Wind-Induced Dynamic Responses of Structures with Outrigger Systems
by
Xiaoxiao Wu
B.Eng. Civil Engineering
Tongji University, 2014
SUBMITTED TO THE DEPARTMENT OF CIVIL AND ENVIRONMENTAL ENGINEERING IN PARTIAL
FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF ENGINEERING IN CIVIL AND ENVIRONMENTAL ENGINEERING
AT THE
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
ARCHNES
MASSACHUJSETTS INSTITt.JTE
JUNE 2015
OF
TECHNOLOLGY
@2015 Xiaoxiao Wu. All rights reserved.
JUL 02 2015
The author hereby grants to MIT permission to reproduce
LIBRARIES
and to distribute publicly paper and electronic
copies of this thesis document in whole or in part
in any medium now known or hereafter created.
Signature redacted
Signature of Author:
Department of Civil and Environmental Engineering
May 18, 2015
Signature redacted
Certified by:
PEi'rre Ghisbain
Lecturer of Civil and Environmental Engineering
Thesis Supervisor
1*
Signature redacted
Accepted by:
Heidi M. Nep/
Donald and Martha Harleman Professor of Civil and Environmental Engineering
Chairman, Departmental Committee for Graduate Students
Wind-Induced Dynamic Responses of Structures with Outrigger Systems
by
Xiaoxiao Wu
Submitted to the Department of Civil and Environmental Engineering
on May 18, 2015 in Partial Fulfillment of the
Requirements for the Degree of Master of Engineering in
Civil and Environmental Engineering
ABSTRACT
A multi-degree of freedom lumped mass model with rotational springs was built to investigate the
influence of outrigger system on the natural periods and mode shapes of a structure. The presence of
outrigger system was found to significantly stiffen the structure, reducing the natural periods and
distorting the mode shapes. The influences of outrigger system on the modal properties of a structure
vary with the change of its number, locations and rotational stiffness.
Wind-induced along-wind and across-wind responses of structures with and without outrigger system
were analyzed, compared and discussed. It was found that the outrigger system can effectively decrease
the along-wind responses (peak displacements and accelerations) and its influence is the most significant
when it's located at the middle of the structural height. For across-wind responses, the outrigger system(s)
could help with the prevention of vortex-induced resonance, if its location(s) is(are) appropriately chosen,
by shifting the natural periods of the original structure without outrigger away from the frequency of
vortex shedding.
Two methodologies were proposed for the design of outrigger systems in two different scenarios, one
with the number and locations of outrigger(s) preset and the other not. For the first scenario, the
corresponding methodology is a checking process and for the second, it is a designing process. Both
methodologies are aimed at preventing vortex-induced resonance and minimizing along-wind peak
displacements and accelerations, satisfying related human comfort criteria for motions and lateral drifts
requirements.
Thesis Supervisor: Pierre Ghisbain
Title: Lecturer of Civil and Environmental Engineering
2
Acknowledgements
I would like to thank my father for his patience, support and guidance throughout my life. I couldn't
achieve my dream of studying at MIT without his tremendous help.
I would like to thank my mother for her mentoring and always granting me her love.
I would like to thank Helen for her care and love. Thank you for visiting and being here with me for my
first New Year's Eve abroad, despite the severe winter in Cambridge.
I would like to thank Professor Jerome Connor and Dr. Pierre Ghisbain for their help in my writing this
thesis and my entire study at MIT. Thank you for enriching my knowledge and improving my expertise.
I would like to thank Professor John Ochsendorf, my academic advisor and also my house master, for his
help and support in not only my academic study but also my life on campus.
I would like to thank Ming for his love and company during my hardest time at MIT.
I would like to thank my most important friend in life, Yi Tao, for her understanding and continuous
support. Thank you for always listening to me and being there for me.
I would like to thank all my MEng classmates. Thank you for enjoying, sharing and "struggling" through
the program with me. You are a group of the most excellent people I have ever met.
3
Contents
Table of Figures.............................................................................................................................................
6
List of Tables .................................................................................................................................................
7
Chapter 1 Introduction .................................................................................................................................
8
Chapter 2 Outrigge r System s ........................................................................................................................
9
2.1 M echanism s of W orking .....................................................................................................................
9
2.2 Benefits and Challenges of Outrigger System s ..............................................................................
10
2.3 Appropriate Conditions for Outrigger System s ...........................................................................
10
2.4 Conditions Less Suitable for Outrigger System s ............................................................................
11
2.5 Statics of Outrigger System s .............................................................................................................
12
2.5.1 Load Transfer Paths in Outrigger System s ..............................................................................
12
2.5.2 Restraining M om ents and Drift Reductions..........................................................................
12
Chapter 3 W ind Loading .............................................................................................................................
15
3.1 W ind Loading ....................................................................................................................................
15
3.2 Vortex Shedding................................................................................................................................16
3.3 W ind Speed .......................................................................................................................................
16
3.4 Calculations of W ind Loads in Along-w ind Direction ...................................................................
17
3.4.1 Gust Effect Factor.......................................................................................................................19
Chapter 4 Dynam ic Responses of Structures with Outrigger System s ...................................................
22
4.1 Dynam ic Along-w ind Responses ...................................................................................................
22
4.2 Dynam ic Across-w ind Responses...................................................................................................
23
Chapter 5 M odal Analyses of Structures w ith Outrigger System s.......................................................... 25
5.1 Analysis M odel ..................................................................................................................................
25
5.1.1 Racking Stiffness ........................................................................................................................
26
5.2 Equation of M otion ...........................................................................................................................
28
4
5 .3 M o d al Param ete rs ............................................................................................................................
5.3.1 Natural Periods and Mode Shapes..........................................................................................
29
29
5.3.2 Modal Mass, Damping, Stiffness and Force............................................................................29
5.4 Implementation of Modal Analysis in Matlab .............................................................................
29
5.4.1 Formation of Overall Stiffness Matrix K................................................................................
30
Chapter 6 Influence of Outrigger Systems on Modal Properties............................................................
33
6.1 Influence of Different Locations of Outriggers in Elevation .........................................................
33
6.1.1 Influence on Natural Periods ..................................................................................................
34
6.1.2 Influence on Fundamental Mode Shape................................................................................
36
6.2 Influence of Rotational Stiffness and Number of Outrigger Systems ..........................................
38
Chapter 7 W ind-induced Displacements and Accelerations...................................................................
40
7.1 Along-wind Responses of Structures with Single Outrigger System.............................................
40
7.1.1 Along-wind Displacements ....................................................................................................
40
7.1.2 Along-wind Accelerations ......................................................................................................
42
7.2 Along-wind Responses of Structures with Multi-Outrigger Systems............................................. 44
7.3 Discussions about the Calculation of Along-wind Responses........................................................45
7.4 Across-wind Responses.....................................................................................................................
47
Chapter 8 Motion Based Design Methodology of Outrigger Systems...................................................
49
8.1 Human Comfort Criteria for Motions (Accelerations) and Lateral Drift Restraints...................... 49
8.2 Scenario One - Number and Locations of Outriggers Preset ........................................................
49
8.3 Scenario Two - Number and Locations of Outriggers Not Preset .................................................
51
Chapter 9 Future Research .........................................................................................................................
52
Chapter 10 Conclusions ..............................................................................................................................
53
R efe re n ce s ..................................................................................................................................................
55
Appendix A Matlab Code for Modal Analysis .........................................................................................
56
5
Table of Figures
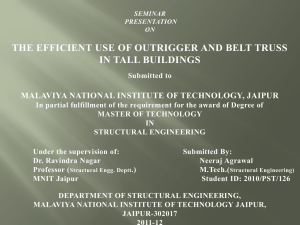
Figure 1 A typical outrigger system formed by a truss outrigger on a truss core and its deformed shape .9
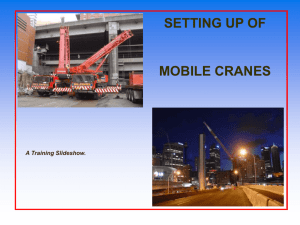
Figure 2 Interaction between Core and Outrigger Systems (choi et al., 2012) .....................................
10
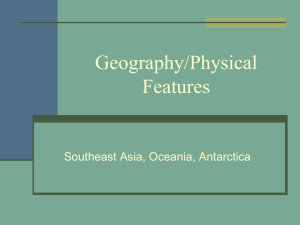
Figure 3 Outrigger Trusses in 300 North Lasalle ....................................................................................
11
Figure 4 (a) A structure with single outrigger system; (b) Deflection diagram of the core with and without
outrigger system; (c) Restraining moment diagram induced by outrigger system; (d) Resultant bending
m o m ent diagram fo r co re;..........................................................................................................................13
Figure 5 Param eters used in the calculations of M 1 .............................................................................
14
Figure 6 Along-wind loading, across-wind loading and torsional moment ............................................
15
Figure 7 the formation of vortices when originally wind streamlines are displaced ..............................
15
Figure 8 V o rtex shedding ............................................................................................................................
16
Figure 9 Table 26.9-1 in ASCE 7-10 .............................................................................................................
21
Figure 10 Plot of H2 versus p and
(Connor and Laflamme, 2014) .....................................................
24
Figure 11 The analysis model of a discretized beam with springs (in this case, suppose there's only one
o utrigge r at the top ) ...................................................................................................................................
25
Figure 12 Different Truss Types for Outriggers.......................................................................................
27
Figure 13 A uniform beam elem ent............................................................................................................
30
Figure 14 Structure consists of multiple uniform beam elements .........................................................
31
Figure 15 Plot of outrigger locations in elevation and natural frequencies ..........................................
34
Figure 16 Fundamental and second mode shape of analysis model without outrigger ........................
36
Figure 17 Fundamental mode shapes with and without outrigger .......................................................
37
Figure 18 Plot of rotational stiffness of outrigger system and fundamental period ..............................
38
Figure 19 Peak along-wind displacements of models with and without outrigger ...............................
42
Figure 20 Peak along-wind accelerations of models with and without outrigger .................................
43
Figure 21 Peak along-wind displacements of models with different number of outriggers ...................
44
Figure 22 Approximations of actual mode shapes and variance between actual and approximated mode
sh ap es .........................................................................................................................................................
46
Figure 23 Strouhal number values for different rectangular shapes (Bjornland, 2013)......................... 48
Figure 24 Proposed process for checking outrigger system design in scenario one ..............................
50
Figure 25 Proposed process for optimizing outrigger system design in scenario two ..........................
51
6
List of Tables
Table 1 Basic param eters of analysis m odel...........................................................................................
33
Table 2 Comparisons of fundamental periods with and without outrigger ............................................
34
Table 3 Comparisons of second modal periods with and without outrigger .........................................
35
Table 4 Comparisons of the mode shapes of model with and without outrigger .................................
37
Table 5 Number of outriggers and fundamental periods .......................................................................
39
Table 6 Invariant parameters selected for peak along-wind displacements calculations......................41
Table 7 Displacement calculation related results for different outrigger locations...............................41
Table 8 Acceleration calculation related results for different outrigger locations.................................43
Table 9 Displacement calculation related results for different number of outriggers.......................... 44
Table 10 Human comfort criteria under wind-induced building motions (10-year wind) .....................
49
7
Chapter 1 Introduction
The development of tall buildings has roared over the past two decades. According to the report of CTBUH
(Council on Tall Buildings and Urban Habitat), in 2014, an all-time record 97 buildings of 200 meters or
higher were completed.
Structural innovations together with lightweight construction have reduced the mass, stiffness and
damping characteristics of modern buildings. Many structural performance issues emerge as a result. One
of the most crucial issues is their performance under lateral loads, especially the dynamic wind loads. The
lateral drifts and accelerations of tall buildings need to be effectively controlled in order to satisfy
serviceability requirements and human comforts constraints. One of the most popular solutions to the
issue adopted by current tall building designs is the application of outrigger systems.
The effectiveness of outrigger system in controlling the structural responses to wind loads has been proven,
and its static behavior under wind loads has been studied extensively. For example, Smith and Salim (1983)
summarized the formulae for optimum drift resistance of outrigger braced tall building structures,
followed by Lame (2008) proposing optimization methodology of outrigger structures through applying
the formulae. However, the dynamic responses of outrigger system under wind loads are in need of deeper
understanding and further discussions.
The outrigger system design methodology is a heated topic in the structural engineering field. However,
most of the optimization methodologies presented before are primarily based on the statically calculated
lateral drifts. How to design the outrigger system from a dynamic perspective, or to be more specific,
dynamic displacement and acceleration control, is a question needs to be answered.
The organization of this thesis is as follows. First introductions to outrigger systems and wind effects on
structures are presented. Then analysis model used in the thesis is clarified and modal analyses of the
model are performed. Influence of outrigger systems on the natural periods and mode shapes of the
structures is discussed. Next, wind-induced responses of outrigger-braced structures are calculated and
analyzed, with discussions about the influence of the number and locations of outrigger systems on the
responses. Finally, methodologies are proposed for the design of outrigger systems in two different
scenarios. Recommendations for future research are also added.
8
Chapter 2 Outrigger Systems
2.1 Mechanisms of Working
Outriggers are rigid horizontal structures designed to improve building overturning stiffness and strength
by connecting the building core or spine to exterior columns. An outrigger-braced core-to-column system
is formed by connecting the core and the outside columns with very stiff beams. The core could be truss
or concrete; outriggers could be truss, mega bracing or girders. The placement of outriggers could be
symmetrical or asymmetrical. A typical outrigger system formed by a truss outrigger on a truss core and
its deformed shape are shown in Figure 1.
The principle of building outrigger behavior is not hard to understand, Outriggers act as stiff arms engaging
the exterior columns to work together with the central core. When the core tends to rotate, the outriggers
induce a tension-compression couple in the exterior columns, generating bending moments resisting the
rotation. Figure 2 shows the interaction between core and outrigger systems, and the changes of moment
diagram at the outrigger locations. In this way not only the lateral movements of the structure is
restrained, but also the overturning moment at the base is reduced.
H
Figure1 A typical outriggersystem formed by
a
truss outriggeron a truss core and its deformed shape
9
Moment incore with
\
Leeward columns In
compression
outrigger bracing
Ma...Momnt ini core witout
outrigger bracing
Windward columns
in tension
Figure 2 Interaction between Core and Outrigger Systems (choi et al., 2012)
2.2 Benefits and Challenges of Outrigger Systems
The benefits of outrigger systems could be summarized as follows.
"
Decreasing the overturning moment at the base; reducing the cost of columns and foundations.
*
Decreasing the lateral drifts; improving the serviceability and safety performance of structure.
"
Satisfying aesthetic and functional considerations by flexible placement options.
"
Eliminating moment connections in the exterior frames; reducing cost.
"
Reducing differential vertical shortening between columns, or between a column and the core.
Still, there're two major challenges for the design of outrigger systems. First, the outriggers require large
space. Because the outrigger systems include elements in vertical planes (walls or truss diagonals), they
can potentially interfere with occupiable space. However, this issue could be diminished through
architectural and structural planning in advance. Secondly, the construction of outrigger systems would
cause complications. The erections of special members and changes from typical floor framing at outrigger
levels could significantly slow down the construction process. However, this impact could be minimized
by developing optimized erection schedules (Ali & Kyoung, 2007).
2.3 Appropriate Conditions for Outrigger Systems
The outrigger system is generally applied to core-frame and tube-in-tube structures, for which bending
deformation is dominant. For an aspect ratio exceeding eight or so, the capacity of a structural core to
control lateral drift and resist overturning is seriously undermined and the use of outriggers becomes
10
important (Choi et al., 2012). With the increase of aspect ratio, the number of outriggers applied will
increase. Figure 3 shows parts of the outrigger trusses applied in the 300 North LaSalle located in Chicago.
Figure 3 Outrigger Trusses in 300 North Lasalle
2.4 Conditions Less Suitable for Outrigger Systems
There are some situations that the applications of outrigger systems in the structures are less favorable,
for which the design and analysis of outrigger systems require special considerations.
"
Shear deformations are dominant. The outrigger systems benefit the structure primarily by restraining
its bending deformation. If the structure is governed by shear deformations, generally speaking it
couldn't benefit sufficiently from outrigger systems to justify the relevant costs.
-
Asymmetric outrigger planning. Outriggers are most effective when symmetrically distributed about a
central core, providing the largest force couple between two outrigger columns. If asymmetrically
distributed (e.g. if there are only outriggers on one side of the structure), the outrigger systems may
introduce additional axial force in the core and/or lead to lateral deformations under gravity loads,
which are both unfavorable situations. However, this situation can be addressed by special concerns
in design.
"
Torsional concerns are of primary importance. Conventional outrigger systems are not able to provide
much help in controlling torsional deformations of the structures. In this case, a perimeter tube or belt
truss systems would be more effective.
11
2.5 Statics of Outrigger Systems
2.5.1 Load Transfer Paths in Outrigger Systems
When a structure with outrigger systems is under lateral loads, the core rotates. Resultantly the stiff
outrigger arms restrains the rotation by engaging exterior columns to push and pull in opposition. The
primary load transfer path in outrigger-braced structures under lateral loads is summarized as: External
lateral loads -> Bending moments in core
-
-
Shear force in Outriggers -
Compression/tension in columns
Foundations.
2.5.2 Restraining Moments and Drift Reductions
The analysis of the restraining bending moments provided by outrigger systems and the corresponding
drift reductions at the top of structures under uniform lateral loading were performed (Smith & Salim,
1983; Lame, 2008). The calculations were based on the compatibility of the core and outriggers at the
outrigger levels.
The assumptions for the calculations are:
"
The structure behaves linear elastically.
=
Axial forces only are induced in the columns.
"
The outriggers are rigidly attached to the core and the core is rigidly attached to the base.
"
The sectional properties of the core, columns and outrigger do not change through the height of the
structure.
"
The distribution of wind loading is uniform over the height.
=
The stiffness provided by the typical floor slab connecting the core and the exterior columns is
neglected.
For structures with single outrigger system, the calculation model is shown in Figure 4(a).
12
W
X1
map
Free
-
standing core
Free standing core
.00
-W
F
F1
H
W
M
OutrMgger braced core
2
I.
Outrggv brocod
M =
Deflection
M
-i-- M
M
d
(b)
(a)
(c)
(d)
Figure 4 (a) A structure with single outrigger system; (b) Deflection diagram of the core with and without outrigger system; (c)
Restraining moment diagram induced by outrigger system; (d) Resultant bending moment diagram for core;
The restraining moment M1 is
)
3
w(H
w(H3 -1_ X3
6E I[S1 + S(H - X1 ]
The reduction in drift at the top A is
A=
2
2E1
(2)
(H2 - X)
Where w is the intensity of the uniformly distributed horizontal loading; H is the height of the structure;
X 1 is the distance of the outrigger from the top.
2
S=
(3)
2
+
1
S =El
d (EA)c
d
(4)
12(EI)o
Where EI is the flexural rigidity of the core; (EA)c is the axial rigidity of the columns; (EI)O is the flexural
rigidity of the outrigger; (El')O is the actual flexural rigidity of the outrigger.
(EI)O = (+
(E')
(5)
Notes for Equation (1) to (5):
*
The meaning of (EI)O and (EI')O are indicated in Figure 5.
*
The parameters a and b are shown in Figure 5.
13
Outrigger
Core
Ict'ol
0
i
Outrigger effective
inertia i.
i
Column
u
a+ b
b
d 2
Figure5 Parametersused in the calculationsof M1
Similarly, the deflection and bending moment diagram of a typical multi-outrigger-braced structure under
uniform loading are shown in Figure 2 (Section 2.1). For a structure with n outriggers, the restraining
moments Mi can be calculated through the following matrix Equation (3).
-Mn-
-Xj)
S(H - Xn)
)
)
-SH
S(H - X)
S(H - Xi)
S(H - X 2
S1+ S(X - X 2
S(H - X7)
S(H - Xn)
)
M2
-S + S(X - X1
S(H- X 2
)
Mi.
S(H
S1 +S(X - Xj)
X)
SH
S(H -Xn)
S(H - Xn)
Xn)
S1 + S(X - Xn)-
H 3 - X-
H 3 -X3
H3
-H3
3
(6)
-H'3
The drift reduction at the top of the structure A is
n
2EII
S=1(H2-X)
(7)
i=1
The resultant moments in the core is thus calculated by Equation (5).
WX
Mcore =
-
2
k
-
Mi
(8)
i=1
Where x is the distance from the ground; k is the number of outriggers in total from the top of the
structure to the calculation location.
14
Chapter 3 Wind Loading
3.1 Wind Loading
Wind is air in motion. "Obstacles in the path of wind deflect or stop wind, converting the wind's kinetic
energy into potential energy of pressure, thus creating wind load" (Taranath, 2011). For tall buildings,
generally speaking, the uplifting force is of less significance. Therefore for structural analysis of tall
buildings, wind loading is divided into two kinds: along-wind loading and across-wind loading. Because of
the uneven distribution of wind pressure on the building surface, there's usually resultant torsional
moment induced by the wind loading on the structure too (Figure 6).
B
D
along-wind
H
-- torsion
across-wind
Figure 6 Along-wind loading, across-wind loading and torsional moment
The along-wind loading is used to refer to drag forces in the wind-blowing direction. The across-wind
loading is used to indicate the impulses applied on the structure perpendicular to the wind-blowing
direction when vortices breaking away from the surface of a building. The vortices are formed when the
originally parallel wind streamlines are displaced on either side of a building (Figure 7). This phenomenon
is referred to as vortex shedding (illustrated in detail in section 3.2).
Vortices
Wind
Figure 7 the formation of vortices when originally wind streamlines are displaced
15
3.2 Vortex Shedding
In fluid dynamics, vortex shedding is an oscillating flow that takes place when a fluid such as air or water
flows past a bluff body at certain velocities, depending on the size and shape of the body. In this flow,
vortices are created at the back of the body and detach periodically from either side of the body (Figure
8).
Movement
Wind
Movement
Figure 8 Vortex shedding
A simple formula to calculate the frequency of the transverse impulses caused by vortex shedding is:
VS
f = D
(9)
Where f is the frequency of vortex shedding; V is the mean wind speed at the top of the building; S is the
dimensionless Strouhal Number for the building shape; D is the diameter of the building.
The Strouhal Number is not a constant number, which depends on the building shape and the Reynolds
Number (Choi, 2000). Typically for a smooth cylinder, at low wind speed, S is low and increases with the
speed up to a limit of 0.2. This limit is reached for a velocity of about 50mph (22.4m/s) and remains almost
constant at 0.20 for wind speed between 50 and 115mph (22.2 and 51m/s) (Taranath, 2011). The value of
S for different shapes is usually determined in wind-tunnel tests.
3.3 Wind Speed
Due to the turbulent characteristic of wind, the wind speed V(z, t) at height z is generally regarded to
consist of two parts: the Mean Wind Speed 9(z) (static component) and the Turbulence v(z, t)
(fluctuating component) (Mendis et al. 2007), as shown in Equation (1). The turbulence of wind speed is
also technically referred to as Buffeting.
V (z, t) =
(z) + v(z, t)
(10)
16
Mean Wind Speed is the average wind speed at certain height over a time period of 10 minutes or more.
Height and surface roughness of the ground are the two major factors affecting Mean Wind Speed. The
value of Mean Wind Speed increases with the increase of height. The roughness of the earth's surface due
to friction causes drag on wind flow. Its influence gradually decreases with the increase of height, and at
gradient level (1000-2000ft) this frictional drag effect becomes negligible. The height at which the
frictional drag disappears is referred to as Gradient Height. The corresponding Mean Wind Speed is
Gradient Speed. The region from ground to the Gradient Height through which the wind speed is affected
by topography (or roughness of the surface) is called the Atmospheric Boundary Layer.
3.4 Calculations of Wind Loads in Along-wind Direction
The calculations of wind loads in along-wind direction introduced in this section are based on ASCE 7-10.
The full title of ASCE 7-10 (ASCE, 2010) is American Society of Civil Engineers Minimum Design Loads for
Buildings and Other Structures. In the provisions for wind loads (Page 241-309), ASCE 7-10 gives four
procedures for calculating wind loads for the design of buildings main wind-force-resisting systems
(MWFRS). Each of them is briefly illustrated as follows:
"
Directional Procedure for buildings of all heights. The conditions required for the buildings are: (1) the
building is a regular-shaped building; (2) the building does not subject to across-wind loading such as
vortex shedding: or it does not have a site location for which channpling effects of buffeting effect
warrant special consideration.
"
Envelope Procedure for low-rise buildings.
"
Directional Procedure for Building Appurtenances (rooftop structures and rooftop equipment) and
Other Structures (solid freestanding walls and signs, chimneys, and trussed towers).
"
Wind Tunnel Procedure for all buildings and all other structures.
Since tall building is the subject of analysis in this thesis, the first procedure (Directional Procedure for
buildings of all heights) is used to calculate the quasi-static wind loads applied on the structure. The steps
are summarized:
"
Determine risk category of the building.
"
Determine the basic wind speed V.
o
Look up the value in related Figure 26.5-1 A, B or C in ASCE 7-10, depending on the risk
17
category chosen. The basic wind speed V corresponds to a 3-sec gust speed at 33ft (10m)
above the ground in Exposure Category C.
m
Determine wind load parameters (Wind Directionality Factor Kd, Exposure Category, Topographic
Factor Kzt, Gust Effect Factor G, Enclosure classification, Internal Pressure Coefficient GCpi.
o
Based on Table 26.6-1 in ASCE 7-10, the value of Wind Directionality Factor Kd is 0.85 for the
MWFRS of buildings.
o
Exposure Category should choose from type B, C or D based on the analysis case. Generally
speaking, Exposure C is the most common.
o
The Topographic Factor Kzt accounts for the effect of isolated hills or escarpments located in
exposures B, C and D. For simplicity considerations, this effect is neglected in the calculations
of wind loads in this thesis. Thus the value of Kzt is taken as 1.
o
Gust Effect Factor G will be explained separately in the next section (section 3.4.1).
o
Enclosure classification has three kinds: open, partially enclosed and enclosed.
o
The value of Internal Pressure Coefficient GCpi is 0.00 for open buildings, ~0.55 for partially
enclosed buildings and ~-0.18 for enclosed buildings.
"
Determine Velocity Pressure Exposure Coefficient Kz or Kh.
o
For 1 5 ft
z zg,
Kz = 2.01( z)2/a. The value of zg and a are chosen from Table 26.9-1 in
9
ASCE 7-10 (Figure 9).
Determine Velocity Pressure qz or qh-
o
"
qz = 0.00256KzKztdK 2 (lb/ft 2) = 0.00256KzKztKd V2 (N/M 2
)
"
Determine External Pressure Coefficient C, or
o
CN.
C, is used for enclosed and partially enclosed buildings.
CN
is for open buildings. Their values
could be looked up in Figure 27.4-1 to 27.4-7 in ASCE 7-10.
m
Calculate wind pressure p on each building surface.
o
The calculations for p varies according to different building type. Since the tall building is the
subject of interest here, so only the calculation method of p for flexible buildings is presented
here.
o
p = qGfCp - qi(GCpi)
18
3.4.1 Gust Effect Factor
The Gust Effect Factor G accounts for dynamic amplification of wind loading in the along-wind direction
due to turbulence (buffeting). It doesn't include the influence of wind loading in the across-wind direction
such as the vortex shedding. The value of G varies for different building types. For rigid structures
(fundamental natural frequency is higher than 1Hz), The value of G is permitted to be directly taken as
0.85. However, for flexible structures (fundamental natural frequency is lower than 1Hz), the value of G
must be calculated case by case, implementing the following formulae.
1+1.712 gQ 2 +
G = 0.925 (
1 + 1
.7)(11)
R2
Where If is the intensity of turbulence at height f; f is the equivalent height of the structure;
Q is
the
background response; R is the resonant response factor; gQ = 3.4,g, = 3.4.
0.577
GR =
27n(3600n1 ) +
2n(3600n
(12)
)1)
I = c(33/z) 1/ 6 = c(10/Z) 1/ 6 (in Si units)
(13)
z= 0.6h (but not less than zmin)
(14)
S
1
.64 B + h) 0 6 3
+
(15)
z
LZ= -(-)'
(16)
33
R =
jRR
'7
Rn
jRB(0.53 + 0.4 7 RL)
A '7 r,
.
(1 + 10.3N1 )3
(18)
N, = nL2
Rf
j
= - -
112
(17)
(19)
1
2 (1 -
e
2),j
> 0
(20)
19
R, = 1,71 = 0
(21)
R 4.6nh
(22)
4.6n1 B
(23)
15.4n1 L
(24)
-
V2;
__
b
z \r (88\
-=
a
V
b
V (in SI
units)
(25)
Notes for Equation (11) to (25):
"
For Equation (20) and (21), the subscript e should be taken as h, B, L respectively.
=
B is the horizontal dimension of a building measure normal to the wind direction, in ft.
-
h is the mean roof height of a building, in ft.
-
L is the horizontal dimension of a building measure parallel to the wind direction, in ft.
"
The value of c in Equation (13), Zmin in Equation (14), e and ! in Equation (16), b and d in Equation
(25) are constants listed in Table 26.9-1 in ASCE 7-10 (Figure 9).
-
V in Equation (25) is the Basic Wind Speed.
20
I
Terrain Exposure Constants
Exposure
a
z, (ft)
a
B
7.0
1200
1/7
0.84
1/4.0
C
9.5
9(X0
1/9.5
1.00
D
11.5
700
1/11.5
1.07
b
C
f(f)
e
z
0.45
0.30
320
1/3.0
30
1/6.5
0.65
0.20
500
1/5.0
15
1/9.0
0.80
0.15
650
1/8.0
7
(ft)*
*z-=minimum height used to ensure that the equivalent height i is greater of 0.6h or z.
For buildings with h ! z,,. , i shall be taken as z.
In metric
Exposure
a
z, (m)
A
a
A
b
a
B
7.0
365.76
1/7
0.84
1/4.0
0.45
C
9.5
274.32
1/9.5
1.00
1/6.5
D
11.5
213.36
1/11.5
1.07
1/9.0
1(m)-
(M)*
e
0.30
97.54
1/3.0
9.14
0.65
0.20
152.4
1/5.0
4.57
0.80
0.15
198.12
1/8.0
2.13
bI(M
*z_= minimum height used to ensure that the equivalent height 1 is greater of 0.6h or z..
For buildings with hs zS, i shall be taken as z..
Figure 9 Table 26.9-1 in ASCE 7-10
21
Chapter 4 Dynamic Responses of Structures with Outrigger Systems
The structural response of a tall building is considered in three directions: along-wind, across-wind and
torsional. Due to the dynamic effects (vortex shedding and turbulence in wind speed) of wind illustrated
in Chapter 3, the corresponding structural responses are dynamic too, including motion and vibrations.
For the discussions of the responses below, the structure is assumed to be linear elastic.
4.1 Dynamic Along-wind Responses
As illustrated before, the wind speed in the along-wind direction could be regarded as the sum of static
component and turbulence component. The along-wind responses could be divided into a flow induced
part and a turbulence induced part. A suggested method of estimating peak along-wind displacement
Xmax(z) and acceleration kmax(z) of the structure is presented in ASCE 7-10, which is introduced below.
=
Xiax(Z)
#(z)pBhCfXYf
2
(2wn
)
2m,(2rnl1 )2
~
n
(26)
KG
where O(z) is the fundamental mode shape; p is the air density; B and h were defined in Section 3.4.1;
Cfx is the mean along-wind force coefficient. ml is the fundamental modal mass. nj is the fundamental
modal frequency. IV is the 3s gust speed at height Z. G is the gust factor, the calculation method of which
was illustrated in Section 3.4.1.
(z)
(27)
(Z)
p(z)p2(z)dz
nl = f
( 0=
V= b
(28)
V (in SI units)
(1.65)(3
K =
a+
+1
(29)
(30)
Notes for Equation (26) to (30):
"
The form of 5(z) is approximated from the actual mode shape.
"
p(z) in Equation (28) is the mass per unit height.
*
V in Equation (29) is the Basic Wind Speed.
"
The value of b and
is the mode exponent.
a could be looked up in Table 26.9-1 in ASCE 7-10 (Figure 9).
22
(31)
kmax(z) =9x6x(Z)
0.5772
g=
21n(n1 T) +
21n(n1 T)
0.8 5<P(z)pBhCfx972
a, (z) =
8IKR
m1
(32)
(33)
Notes for Equation (31) to (33):
"
T is the length of time over which the minimum acceleration is computed, usually taken as 3600s to
represent one hour.
-
The meaning of characters used in the Equations are the same as those introduced before.
4.2 Dynamic Across-wind Responses
The across-wind responses induced by vortex shedding are of major concern. When the frequency of
vortex shedding, as calculated by Equation (9), coincides or is very close to the frequency of a mode of the
structure, resonance happens. Resonance is the situation that should be strictly prevented for structures.
For the estimation of peak across-wind displacements i- and accelerations for the fundamental mode, the
theories proposed by Connor and Laflamme (2014) for analyzing the dynamic responses of periodic
excitations could be used.
U=
a =
2
(34)
(35)
H2
ps
p 2 )2P +
(2(p)2
(36)
P =(37)
where p is the peak modal force for the fundamental mode; fli is the modal mass for the fundamental
mode; fl is the frequency of the excitation force (in this case just the frequency of vortex shedding); w is
the fundamental natural frequency of the analyzed structure.
is the damping ratio.
23
The application of Equations (34) to (37) is not limited to the fundamental mode. For calculations of the
peak displacements and accelerations of other modes, one can just change the mode-related parameters
(modal force, modal mass and modal natural frequency) to the values of the corresponding mode in the
expressions.
From Equation (36), it could be deduced that
1
H2|IMaX
=2
(38)
-2
2
1
Prmax =1
-
(39)
22
Notes for Equation (34) to (39):
*
The factor H 2 could be regarded as a modification factor that takes into account the time-varying
characteristic of the excitation force and the system properties (stiffness and damping) (Figure 10).
5
4.5
S=0.0
4
3.5
3
~2.5
2
S=0.2
-
-
1.5
1
0.5
V2_
0
)
0.2
0.4
0.6
0.8
p=.
Figure 10 Plot of 112 versus p and
1
1.2
1.4
1.6
1.8
2
ff?
7(Connor and Laflamme, 2014)
From Figure 10, it is indicated that the ratio between the excitation frequency and natural frequency is
better either less than 0.4 or larger than 2. This is the basis for later discussions for the reduction of vortexinduced vibrations later.
24
Chapter 5 Modal Analyses of Structures with Outrigger Systems
To estimate the dynamic responses of the structures with outrigger systems, the first step is to perform
modal analyses and obtain the dynamic characteristics of the structures.
5.1 Analysis Model
The analysis model used in this thesis for a structure with outrigger systems is a discretized beam with
rotational springs that represent the outrigger systems (outrigger arms and columns), as shown in Figure
11.
mn
k,
kn. Cn
M24
0
k2 C2
ml@
k i C,
Figure 11 The analysis model of a discretized beam with springs (in this case, suppose there's only one outrigger at the top)
The rigidity of an outrigger truss Ks is related to the total rotation 6 of the outrigger truss at the location
where it is connected to the structure (Lee et al., 2008)
Ks=-
1
0
(40)
The rotation 6 could be obtained by superimposing the rotations caused by different reasons.
First, the restraining forces in the exterior columns will cause rotation of the outrigger resulting from the
axial shortening and lengthening of the columns. The corresponding rotation 61 is
25
2L
01 = d 2 EAC
(41)
where L is the vertical location of the outrigger from the ground; EAc is the axial rigidity of the exterior
column; d is the center to center distance between the exterior columns.
Second, the flexural deformation of the outrigger truss would cause an additional rotation 62, which is
given by
d
02 =
12EIO
(42)
where EIO is the flexural stiffness of the outrigger; d is the center to center distance between the exterior
columns.
Third, the rotation due to the shear deformation in the outrigger is given by
1
(43)
03 = GAh
where h is the height of the outrigger; GAO is the racking shear stiffness of the outrigger, which could be
calculated based on specific outrigger truss types. The calculations of GAO for different truss types are
introduced in Section 5.1.1.
Thus, the total stiffness of the outrigger can now be determined by
2L
1
d
1
d EAc
12E10
GAOh
Ks
2
(44)
Generally speaking, the bending stiffness (ElO) and shear stiffness GAO is very large and correspondingly
the value of d/12EIO and 1/GAOh are very small, having little influence on the overall value of K. The
outrigger columns are the major rotational stiffness provider.
5.1.1 Racking Stiffness
The calculations of the racking shear stiffness for different types of outrigger trusses (Figure 12) are
summarized as follows (Hoenderkamp & Bakker, 2003). The expressions are given based on trusses
consisting of standardized segments with a height h and a length a.
26
A
Ad
A
(b)
a
Ad
h
m
Ad
m
e
At
Ah
Ih
(C)
a
(d)
1
Figure 12 Different Truss Types for Outriggers
The racking shear stiffness for an X-braced segment as shown in Figure 12(a) is given by
2a2 h
GA 0 x = d 3 EAd
where
Ad
(45)
is the cross-sectional area of the diagonals and d is the length of the diagonals.
The racking stiffness of the K-braced segment as shown in Figure 12(b) is given by
GAOK=
where
Ab
a2 hE
a3
2d3
Ad +4Ab
is the cross-sectional area of the horizontal members;
(46)
Ad
is the cross-sectional area of the
diagonals and d is the length of the diagonals.
The racking stiffness of trusses with a single-diagonal (N-bracing trusses) as shown in Figure 12(c) is given
by
a2 hE
GA 0 _N = d 3 a3
Ad
(47)
Ab
where Ab is the cross-sectional area of the horizontal member; Ad is the cross-sectional area of the
diagonals and d is the length of the diagonals.
The racking stiffness of full-height knee-braced trusses as shown in Figure 12(d) is given by
27
GA0 _K= d
3
Ad
2n 2 hE
a3
7ne2
Ab
(48)
6ab
where m is the horizontal distance between the column and chord connections to bracings; e is the
horizontal distance between tops of the bracings; Ib is the second moment of inertia of the horizontal
members;
Ab
is the cross-sectional area of the horizontal members;
Ad
is the cross-sectional area of the
diagonals and d is the length of the diagonals.
Notes for Equation (45) to (48):
"
All connections are taken to be pinned with exceptions for K and Knee bracings, where the bracings
are pin connected at the top to continuous beams.
"
It's indicated the vertical members don't have any significant influence on the racking shear stiffness
5.2 Equation of Motion
Multi-story buildings with rigid floor diaphragms can be modeled by a lumped mass system, having three
degrees of freedom (axial, translational and rotational) at each floor level.
M
1
M
'lCTO
X
+
X
CXO
CYY CY
CTO C cL KC o
Kxx
X1 +K
Ky To
Kxo'
Kye
H
Koo J
X = (X1, X2, X3,
--
Y = (Y1, yz,
3,
-- ,yn)T
0 = (01, 02, 03,
6)T
O..
Xj
=Fx
= Fy
M
(
The dynamic equilibrium of the building motion could be written as:
(49)
Xn)
M = diag(mi)
I = diag(I)
where mi is the lumped mass at floor i; It is the second moment of inertia of the tributary area (half of
the lower floor i and half of the upper floor i + 1) about the horizontal axis through the reference center;
Cxx, Cx,, Cyy, Cyo, Coo are n x n damping submatrices of the structure; Kxx, Kxo, KyyKyo
Koo are
n x n stiffness submatrices of the structure.
28
Since the axial deformation of the building core is negligible, the equation could be reduced as:
(v +rCxx Cxy]
[M
M
j
+ [Kxx
Kxj fXj = {Fxi
+
(0
(50)
5.3 Modal Parameters
5.3.1 Natural Periods and Mode Shapes
The natural periods T (and correspondingly the natural frequencies o and related mode shapes (D is
obtained from an eigenvalue analysis of the undamped free vibration of the structural system.
&
2
is the
eigenvalues of M-'K and (b is the corresponding eigenvectors.
5.3.2 Modal Mass, Damping, Stiffness and Force
Modal mass m, damping cj, stiffness kj and force
m = P
c=
Qj of the system can be given respectively as:
MTPX + OP 7 M'P
2m
rn
1
(52)
(53)
k =1 7 W2
j= OT Fx +
(51)
pTM
(54)
Where wj is the jth modal circular frequency; j is the jth modal damping ratio.
5.4 Implementation of Modal Analysis in Matlab
The process of modal analysis could be implemented in Matlab. The structure of the MATLAB codes are
clarified here and the scripts are attached in Appendix A. The correctness and accuracy of MATLAB results
were verified with a FEM model built and analyzed with the software GSA. The modeling and analysis
procedure is as follows
"
Define number of node.
"
Define material and section properties including Young's Modulus E and second Moment of Inertia
for each floor I (an 1 x n matrix).
"
Build overall stiffness matrix K (further illustration in section 5.4.1).
29
"
Build mass matrix M.
-
Perform eigenvalue analysis of M- 1 K, obtaining the modal periods and mode shapes.
5.4.1 Formation of Overall Stiffness Matrix K
For a uniform beam element, the element stiffness matrix is given by
~12
6L
k =L3 -12
6L
6L
4L2
-6L
2L 2
-
El
-12
-6L
12
-6L
6L
2L 2
-6L
4L]
(55)
where L is the length of the element, E is the Young's Modulus and I is the second moment of inertia of
the cross section in the bending direction.
The corresponding compatibility equation for the element is
Fxi
m
Fx.
_
12
El 6L
L -12
6L
6L
4L2
-6L
2L 2
-12
-6L
12
-6L
6L
2L 2
-6L
4L j
vi
6
vi
(56)
where vi and 6 ; are the horizontal and rotational displacements of node i ; v1 and 6j are the horizontal
and rotational displacements of nodej.
Mj(
M
F-
IFxi
Figure 13 A uniform beam element
First, for a structure without rotational springs built up out of multiple uniform elements (Figure 14), the
overall stiffness matrix is the sum of element stiffness matrices.
The stiffness matrix k could be divided into four parts based on the nodes for the convenience of
.
expression for the overall stiffness matrix K 0
30
k
ki;ki
kj=
k kj
According to Equation (55)
El 12
[36L
6L ]kj=El
4L2? k3
El -12
6L ],kji
2C2,k
[-12
-6L
n
TT
-6L
-6L]k
22
E[-12
3k; -6L
,
-6L]
41.?
9
ljj E
3
9
41
2
11
T
Figure 14 Structure consists of multiple uniform beam elements
_kT
ki
KO =
k1 2
k
0
+ k
0
kT
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
k
k n-2,n__ + k n-i _
k nun-i
Pq
0
k
(57)
i-
where kI represents the corresponding submatrix of the element stiffness matrix of member c. For
instance
23
where E2 ,
2
= E2 12
[-12
L2 [-6L 2
6L 21
2L2]
and L 2 are the Young's Modulus, second moment of inertia of cross section and length of
member 2.
31
Then, for the structure with springs added to one or several nodes, its overall stiffness K' is obtained by
adding the rotational stiffness of spring on ith node (k,j) to the term on the 2ith row and 2ith column of
the KO matrix illustrated above.
Finally the stiffness matrix K for eigenvalue analysis is obtained by subtracting the elements in K'
corresponding to the fixed Degree of Freedoms (DOFs). In this case, the node 1 is fixed, so the fixed DOFs
are v, and 01, and the corresponding elements are in the first two rows and columns in K'. Thus the
matrix K (2n - 2 x 2n - 2 matrix) equals the matrix K' (2n x 2n matrix) after deleting its first two rows
and columns.
In summary, the process of building up the overall stiffness K for eigenvalue analysis is
-
Build the overall stiffness matrix K 0 for the model without considering the springs by summing up the
element stiffness matrices k of each member
-
Build the overall stiffness matrix K' considering the springs by adding the corresponding rotational
stiffnesses to matrix K0
-
Obtain the overall stiffness K for eigenvalue analysis by deleting the first two columns and rows of
matrix K'
32
Chapter 6 Influence of Outrigger Systems on Modal Properties
Natural frequencies of structures are of great importance for wind design. As when they coincide with the
frequencies of wind effects (primarily the vortex shedding), resonance will happen, leading to hazardous
performance of the structures in concern. For conventional preliminary modal analysis of tall buildings,
the structure is usually idealized as a cantilever beam. In most situations, the influence of outrigger
systems on the natural frequencies and mode shapes are neglected. However, this preliminary analysis
method might result in noticeable inaccuracies, since the very stiff outrigger systems have significant
influence on the natural periods of structures and change the mode shapes of structures under vibrations.
This chapter is meant to discuss the influence of outrigger systems on the natural frequencies of the
structures as well as the mode shapes. In the process, the influence of different locations of outriggers in
elevation and the rotational stiffness and number of outriggers are discussed.
The basic parameters of the analysis model introduced in Chapter 5 are summarized in Table 1.
Table 1 Basic parameters of analysis model
Number of
Floor
Young's
Moment of
Mass
Mass
Floors
Height
Modulus
Inertia
mj/kg
man+/kg
n
Li/m
E/Mpa
I/M4
50
3
2.05 * 105
21.33
376800
188400
Note: (1) i is the floor number; the value of i is from
1 to n; (2)j is the node number; the value of] is from 2 to n.
6.1 Influence of Different Locations of Outriggers in Elevation
The analysis in this section is based on the following two assumptions:
"
There's only one outrigger system in the structure.
"
The rotational stiffness of the outrigger system is infinitely large, which means that the rotational
degree of freedom of the node to which the outrigger is attached to the structure is actually fixed.
33
6.1.1 Influence on Natural Periods
First, the fundamental period of the structure without the outrigger system is calculated. Then the
outrigger system is added to the analysis model and its location is changed from 11 floor to 5 0 th floor. The
results for fundamental periods of the structure is shown in Figure 15.
Locations of Outriggers in Elevation VS Natural Periods
8
7
6
0
5
4
E
LL
4111F
3
2
1
0
10
5
0
30
25
20
15
35
40
45
50
Location of Outrigger/ floor number n
Fundamental Period without Outrigger -+- Fundamental Period with Outrigger
-
Second Mode Period with Outrigger
-
Second Mode Period without Outrigger
Figure 15 Plot of outrigger locations in elevation and naturalfrequencies
Comparisons of fundamental periods with and without outrigger are presented in Table 2. Comparisons
of second mode periods are presented in Table 3.
Table 2 Comparisons offundamental periods with and without outrigger
Fundamental Period without Outrigger/s
6.82
Fundamental Period with Outrigger/s
Difference
Maximum
8.35 (floor 1)
6%
Minimum
2.90 (floor 25)
64%
Average
3.68
46%
34
Table 3 Comparisons of second modal periods with and without outrigger
Fundamental Period without Outrigger/s
Fundamental Period with Outrigger/s
0.39
Difference
Maximum
1.09 (floor 24)
0%
Minimum
0.54 (floor 37)
50%
Average
0.81
26%
Some implications from the analysis above are:
"
The influence of the outrigger system on the natural periods of the structure is significant, which
shouldn't be neglected in preliminary analysis of tall building structures.
"
The influence of the outrigger system on the fundamental mode is the most significant. It decreases
with the increase of the mode order.
m
With the introduction of an outrigger system in the structure, the natural periods are decreased due
to the large additional rotational stiffness.
m
The influence of the outrigger system is most significant when the outrigger is connected to the floor
where it's slightly higher than the location with the maximum curvature in the corresponding mode
shape of the structure without outrigger. As shown in Figure 16, the curvature for the first mode (of
the model without outrigger) is largest at a location a bit lower than the middle point. The drop of
fundamental period is greatest when the outrigger system is connected to the
2 5 th
floor; the curvature
is largest at a location slightly lower than 3/4 of the structural height for the second mode shape. The
drop of the second mode period is largest when the outrigger is connected to the
3 7 th
floor (37/50 =
0.74 ~ 3/4). This can be explained by that a higher outrigger applies its counter-acting moment over
a longer part of the building.
35
Fundamental Mode Shape
Q
E
Z
-o
0
0
Second Mode Shape
50
50
45
45
40
40
35
35
30
30
E
25
25
0
0
20
20
U-
15
15
10
10
5
0
0.0
0.5
1.0
Normalized Lateral Displacement
-1.0
-0.5
0.0
0.5
1.0
Normalized Lateral Displacement
Figure 16 Fundamental and second mode shape of analysis model without outrigger
6.1.2 Influence on Fundamental Mode Shape
The influence of the outrigger system on the fundamental mode shape of the analysis model is then
investigated. Two locations (2 5th and 50th floor) that have relatively greater influence on the mode shapes
are selected for analysis, which are the floors where the rotational angles are larger. The corresponding
mode shapes are shown in Figure 17.
36
Locations of Outrigger VS Fundamental Mode Shapes
45
40
35
30
E
-
Without Outrigger
-
Outrigger on 25th Floor
25
0
0
T-
20
Outrigger on 50th Floor
15
10
5
0
0.0
0.5
1.0
Normalized Lateral Displacement
Figure 17 Fundamental mode shapes with and without outrigger
Comparisons of the mode shapes are summarized in Table 4.
Table 4 Comparisons of the mode shapes of model with and without outrigger
Outrigger Location
2 5 th
Floor
Maximum Disp. Difference
Floor Number
Average Disp. Difference
0.13
1 9 th
0.06
5 0 th Floor
0.23
0.13
3 3 rd
Naote: the difference values are calculated based on the absolute value of the displacement of mode shape with outrigger minus
that of mode shape without outrigger.
It's indicated that the influence of the outrigger system on the fundamental mode shape is not negligible,
which is about 10% to 20% of the maximum displacement (with a value of 1 after normalization).
Although this influence could not be really described as "significant", the change of the shape is worth
special attention during the dynamic analysis of the structure. More discussions for this point are
proposed in Chapter 7 during the analysis of the wind-induced responses of the model.
37
6.2 Influence of Rotational Stiffness and Number of Outrigger Systems
It could be predicted that with the increase of rotational stiffness and/or number of the outrigger systems,
their influence on the natural periods and mode shapes would become greater. Analyses were performed
to verify the prediction and at the same time, to get more quantitative results.
First, the influence of the rotational stiffness of the outrigger system was analyzed. The assumptions are:
" There's only one outrigger system in the structure.
" The location of the outrigger is at the middle (2 5th floor) of the model (since this is when the influence
of the outrigger system is most significant as indicated in section 6.1.1).
The results are presented in Figure 18, where the horizontal axis is in logarithmic scale.
Rotional Stiffness of Outrigger Systems VS Fundamental Periods
8
7
6
5
Um2
0
1.OE+05
1.OE+06 1.OE+07 1.OE+08 1.OE+09 1.OE+10
1.0E+11 1.OE+12
1.OE+13 1.OE+14 1.OE+15
Rotational Stiff ness/(N.mn/rad)
Figure 18 Plot of rotationalstiffness of outriggersystem andfundamnentalperiod
It's noted that there's a "critical" range where the change of fundamental period is very sensitive to the
change of the rotational stiffness of the outrigger systems. An explanation is that when the stiffness is too
small, its restraining effect is too small to influence the period significantly. On the other hand, when the
rotational stiffness of the outrigger system increases to a certain limiting value, the equivalent rotational
spring gets too stiff and essentially acts as a rigid rotational restraint at the corresponding node and the
further increase in rotational stiffness will not incur any significant period change anymore.
Second, the number of outriggers were varied to examine its influence on the fundamental period. The
obtained results are shown in Table 5. The assumptions for this analysis are
38
"
The stiffness of the outrigger systems are infinitely large.
*
The outriggers are evenly distributed along the structural height. For the one-outrigger case, it's
located at the middle of the model.
Table 5 Number of outriggers and fundamental periods
Number of Outriggers
Floor Number
Fundamental Period/s
6.82
0
1
26th
2.43
2
26th 50th
2.18
3
16th
33rd
50th
1.44
The results corroborate the prediction that with the increase of the number of outriggers, the stiffening
effect of the outrigger systems gets stronger and thus the fundamental period keeps decreasing.
The analyses of the mode shape changes were performed in a similar way. The results verified the
previous prediction that the larger the rotational stiffness the greater mode shape deformations. Due to
the restraining effect of the outrigger systems on the rotation of the nodes to which the outriggers are
connected to the model, the more outriggers, the more distorted the mode shape becomes compared
with the original mode shape of the model without any outrigger.
39
Chapter 7 Wind-induced Displacements and Accelerations
As illustrated in Chapter 4, wind-induced structural responses could be treated in along-wind and acrosswind two directions. Along-wind responses are primarily induced by wind buffeting and across-wind by
vortex shedding. In this chapter, the responses of the along-wind displacements and accelerations are
analyzed quantitatively based on ASCE 7-10. Across-wind responses are discussed from a qualitative
perspective.
7.1 Along-wind Responses of Structures with Single Outrigger System
7.1.1 Along-wind Displacements
According to Equation (26), the peak along-wind displacement Xmax(z) could be calculated as
Xniax(Z) =
th(z'lpBhC
jj2
zr-fxz
2m 1 (2Tn 1 ) 2
(26)
KG
where O(z) is the fundamental mode shape; p is the air density; B and h were defined in Section 3.4.1;
Cfx is the mean along-wind force coefficient. m, is the fundamental modal mass. nj is the fundamental
modal frequency. V2 is the 3s gust speed at height f. G is the gust factor, the calculation method of which
was illustrated in Section 3.4.1.
4(0) = ((27)
mi =
=
h
(28)
p(z)P2(z)dz
=
V (in S units)
(29)
(30)
K =
The calculations of the displacements are implemented in Excel. The process are as follows:
-
Obtain the value of nj and the fundamental mode shape
# 0 (z)
using the previously created MATLAB
scripts
"
Obtain the mode shape 4(z) and value of. by approximating the actual mode shape
# 0 (z)
using a
40
.
function form of
h).
The criteria is minimizing the variance Z((z) - 4 0 (z)) 2 (z = 3,6,9 .--
"
Determine the value of parameter p, B, h, p(z) and CfX
-
Obtain the value of m, through integration
"
Calculate the value of G (see section 3.4.1)
"
Calculate the value of K and Vz (the value of b and I could be looked up in Table 26.9-1 in ASCE 7-10
as shown in Figure 4; V could be looked up in Fig. 26.5-1 in ASCE 7-10)
A summary of the parameters selected which stay constant in the analysis are shown in Table 6.
Table 6 Invariant parameters selected for peak along-wind displacements calculations
p/(kg/M 3 )
B/m
h/m
Cfx
j(z)/(kg/m)
a
b
V/(m/s)
PZ/(M/s)
1.225
4
150
2
125600
1/9.5
1.00
58
73
First, the single-outrigger situation was investigated. The locations of the outrigger were chosen to be
2 5 th 3 8 th
and
5 0 th
1 2th,
for analysis. The obtained data are presented in Table 7 and Figure 19.
Table 7 Displacement calculation related results for different outrigger locations
Floor Number
None
n 1 /Hz
m 1 /kg
K
G
Xmax(h)/mm
0.15
4.60 x 106
0.3970
0.8511
339.83
0.25
3.43 x 106
0.3142
0.8509
122.81
0.41
5.04 x 106
0.4259
0.8508
42.23
)O-70
0.30
7.85 x 107
0.5839
0.8508
69.80
).96
0.23
6.45 x 106
0.5104
0.8509
122.69
(z)
(
Z
)1.5s
150
12
(_)2.2s
150
25
(5)1.37
Z
150
38
50
150
(
150
Note: (1) The results in the first row are when there's no outrigger in the model. (2) Xmax(h) stands for the peak along-wind
displacement at the top of the structure.
41
-ANN-
Peak Along-wind Displacements VS Outrigger Locations
400.00
E 350.00
E 300.00
E
250.00
0)
200.00
L)
-o 150.00
0.
dC
-C:
100.00
50.00
0.00
10
0
50
40
30
20
60
Floor Number
--
Displacements with Outrigger
-
Displacements without Outrigger
Figure 19 Peak along-wind displacements of models with and without outrigger
It's noticed that the existence of outrigger decreases the dynamic displacements of the structure. The
most significant decrease happens when the outrigger is located at the middle of the structural height,
where the maximum displacement becomes 13% of the original value. The influence of the outrigger
system gets smaller when its location approaches the base or the top of the structure.
7.1.2 Along-wind Accelerations
According to Equation (31) to (33), the peak along-wind accelerations could be calculated based on
(31)
9max (Z) = g"xU(z)
0.5772
2n(n 1T) +
0.5772
(32)
V 21n(n1T
)
9x =
=
0.85p(z)pBhCrfVj IjKR
7n1
(33)
The results of the peak accelerations at the top of the analysis model are summarized in Table 8 and
shown in Figure 20. The parameters that are repetitive with the ones used in the calculations in Section
7.2.1 are not repeated here.
-
-,--
-
-
__
-
I -r
--
--
f-MMMM1-- -
-
.
42
Table 8 Acceleration calculation related results for different outrigger locations
i
R
9x
c-x(h)
None
0.0313
3.70
0.0016
9.25
12
0.0156
3.85
0.0008
5.10
0.0082
3.97
0.0004
2.55
0.0124
3.89
0.0006
3.32
0.0172
3.83
0.0008
4.82
28
0.14
35
50
9max(z)/(mm/s
2
)
Floor Number
Note: (1) The results in the first row are when there's no outrigger in the model. (2) Xmax(Z) stands for the peak along-wind
acceleration at the top of the structure. (3) The calculations of f and R could be found in relative equations in section 3.4.1.
Peak Along-wind Accelerations VS Outrigger Locations
10.00
E
E
a
0
9.00
8.00
7.00
6.00
5.00
4.00
a
3.00
2.00
1.00
0.00
0
10
20
-w- Accelerations with outrigger
30
40
50
60
Floor Number
Accelerations without Outrigger
Figure 20 Peak along-wind accelerations of models with and without outrigger
The influence of the outrigger system on the peak along-wind acceleration at the top of the structure is
similar to that on displacement. The presence of an outrigger decreases the peak accelerations. The most
effective control happens when the outrigger is connected to the middle of the structure, with the peak
acceleration dropping to about 30% of the original value.
43
- - W111111- -
-- I'll,
-
.
W
...
.......
_..
...
....
....
.... ...
7.2 Along-wind Responses of Structures with Multi-Outrigger Systems
The same methodology for calculating the responses of single-outrigger-braced structures was applied to
the calculations of the multi-outrigger-braced structures. The differences between the two are the
approximation results of fundamental mode shapes p(z) and fundamental frequencies nj. The influence
of number of outriggers are discussed below. The assumption is that the outriggers are distributed evenly
over the structural height. When there is only one outrigger, it is located at the top.
Table 9 Displacement calculation related results for different number of outriggers
Number of Outriggers
m1 /kg
K
G
Xmax(h)/mm
0.15
4.60 x 106
0.3970
0.8511
339.83
n1
(Z)
lHz
(
None
).ss
150
1
(--)0.96
0.23
6.45 x 106
0.5104
0.8509
122.69
2
(
)o.67
0.46
8.05 x 106
0.5938
0.8508
29.67
3
(
.)-67
0.69
8.05 x 106
0.5938
0.8508
12.94
4
()O.64
0.91
8.26 x 106
0.6040
0.8509
7.35
150
150
150
Note: (1) The results in the first row are when there's no outrigger in the model. (2) Xmax(h) stands for the peak along-wind
displacement at the top of the structure. (3) Other parameters beside those shown in this table are the same as those presented
in Table 6.
Peak Along-wind Displacements VS Number of Outriggers
400.00
E 350.00
300.00
E
250.00
200.00
-2
E0,
C:
150.00
100.00
50.00
Cci)
0.00
0
1
2
3
4
5
Number of Outriggers
-+-
Displacements with outrigger
-
Displacements without Outrigger
Figure 21 Peak along-wind displacements of models with different number of outriggers
44
It is obvious that the more outriggers, the more effective the control over the dynamic along-wind
displacements of the structure. With the very stiff restraints on the rotations of the analyzed structure at
certain floors, the influence of the number of outrigger systems on the structural responses is significant.
Similar analyses were conducted about the peak along-wind accelerations of the multi-outrigger-braced
model, the same conclusion was obtained. With the increase of the number of outriggers, the peak alongwind acceleration decreases conspicuously.
7.3 Discussions about the Calculation of Along-wind Responses
For the calculations of the displacements and accelerations above, there's one important assumption that
the actual fundamental mode shape could be approximated by a power function O(z) in the form of
(z/h) . Although the model without the outrigger could be approximately well with the function form,
whether the model with the outriggers could be approximated similarly remains to be examined, since as
mentioned in Chapter 6, the outrigger distorts the fundamental mode shape to some degree.
The approximation results of qb(z) used in the calculations of structures with single outrigger system are
presented in the following Figure 22.
45
No Outrigger
Outrigger on 12th Floor
50
50
45
45
45
40
40
40
35
35
35
30
30
30
25
25
25
20
20
20
15
15
15
10
10
10
5
5
5
50
0
0
0
0
0.5
-
Actual Mode Shape
-
Approximated Shape
Outrigger on 25th Floor
0.5
0
1
-
(4(z) - 40(z))2 = 0.009
((p(z)
1
Actual Mode Shape
-
Actual Mode Shape
Approximated Shape
-
Approximated Mode Shape
-
E
0(Z))2 = 0.041
Outrigger on 38th Floor
(4(z)
-
#O(z))2 = 0.121
Outrigger on 50th Floor
50
50
45
45
40
40
35
35
30
30
25
25
20
20
15
15
10
10
5
5
0
0.5
0
1
0
0
0.5
1
0
0.5
1
-
Actual Mode Shape
-
Actual Mode Shape
-
Approximated Shape
-
Approximated Shape
( (z) - 4)0(Z))2 = 0.748
_
(q(Z)
())2
=
0.284
Figure 22 Approximations of actual mode shapes and variance between actual and approximated mode shapes
46
It is noticed that the approximations for outrigger-braced model are not as "ideal" as the no-outrigger
model. Especially in a case like when the outrigger is on the
3 8 th
floor, the variance is not trivial. Although
in the calculations presented in section 7.1.1 and 7.1.2 the approximated mode shapes are used, the
accuracy of this assumption still needs to be further discussed. However here the accuracy is said more
from a quantitative perspective which means that the implications for the trend of the influence of
outrigger locations obtained above are reasonable. It's just that the calculated values of displacements
and accelerations are in need of further improvements of accuracy.
Although only the single outrigger situation is presented here, the same issue exists for the multi-outrigger
situations too. The accuracy of the calculation results depends largely on how closely the approximated
fundamental mode shape resembles the actual fundamental mode shape.
7.4 Across-wind Responses
The across-wind responses of models with outrigger systems are discussed from a qualitative perspective.
As illustrated before, the across-wind responses induced by vortex shedding are of primary concerns.
Resonance happens when the frequency of vortex shedding coincides with one of the natural frequencies
of the structure. The resonance phenomenon is most severe when the fundamental frequency of the
structure is coincided. Thus, the priority of outrigger system design in preventing the across-wind
resonance should be to shift the fundamental frequency of the structure away from the possible vortex
shedding frequencies. Specifically, as discussed in Section 4.2, the ratio between the excitation frequency
and natural frequency (p = f2/w) is better either less than 0.4 or larger than 2.
The steps for assuring the safety of the structure against the vortex-induced responses could be
summarized as follows:
"
Calculate the fundamental frequencies of the outrigger-braced structures with different outrigger
distribution scenarios (using the MATLAB code in Appendix A)
"
Calculate the frequency of vortex shedding using Equation (9) in Section 3.2
"
Obtain the ratio between vortex shedding frequency and natural frequency (p = d2/w) for different
scenarios
"
Only the scenarios with a p smaller than 0.4 or larger than 2 could be considered for the design
47
Take the analysis model introduced above as an example. When there is only one outrigger and the
different scenarios are that the location of the outrigger is on floor
1 2th, 2 5
th
3 8 th
and
50
th
and the
corresponding fundamental frequencies are 0.25Hz, 0.41Hz, 0.30Hz and 0.23Hz respectively.
The vortex shedding frequency is
0.12 x 58 x (150 )1/9.5
VS
f = D-=
= 2.31 Hz
4
The value of S = 0.12 is taken based on the following Figure 23.
StI
0.10
0.05
o~os
-----------
I
I
I
1
2
3
4b
I
4
5
6
7
8
9
10
d/b
Figure 23 Strouhal number values for different rectangular shapes (Bj]rnland, 2013)
The frequency ratio p for different outrigger locations are 9.2, 5.6, 7.7 and 10.0 respectively. Since all of
them are in the safe range (p > 1.4). So for all the scenarios, the influence of vortex shedding won't cause
resonance that jeopardizes the safety of the structure.
In the example above the frequency ratio p is large, because the stiffness of the analysis model is set
comparatively smaller than the real-world structure in order to amplify the periods slightly making the
comparisons in the previous sections more conspicuous. However, for real-world structures with outrigger
systems, this check is of great importance. The influence of outrigger systems on the natural frequencies
of the structure is significant, and it's likely that the structure with outrigger systems has a frequency that
lies in the unsafe region which will lead to the across-wind resonance induced by vortex shedding.
48
Chapter 8 Motion Based Design Methodology of Outrigger Systems
With all the introductions and discussions in the last chapters on the modal properties and wind-induced
responses of structures with outrigger systems, methodologies for the wind-induced motion based design
of outrigger systems are summarized and proposed. Two scenarios are considered, with and without the
number and locations of the outrigger systems preset. Before the two methodologies are proposed,
relative human comfort criteria for motions and later drift limits for tall building structures are introduced.
8.1 Human Comfort Criteria for Motions (Accelerations) and Lateral Drift Restraints
The accelerations of tall buildings that are not large enough to cause structural damages may still induce
human discomfort. It is important to maintain the structural acceleration under comfortable limit of the
occupants. According to the super tall building design guidelines proposed by Thornton Tomasetti, the
general human comfort criteria adopted in U.S. practice are summarized in Table 10. The criteria are based
on wind speed with a return period of 10 years.
Table 10 Human comfort criteria under wind-induced building motions (10-year wind)
Type of Use
Residential
Hotel
Office
Retail
Acceleration Limit (milli-g)
10-15
15-20
20-25
25+
The overall building drift requirement in U.S. is H/400 under 10-year wind.
8.2 Scenario One - Number and Locations of Outriggers Preset
Due to real-world structural design constraints, in a lot of cases, the number and locations of outriggers
are preset to be matched with the number and locations of mechanical and/or refuge floors. In this
scenario, the primary goal of optimization is to check the preset outrigger system design based on human
comfort motions and lateral drifts, and if necessary, to adjust the stiffness of the outrigger systems. The
adjustment of outrigger system is not recommended, since it's mainly related to the distance between
exterior columns as well as their dimensions. If the stiffness is changed by changing the locations and/or
49
dimensions of the exterior columns, many other properties of the structure such as the overall stiffness
and mass will change as a result. The total influence of all the changed parameters on the modal properties
of the analysis model will become hard to predict and control.
The proposed optimization process for this scenario is summarized in Figure 24.
Build Analysis Model
"
Obtain the flexural stiffness El, for each floor i
"
Form the overall stiffness matrix K (outrigger
systems included) and mass matrix M
Modal Analysis of Model
*
Obtain the natural periods and mode shapes
through eigenvalue analysis of K and M
Check Vortex-induced Resonance
f
*
Calculate the frequency of Vortex Shedding
"
Calculate the ratio p between the frequency of
Vortex Shedding and fundamental frequency
"
Check if p is in the safe range (smaller than 0.4
or larger than 1.4)
Check Along-Wind Responses
"
Calculate the peak-along wind responses
(displacements and accelerations)
"
Check for related lateral drift and motion
requirements
Figure 24 Proposed process for checking outrigger system design in scenario one
50
8.3 Scenario Two - Number and Locations of Outriggers Not Preset
If the number and locations of outrigger systems are not pre-determined due to the constraints of the
structural design of a building, the optimization process is more of designing the outrigger systems for the
human comfort and lateral drift criteria. The process is more flexible in this scenario compared with the
first one. A proposed optimization methodology for this scenario two is summarized in Figure 25.
Build Analysis Model
i
"
Obtain the flexural stiffness Eli for each floor
"
Form the overall stiffness matrix KO (outrigger systems not included) and mass matrix M
*
Decide number of outriggers initially as one
Design for Vortex-induced Resonance
ifthere's only one outrigger, then
*
change the location of the outrigger, Build the corresponding overall stiffness matrix K (outrigger system
included) and obtain the fundamental period each time
ifthere are more than one outrigger, then
Suppose
the outriggers are evenly distributed along the structural height, Build the corresponding overall
stiffness matrix K (outrigger systems included) and obtain the fundamental period
For all situations, proceed to
f
"
calculate the frequency of Vortex Shedding
"
calculate the ratio p between the frequency of Vortex Shedding and fundamental frequency
if there is/are p in the safe range (smaller than 0.4 or larger than 1.4)
a
Select the locations of outrigger where the corresponding p is in the safe range for next-step calculations
if there is no p in the safe range
"
increase the number of outriggers by one and repeat this step until it's qualified to proceed to the next step
Design for Along-Wind Responses
"
Calculate the peak-along wind responses (displacements and accelerations) for the locations
selected in last step
If there is/are response(s) meeting the related lateral drift and motion requirements, then
*
Choose the location(s) with the minimum along-wind responses, optimization design process
finishes here
if there is no response meeting the related lateral drift and motion requirements, then
Increase the number of outriggers by one, repeat step two (Design for Vortex-induced Resonance)
and this step until the optimization design process finishes
Figure 25 Proposed process for optimizing outrigger system design in scenario two
51
Chapter 9 Future Research
Further research into the dynamic characteristics of outrigger-braced structures are of necessity and great
importance. Efforts could in particular be made in the areas listed below.
*
Improvement of analysis model.
The model built in this thesis is a MDOF lumped mass model with rotational springs. The stiffness
matrix K is formed based on the flexural stiffness EI of each floor and the equivalent rotational
stiffness of outrigger systems. Questions such as how to include the shear stiffness GAi of each floor
into the model (especially for structures with core walls) and whether it is more accurate to analyze a
continuous model instead of a discretized model still need to be answered.
-
Accuracy of Calculations of Along-wind Responses.
As mentioned earlier, for the calculations of the along-wind responses (peak displacements and
accelerations) proposed in ASCE 7-10, a major assumption is that the structure's fundamental mode
shape could be approximated using a power function with a form of (z/h) . Since the outriggers have
noticeable influence on the mode shapes, whether the assumption is still verified for structures with
outrigger(s) is a point in need of further discussions. Besides, the accuracy of the code-based results
for the along-wind responses of structures with outrigger systems needs to be evaluated quantitatively.
52
Chapter 10 Conclusions
This research has focused on the dynamic characteristics and wind-induced responses of outrigger-braced
structures. A Matlab script was written for the analyses and comparisons of various outrigger-braced
models. Wind provisions in ASCE 7-10 were implemented to calculate the wind-induced responses (peakalong-wind displacements and accelerations) of different models. The influences of outrigger systems on
the modal properties and along-wind and across-wind responses of structures were discussed. Finally
wind-induced motion based outrigger system design methodologies were proposed.
The major conclusions and findings are summarized as follows
"
The influence of outrigger systems on the dynamic properties (natural periods and mode shapes) of
structures are significant and should not be ignored in the structural analysis process (including the
preliminary analysis).
o
The presence of outrigger systems stiffens the structure, reducing the natural periods and
restraining the rotations of the structure at locations where the outriggers are connected.
"
Change of number, locations and rotational stiffness of outrigger systems have various
influence on the modal properties.
"
The more outriggers, the more significant the decrease in natural periods.
"
The influence of outrigger on modal periods and mode shapes is the most significant
when it's connected to thi-e modeil
at location(s) siightiy higher than the largest
curvature(s) happen in its original mode shapes without outrigger(s)
*
There's a critical range where the change of fundamental period is very sensitive to
the change of the rotational stiffness of the outrigger systems
"
Conventional MDOF model without rotational springs are not sufficiently accurate for the analysis of
structures with outrigger systems. Springs equivalent to the outrigger systems must be added.
o
The rotational stiffness of outrigger systems are primarily related to the design of exterior
columns such as the distance between the opposite two exterior columns and their
young's
Modulus and geometric dimensions.
"
The influences of outrigger systems on along-wind displacements and accelerations are conspicuous.
o
The presence of outrigger decreases the dynamic displacements and accelerations of the
structure. In a single-outrigger situation, the influence is most significant when the outrigger
is located at the middle of the structural height, and the influence decrease as the outrigger
53
approaches the base or top of the structure.
o
The more the outriggers, the more effective the control over the dynamic displacements and
accelerations of the structure.
*
Two different methodologies based on two different scenarios could be applied to optimize the
outrigger system design for a tall building structure.
o
For scenario one, when the number and locations of the outrigger systems are preset, the
corresponding methodology a checking process.
o
For scenario two, when the number and locations of the outrigger systems are not preset, the
corresponding methodology is a designing process.
The analysis models, calculations, discussions and methodologies presented in this thesis provide
reference for more reliable dynamic analysis of outrigger-braced structures, offer insight into the
influence of outrigger systems on modal properties and wind-induced responses and, hopefully,
encourage further research on outrigger systems from a dynamic perspective.
54
References
Ali, M. M., & Moon, K. S. (2007). Structural developments in tall buildings: current trends and future
prospects. Architectural Science Review, 50(3), 205-223.
American Society of Civil Engineers (Ed.). (2010). Minimum design loads for buildings and other
structures. Reston, Va: American Society of Civil Engineers : Structural Engineering Institute.
Bjornland, K. H. M. (2013). Wind-induced Dynamic Response of High Rise Buildings. Retrieved from
http://www.diva-portal.org/smash/record.jsf?pid=diva2:648718
Choi, C. K., & Kwon, D. K. (2000). Determination of the Strouhal number based on the aerodynamic
behavior of rectangular cylinders. Wind and Structures, 3(3), 209-220.
Choi, H., Ho, G., Joseph, L. & Mathias, N. (2012). Outrigger Design for High-Rise Buildings: An output of
the CTBUH Outrigger Working Group. Council on Tall Buildings and Urban Habitat: Chicago.
Connor, J., & Laflamme, S. (2014). Structural Motion Engineering. Cham: Springer International
Publishing. Retrieved from http://link.springer.com/10.1007/978-3-319-06281-5
Hoenderkamp, J. C. D., & Bakker, M. C. M. (2003). Analysis of high-rise braced frames with outriggers.
The Structural Design of Tall and Special Buildings, 12(4), 335-350. http://doi.org/10. 1002/tal.226
Lame, A. (2008). Optimization of outrigger structures. Massachusetts Institute of Technology. Retrieved
from http://dspace.mit.edu/handle/1721.1/43882
Lee, J., Bang, M., & Kim, J.-Y. (2008). An analytical model for high-rise wall-frame structures with
outriggers. The Structural Desiqn of Tall and Special Buildings., 17(4). 839-85 1.
http://doi.org/10.1002/tal.406
Smith, B. S., & Salim, I. (1983). Formulae for optimum drift resistance of outrigger braced tall building
structures. Computers & Structures, 17(1), 45-50.
Taranath, B. (2011) Structural Analysis and Design of Tall buildings: Steel and Composite Construction.
CRC Press: Boca Raton.
55
Appendix A Matlab Code for Modal Analysis
%Input parameters include:
%(1) number of nodes
%(2) properties of each floor (L, 1)
%(3) number and locations of outriggers
%(4) Related parameters of exterior columns (Ec, Ac)
%Output parameters include:
%(1) natural periods
%(2) mode shapes
clear
E = 2.05*1OA11; %pa
n = 51; %number of nodes
I = zeros (1,n-1);%moment of inertia of each floor
for i = 1:n-1,
I(1,i) = 6.75;
%mA4
end
L = zeros (1,n-1);%height of each floor
for i = 1:n-1,
L (1,i) = 3; %m
end
% Form stiffness matrix without outriggers
K = zeros (2*n);
K (1:2,1:2) = [12*E*1(1,1)/L(1,1)A3, 6*E*1(1,1)/L(1,1)A2; 6*E*1(1,1)/L(1,1)A2, 4*E*1(1,1)/L(1,1)];
for i = 2:n-1,
K (2*i-1:2*i, 2*i-1:2*i) = [12*E*1(1,i-1)/L(1,i-1)A3, -6*E*1(1,i-1)/L(1,i-1)A2; -6*E*l(1,i-1)/L(1,i-1)A2,
4* E*1(,-)L1i1
56
K (2*i-1:2*i, 2*i-1:2*i) = K (2*i-1:2*i, 2*i-1:2*i) + [12*E*1(1,i)/L(1,i)A3, 6*E*1(1,i)/L(1,i)A2;
6*E*l(1,i)/L(1,i)A2, 4*E*1(1,i)/L(1,i)];
end
K (2*n-1:2*n, 2*n-1:2*n) = (12*E*1(1,n-1)/L(1,n-1)A3, -6*E*1(1,n-1)/L(1,n-1)A2; -6*E*1(1,n-1)/L(1,n-1)A2,
4*E*1(1,n-1)/L(1,n-1)];
for i = 2:n,
K (2*i-3:2*i-2, 2*i-1:2*i)
=
[-12*E*1(1,i-1)/L(1,i-1)A3, 6*E*1(1,i-1)/L(1,i-1)A2; -6*E*1(1,i-1)/L(1,i-1)A2,
2*E*1(1,i-1)/L(1,i-1)];
end
for i = 1:2*n,
for j = i:2*n,
K (j,i) = K (ij);
end
end
%Input exterior column related parameters
d = 5;%m, distance between the exterior columns
Ec = 2.05*1OA11; %pa, E of the columns
Ac = 1; %mA2, area of each column
%input outrigger related parameters
s_number = 2; %number of outriggers
H = zeros (1,snumber); %m, vertical heights from the ground of the outriggers
s_nodes = zeros (1,s_number);% locations of the springs on the nodes
s_nodes (1,1) = 26;%define each time when changing the locations of outriggers
s_nodes (1,2) = 51;%define each time when changing the locations of outriggers
%calculate the equivalent rotational stiffness of the outriggers
for i=1:snumber,
57
j=snodes(1,i)-1;
H (1,i) = L (1,j);
if j>1,
for step = 1:s-nodes(1,i)-2,
j = j-1;
H (1,i) = H (1,i) + L (1,j);
end
end
end
s_stiffness = zeros (1,s_number);%rotational stiffness of outriggers
for i = 1:snumber,
s_stiffness (1,i) = 1/(2*H(1,i)/(dA2*Ec*Ac));
end
%Form stiffness matrix with outriggers
for i = 1:snumber,
K (2*snodes(1,i),2*s_nodes(1,i)) = K (2*s_nodes(1,i),2*s nodes(1,i))+sstiffness (1,i);
end
%Form mass matrix
mass = zeros (1,2*n);
mass (1,1) = 106000;
mass (1,2*n-1) = 106000;
for i = 2:n-1,
mass (1,2*i-1) = 2*mass(1,1);
end
for i = 2:n-1,
mass (1,2*i) = 3*L(1,i-1)A3/12;
end
58
mass (1,2*n) = 3*(0.5*L(1,n-))A3/12;
m = diag (mass);
%Delete fixed degree of freedom from K and M matrix
K_new
m_new
=
=
K(3:2*n,3:2*n);
m(3:2*n,3:2*n);
%Obtain natural periods and mode shapes through eigenvalue analysis
[V,eigennew] = eig (Knew,mnew);
D = V;
for i=1:n-1,
del (i,1)=2*i;
end
D (del,:)=[]; %The mode shapes
eigen_1_new = sort(eigennew);
FundamentalPeriod = 2*pi/sqrt(eigenlnew(100,1));%The fundamental period
59