).
The material in this section comes largely from an ISR that is nearly ready for publication about empirical models of the WFC PSF. This ISR will give information on how
accurate our PSFs are, and how to download and use them.
2.1.
A word about images
Please note that in the following PSF discussion, all analysis is done on the flt images
produced by the ACS pipeline. Stars in the drz images cannot be well fit with PSF
modeling, since each star image has been resampled in a different way by the drizzling
11
c Copyright 2005 Space Telescope Science Institute. All rights reserved.
12
Anderson
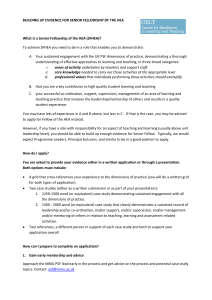
Figure 1: This shows the systematic photometric residuals that result from using a PSF
that is constant across the chip to measure fluxes for stars. We show the residuals along
three horizontal strips across the detector. The typical errors are ∼0.02 magnitude, but
they can be as large as 0.04.
process. Although the flt images are in a distorted frame, the stellar images can still be
analyzed accurately by PSF fitting.
2.2.
The need for better PSFs
In Anderson & King (2000, AK2000), we came up with a simple empirical model for the
WFPC2 PSF. This model could be used to fit stars and measure positions with a systematic
accuracy of 0.02 pixel. When we constructed a similar model for the ACS/WFC, we found
that it could measure positions even better than this.
Our initial model for the WFC was just a single PSF which did not change shape with
position on the detector (Anderson 2002). This spatially constant PSF model seemed to do
well at first, but we did notice some spatial variation in the photometry which we initially
thought was due to errors in the flat fields (see Figure 1). We later learned from Krist (2003)
that variations in chip thickness cause variations in the amount of charge diffusion across
the chip. This variation in turn perturbed the PSF, so that a single PSF model would not
be valid everywhere. The core of the PSF can change sharpness significantly over spatial
scales of 500 pixels. Photometry based on PSF fitting is particularly sensitive to the core,
and such variations in core intensity can translate into systematic errors in photometry.
Since astrometry relies on core-shape even more than photometry does, we realized
that we needed to construct more accurate PSF models. In AK2000, we constructed an
array of 3×3 fiducial PSFs to treat the variation of the PSF across each 800×800 WFPC2
chip. The Krist ISR indicates that a much more extensive array will be necessary to deal
with the spatial variations of the PSF in the WFC.
Distortion in the WFC Camera
13
Figure 2: Left: the locations in the WFC chips where our fiducial models are constructed.
Note that with models placed at the edges and corners we never have to extrapolate. Right:
the fits file that contains our 9×10 array of PSF models.
2.3.
The PSF models
We constructed an array of 9×5 fiducial PSFs to cover each chip. The fiducial PSFs are in
general separated by 512 pixels, though we did move one of the fiducial points to coincide
with a location on the chip where the thickness has an extremum (at x = 2800). Figure 2
shows the locations of the fiducial models and the array of PSFs that correspond to them.
Note that the PSF is not assumed to be continuous across the gap.
Each fiducial PSF is represented empirically by tabulating the value of the PSF at a
super-sampled (×4) array of grid points. The empirical PSFs we deal with are different
from instrumental PSFs or Tiny Tim PSFs, which may require integration over pixels or
convolution with diffusion kernels. Our “effective” PSFs include all of the pixel-integration
effects implicitly and simply tell us what fraction of light should be recorded by a pixel that
is centered at an offset (∆x, ∆y) from the center of a point source.
This model successfully represents the PSF from the core out to a radius of 12.5 pixels.
We used a large dithered data set of a moderately dense globular cluster field to construct
our PSFs, and arrived at the best model for the PSF in each region by optimizing the PSF
to fit the images of all the stars found in that region of the detector.
On the right side of Figure 2, it is clear that to first order, the PSFs look quite similar.
Figure 3 shows the average PSF for the F606W filter. On average, about 22% of a star’s
light will fall within the central pixel when the star is centered on that pixel.
In Figure 4, we subtract the average PSF from each of the fiducial models, to show how
the PSF varies across the chip. In general, it varies in two ways. We see that the intensity of
the core varies over a relatively short spatial scale, tracing the variation in charge diffusion
properties. The map of the core intensity closely resembles the maps of the flat-field’s
overall intensity, which traces chip thickness and charge diffusion. The core is sharpest
along x = 2800 where a star centered on a pixel will have 26% of its light in its central
pixel. At around (1500, 3000) the PSF suffers the most from diffusion and this fraction goes
down to below 19%. This is roughly a ±10% variation and can have a significant effect on
photometry if not included in the PSF model.
14
Anderson
Figure 3: This shows a contour plot of the average F606W PSF. The heavy contours correspond to PSF intensities of 0.1, 0.01, 0.001, and 0.0001. The lightest contours correspond
to 0.1 dex. Left: the full PSF over 8 × 8 pixels, Right: the central region. The dotted lines
have a spacing of one pixel unit.
Outside of the core, we see the effects of geometric optics gradually changing the shape
of the inner halo of the PSF (the region outside the core) from one corner of the chip to
another.
2.4.
Temporal variations of the PSF
We have found that this array of PSF models does a very good job dealing with the spatial
variations in the detector and optics for the data set for which it was constructed. In the
upcoming ISR, we will examine how stable the PSF is over time. We will show that the
PSF can change over the short term because of breathing and over the long term because
of secular focus variations.
The breathing variations can change the fraction of light in the core by about 5%:
exposures in the beginning of an orbit can have sharper or broader cores than exposures at
the end of the orbit. The longer-term focus variations can introduce a 10% variation in the
PSF over a period of months to years. These variations could introduce photometric errors
of ∼3% if not addressed.
We examine these changes in detail and find that although the fraction of light in the
core changes by quite a bit, the rest of the PSF structure is still quite similar. This is
somewhat to be expected since much of the PSF variation across the chip comes from the
diffusion characteristics of the detector, which do not change with breathing or focus. In
the PSF ISR we will present a heuristic way of dealing with the temporal variability.
2.5.
Products available soon
The upcoming ISR will explain our PSFs in more detail and will also provide links to
the empirical PSFs we have constructed for several WFC filters: F435W, F475W, F606W,
F625W, F658N, and F814W. If there exist well-dithered data sets of a relatively dense star
field through other filters, it would not be hard to expand this set to cover other filters. We
Distortion in the WFC Camera
15
Figure 4: This shows how each of the 9×10 PSFs differs from the average. Here we show
only the inner 6 pixels (in radius) of the PSF. Dark here implies more flux.
16
Anderson
Figure 5: This plot shows different kinds of data sets that can be used to probe distortion at
different scales. The idea is that the same star is observed in different places in the detector
in different exposures, allowing us to probe the distortion. The fields observed have many
thousands of stars.
have not yet compared our PSFs to the predictions of Tiny Tim models, but that would be
interesting to do.
The ISR will also provide software that uses these PSFs to measure positions and
fluxes for stars in WFC images. This routines can measure reasonably bright stars (total
fluxes over 104 e− ) with positional errors less than 0.01 pixel in each coordinate and with
photometry errors less than 0.01 magnitude. These errors represent the error in a single
exposure. By combining multiple exposures one can reduce this even more. The PSFs can
also be used for detailed analysis of resolved objects or deconvolution.
3.
The Distortion Solution
As mentioned above, astrometry is the main driver for an extremely accurate distortion
solution. But other applications will also benefit from the best possible solution: image
rectification, stacking of multiple exposures to go deep, source identification, and lensingtype analyses. These other applications may not require 0.01-pixel precision, but errors of
0.05 pixel could introduce unnecessary problems.
3.1.
The complications of self-calibration
The easiest way to calibrate the distortion in an instrument would be to compare an observation against an absolute standard field where all the star positions are known in a
calibrated frame to a high accuracy. Since no such fields exist for HST, we must rely on
self-calibration to tease out the distortion solution.
While comparison against an absolute standard can reveal distortions on all scales, selfcalibration often requires different data sets to examine different aspects of the distortion.
Figure 5 shows different kinds of data sets that can be used to solve for different aspects of
the distortion solution.
3.2.
Observing programs to pin down the solution
Soon after ACS was installed, HST calibration program 9028 imaged the center of 47 Tuc
through the F475W filter. Meurer et al. (2002) used these observations to construct the
first polynomial-based solution for the distortion. They were able to remove most of the
distortion with a fourth-order polynomial, but they did note that there were still some
higher-order systematic residuals at the 0.05-pixel level.
Distortion in the WFC Camera
17
GO program 9443 was taken three months later in order to pin down the linear terms of
the solution and to examine the solution’s behavior with wavelength. Anderson (2002) saw
the same pattern of residuals, but noticed that this pattern was different for observations
through different filters.
GO program 10424 was taken in December 2004 in order to construct empirical library
PSFs and to improve the distortion solution for the most used filters, F606W and F814W.
It turned out that the observations were taken right before the HST focus was re-adjusted,
so the data are not very useful for probing the average properties of the WFC. But the
observations can tell us what extreme conditions can do to PSFs and the distortion solution.
3.3.
The current best solution
This write-up is too short to go into how distortion solutions are constructed from the
various kinds of data sets in Figure 5. So, I will just summarize the properties of the final
solution:
• The backbone of the solution is a fourth-order polynomial. Since the x and y axes
of the WFC are off from perpendicular by 9◦ , the largest terms are linear. But there
is still considerable power in the quadratic and other high-order terms. For instance,
the amplitude of one of the quadratic terms is 35 pixels.
• In addition to the global polynomial solution, we found that each filter introduces
a perturbation on this solution. One can think of each filter having a distortion
fingerprint. The amplitude of this perturbation is typically 0.05 pixel and it is spatially
coherent over 150 pixels or so. Each filter also has a slight shift of up to 0.5 pixel and
a slightly different scale, with FOVs differing by up to 0.5 pixel.
• A final contributor to the distortion is a pattern in the detector itself. The pixels
were drawn onto the chips with a stencil that had slight irregularities in the pixel
sizes. These irregularities are less than 0.01 pixel in amplitude (typically 0.001 pixel),
but they are still worth removing. The pattern repeats every 68.270 columns, and we
provide a simple astrometric correction that removes it. The flat fields should remove
the pattern’s photometric signature.
3.4.
Accessing the solution
The distortion solution is provided in the form of a FORTRAN subroutine. It can be found
at: http://spacibm.rice.edu/~jay/WFC/FORTRAN/DISTORTION.
The routine has six arguments: the raw x and y positions, the chip number i and the
filter number k. It returns the distortion-corrected positions. The directory also contains a
routine that performs the inverse distortion correction.
If FORTRAN is not your preferred language, I have also generated some simple fits
images that can serve as a simple look-up table for the distortion correction, so that the
solution can be accessed within any programming environment. These images are not on
the website, but feel free to e-mail about them.
3.5.
Accuracy of the solution
The solution was initially constructed for the F475W filter, but other filters have been
added. The solution for F606W and F814W has recently been improved, and the solutions
for F435W, F625W, and F658N are quite good. The solutions for F555W, F850L, F775W,
F660W, F502N, and F550M are based on only a few images and are not as accurate.
The solutions for the best six filters are in general accurate to better than 0.01 pixel,
apart from breathing and other issues. Breathing affects the linear and other low-order
terms, but it does not seem to affect the filter-specific part of the distortion. The filter
fingerprint seems to be quite stable over time.
18
3.6.
Anderson
Time variation of the distortion
The distortion solution is usually constructed from a single data set at a given point in
time. Below we will look at how much the solution varies over time.
Short-term variations GO program 10424 (PI Richer) took 378 exposures of a moderately
dense field in globular cluster NGC 6397 over the period of a month. This data set is similar
to the leftmost panel of Figure 5. It cannot be used to construct the distortion solution, but
it can tell us a lot about how stable the solution is over time. To study this, we measured
all the stars in all the images and constructed an average position for each star. We then
looked at where each star fell in each image compared to the average, in order to see if there
were any astrometric variations that could be traced to the distortion solution.
The linear terms show the biggest variation. As HST moves towards or away from
the target, the FOV expands or contracts by as much as 0.05 pixel because of velocity
aberration. This can be removed using the VAFACTOR keyword in the image header. Aside
from this, the field changes by less than 0.01 pixel during the month of observations, meaning
the linear terms are stable to 5 parts in 106 !
We also looked at the quadratic terms and noticed that the solution seemed to vary by
about 0.02 pixel. These changes were correlated with changes in the focus, so it is hard to
say if the distortion solution is changing, or if the PSF is changing. At some level, this is
just a question of semantics. The good news is that the solution appears to be extremely
stable.
Long-term variations There is a field in 47 Tuc that has been observed well over 350 times
by the WFC (over 160 times through F606W), at a variety of orientations and offsets. We
gathered together all of these observations in order to study how the distortion solution
may have changed over the 3.5 years that the WFC has been on board HST.
Figure 6 shows several diagnostic quantities derived by comparing each image to all
the others. In addition to the astrometric diagnostics, in the top panel we also show how
the focus has changed over the observation period. The second panel shows the raw linear
scale of each image compared to the average. The clear annual trend results from velocity
aberration, and is proportional to the dot-product of the Earth’s motion with the direction
of 47 Tuc. The amplitude for this effect is about 0.12 pixel.
If we remove the expected trend (using the VAFACTOR keyword), we see in the middle
panel that there is still some unexplained variation of about 0.03 pixel in the FOV radius.
We see the same irregular 0.03 pixel variation in the on-axis linear skew (which corresponds
to an expansion along the x axis at the expense of the y axis).
The bottom panel shows the off-axis skew, which corresponds to a linear shear. This
quantity exhibits a clear secular trend, with a slope of about 0.03 pixel per year. Over the
lifetime of the WFC, this term has changed by over 0.1 pixel. Since the original solution
was constructed from data taken in mid 2002, this off-axis linear term of the solution is
currently in error by about 0.1 pixel. This was found to be a problem in the construction
of the UDF a year ago. In my upcoming ISR on the distortion solution, we will provide a
correction to the solution for this.
Stability with focus The observations in GO program 10252 were taken of a dense field
in Omega Cen in order to pin down the distortion solution for F814W and F606W. As it
happened, the detector was very much out of focus at the time and the observations were
not good for the intended purpose. But they are still useful for showing us what kind of
errors we should expect in conditions of extreme focus.
We will show in the upcoming ISR that the solution is largely the same, but there are
some low-spatial-frequency errors of 0.01 pixel which can reach 0.02 pixel at the edge of
the chip. As we saw above, this variation could easily be related to variations in the PSF,
which we would expect when the focus changes.
Distortion in the WFC Camera
19
Figure 6: This plot shows how terms in the astrometric solution have changed over the 3.5
years that the WFC has been on board HST. The top plot shows the focus (in terms of the
intensity of light in the core). The second plot shows the total variation of the plate scale
over time (in terms of expansion of the FOV). The middle plot shows the same variation,
with the VAFACTOR contribution removed. The fourth plot shows the on-axis linear skew,
and the bottom plot shows the off-axis linear skew.
20
Anderson
Again, the good news is that the distortion solution does not appear to change very
much at all. It seems to be globally stable to better than 0.02 pixel, if you allow for some
variation of the linear terms.
3.7.
Using the distortion correction
The distortion correction presented here is available at the website given in §3.4 in the form
of a FORTRAN program. It has been included in the drizzle stage of the ACS pipeline for
quite some time now.
Astrometry is the main application that will require users to implement the distortion
correction themselves. Measuring positions in the drz images will typically result in errors
of ∼0.05 pixel, on account of the resampling that has been done to the stellar images. Using
a good PSF on the flt images can yield systematically accurate positions to better than
0.01 pixel. The only complication is that the positions have to be corrected for distortion.
The upcoming PSF ISR will provide our empirical PSFs and a program to measure flt
images with them. The program will even perform the distortion correction.
When doing astrometry with the WFC it is important to keep in mind the limitations of
the distortion correction. As we have shown, the distortion correction for the well calibrated
filters is globally accurate to better than 0.02 pixels, if allowance is made for variation of
the linear terms. We recommend using 6-parameter linear transformations when comparing
positions in one distortion-corrected frame with those in another. This should only be a
hardship for programs with fewer than 3 reference stars.
Even though the global solution appears to be good to 0.02 pixel, it is often still preferable to perform astrometric measurements as locally as possible. The largest systematic
errors will result when comparing the position of a star in one corner of a chip with that
of a star in another corner. If you can keep your differential astrometric measurements
more local (say, over 200 pixels or so), then any systematic errors in the solution will be
minimized.
The upcoming ISR on distortion will go into more depth on the stability of the solution.
It will also recommend observation strategies for programs with various astrometric goals.
References
Anderson, J., & King, I. R., 2000, PASP, 112, 1360
Anderson, J., 2003, in Proc. 2002 HST Calibration Workshop, ed. S. Arribas, A. Koekemoer,
& B. Whitmore (Baltimore: STScI), p. 13
Anderson, J., & King, I. R., 2003, PASP, 115, 113
Anderson, J., & King, I. R., 2004, Instrument Science Report ACS 2004-15 (Baltimore:
STScI), available through http://www.stsci.edu/hst/acs
Krist, J., 2002, Instrument Science Report ACS 2002-06 (Baltimore: STScI)
Meurer, G., Lindler, D., Blakeslee, J. P., Cox, C., Martel, A. R., Tran, H. D., Bouwens,
R. J., Ford, H. C., Clampin, M., Hartig, G. F., Sirianni, M., & De Marchi, G.,
2003, in Proc. 2002 HST Calibration Workshop, ed. S. Arribas, A. Koekemoer, & B.
Whitmore (Baltimore: STScI), p. 65