18.311 — MIT (Spring 2015) Answers to Problem Set # 03. Contents
advertisement
 Answers to Problem Set # 03. Contents")
18.311 — MIT (Spring 2015)
Rodolfo R. Rosales (MIT, Math. Dept., E17-410, Cambridge, MA 02139).
March 5, 2015.
Answers to Problem Set # 03.
Contents
1 ExID24. Check a pde implicit solution
1.1 ExID24 statement: Check a pde implicit solution . . . . . . . . . . . . . . . . . . . . . . . .
1.2 ExID24 answer: Check a pde implicit solution . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2
2
2 Linear 1st order PDE #15
2.1 Statement: Linear 1st order PDE #15 (ut + 2 t x ux = 4 t u; data on t = 0) . . . . . . . . . . .
2.2 Answer: Linear 1st order PDE #15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2
3
3 Linear 1st order PDE #16
3.1 Statement: Linear 1st order PDE #16 (ut + 21 x3 ux = −u; data on t = 0 and |x| ≤ 1) . . . . . .
3.2 Answer: Linear 1st order PDE #16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
3
4
4 Linear 1st order PDE #19
4.1 Statement: Linear 1st order PDE #19 (ut − 21 t2 x ux = 0; data on x = 1) . . . . . . . . . . . .
4.2 Answer: Linear 1st order PDE #19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
4
5
5 Haberman Book problem 57.01
5.1 Statement: Haberman problem 57.01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cars in a road . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Answer: Haberman problem 57.01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
5
5
6
6 Haberman Book problem 57.02
6.1 Statement: Haberman problem 57.02 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Explore a velocity field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Answer: Haberman problem 57.02 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
6
6
7
7 Problem 5803a
7.1 Problem 5803a. Calculating the car flux q from data . . . . . . . . . . . . . . . . . . . . . .
7.2 Problem 5803a. Answer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
8
8
8 Problem 6901a
8.1 Problem 6901a. Rate of change of the flux for a moving observer . . . . . . . . . . . . . . .
8.2 Problem 6901a. Answer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
9
9
1
18.311 MIT, (Rosales)
Check a pde implicit solution.
ExID24.
2
List of Figures
2.1
3.1
4.1
1
Solution of a 1st order linear pde for various times . . . . . . . . . . . . . . . . . . . . . . .
Characteristics of a 1st order linear pde . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Characteristics of a 1st order linear pde . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
4
5
ExID24. Check a pde implicit solution
1.1
ExID24 statement: Check a pde implicit solution
By direct substitution, show that
yields a solution to the equation:
u = f y − u2 ex ,
(1.1)
ux + 2 u2 uy = u.
(1.2)
Here f is an arbitrary function. Note that:
1. Equation (1.1) defines u implicitly. You have to find ux and uy by implicit differentiation.
2. Equation (1.2) is nonlinear.
1.2
ExID24 answer: Check a pde implicit solution
Taking the implicit derivative (with respect to y) in (1.1), we find
uy = ex (1 − 2 u uy ) G
where G = G(ξ) =
df
dξ
=⇒
uy =
ex G
,
1 + 2 ex u G
(1.3)
, and ξ = y − u2 . Similarly
ux = f y − u2 ex −2 u ux ex G
|
{z
}
=⇒
ux =
u
.
1 + 2 ex u G
(1.4)
=u
From (1.3) and (1.4) it follows that u satisfies (1.2).
2
Linear 1st order PDE #15
2.1
Statement: Linear 1st order PDE #15 (ut + 2 t x ux = 4 t u; data on t = 0)
Consider the following initial value problem, for −∞ < x < ∞,
ut + 2 t x ux = 4 t u,
with u(x, 0) =
x2
.
1 + x4
(2.1)
1. Use the method of characteristics to solve the problem. Write an explicit formula for the solution.
2. For any fixed x, what is the value of limt→∞ u?
3. Sketch the solution, as a function of x, for a few selected times.
4. What is the solution for arbitrary initial data, u(x, 0) = f (x)?
18.311 MIT, (Rosales)
2.2
Linear 1st order PDE #16.
3
Answer: Linear 1st order PDE #15
The characteristics for (2.1) are the curves satisfying the ode ẋ = 2 t x, with u̇ = 4 t u along each curve.
2
2
Thus x = c1 et and u = c2 e2 t , where c1 and c2 are constants. In particular, on the characteristic such
x2
1
that x = ξ when t = 0, u = f (ξ) (as given by the initial data f (x) = 1+x
4 ).
2
u = f (ξ) e2 t
2
along x = ξ et ,
for t ≥ 0 and any ξ.
2
2
Solving for ξ as a function of t and x in (2.2) yields the formula
u = f x e−t e2 t .
For the given f , this yields
x2
.
u=
1 + x4 e−4 t2
lim u = x2 .
Thus, for any x fixed,
t→∞
(2.2)
(2.3)
(2.4)
(2.5)
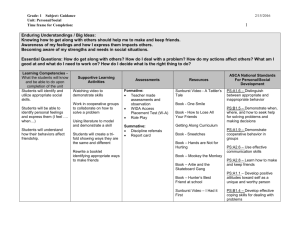
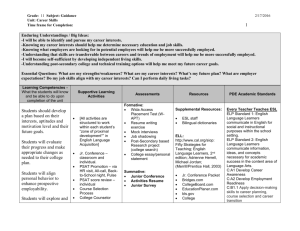
Plots of (2.4) for a few selected times can be seen in figure 2.1.
Solution for t = 0, 0.25, 0.40, 0.50, 0.58.
1
Figure 2.1: Linear 1st order pde #15. Plots of the
solution in (2.4), as a function of x, for a few selected times: t = 0 (blue), t = 0.25 (green), t = 0.40
(black), t = 0.50 (red), and t = 0.58 (magenta). The
pictures show how, for any finite range of x, the solution approaches a parabola as time grows. Nevertheless, for |x| large, the solution always decays.
0.8
u 0.6
0.4
0.2
0
−4
3
−2
0
x
2
4
Linear 1st order PDE #16
3.1
Statement: Linear 1st order PDE #16 (ut + 12 x3 ux = −u; data on t = 0 and |x| ≤ 1)
Consider the following problem in space-time
ut + 12 x3 ux = −u,
with u(x, 0) = f (x) given, for − 1 ≤ x ≤ 1.
(3.1)
1. Show that u = u(x, t), for t ≥ 1, is completely determined by (3.1). That is, for any −∞ < x < ∞
and t ≥ 1, u = u(x, t) can be written in terms of f using (3.1).
2. When 0 < t < 1, for which values of x is the solution determined by (3.1)? How about t < 0?
3. Let f (x) = x2 . In this case, write an explicit formula for the solution.
Hint: solve the equations for the characteristics, and write them as functions of time x = x(t). Then plot
the ones that start (time t = 0) from −1 ≤ x ≤ 1.
1
To understand what is going on, I strongly recommend that you draw the characteristic curves.
18.311 MIT, (Rosales)
3.2
Linear 1st order PDE #19.
4
Answer: Linear 1st order PDE #16
The characteristics for (3.1) are the curves satisfying the ode ẋ = 12 x3 , with u̇ = −u along each curve.
In particular, for the ones that start from −1 ≤ x ≤ 1, we have x = ξ and u = f (ξ) at t = 0 — where
−1 ≤ ξ ≤ 1. Thus
ξ
u = f (ξ) e−t along x = p
.
(3.2)
1 − ξ2 t
x
Solving for ξ as a function of t and x in (3.2) gives
u=f √
e−t .
(3.3)
1 + x2 t
For the given f , this yields
x2
e−t .
(3.4)
u=
1 + x2 t
However, this solution is not defined everywhere, but only where the characteristics reach.2 That is,
only on the points in space-time where x = √ ξ 2 , for some t ≥ 0 and −1 ≤ ξ ≤ 1. Thus:
1−ξ t
a. The solution is not defined for t < 0 (causality, here t is time).
1
1
≤x≤ √
.
b. For 0 ≤ t < 1 the solution is defined for − √
1−t
1−t
c. For t ≥ 1 the solution is defined for all x.
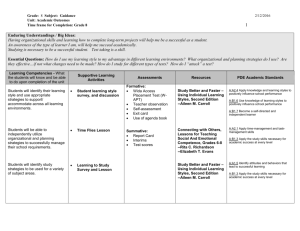
The key observation is that along any characteristic, x → sign(ξ) ∞ as t → 1/ξ 2 . This is illustrated by
the plots of a few selected characteristics in figure 3.1.
Selected characteristics with 0 ! " ! 1.
3
2.5
Figure 3.1: Linear 1st order pde #16. The characteristics, as given by the formula in (3.2), for a
few selected values of the parameter. Left to right:
ξ = 0, 0.25, 0.50, 0.60, 0.70, 0.80, 0.90, 1 (the characteristics for negative values of ξ are the reflections
of these across the t-axis). The pictures show how
x → ∞ as t → 1/ξ 2 .
2
t
1.5
1
0.5
0
4
0
2
4
x
6
8
10
Linear 1st order PDE #19
4.1
Statement: Linear 1st order PDE #19 (ut − 12 t2 x ux = 0; data on x = 1)
Consider the following signaling problem, for time −∞ < t < ∞,
ut − 12 t2 x ux = 0,
2
with u(1, t) =
This even though the formula in (3.4) makes sense for other points.
1
.
1 + t6
(4.1)
MIT, (Rosales)
Haberman Book problem 57.01.
5
1. Use the method of characteristics to solve the problem. Write an explicit formula for the solution.
2. Where is the solution defined by (4.1)?
Be careful here, as the formula you will obtain in item 1 gives values for a larger region.
3. Do a plot/sketch of a few selected characteristic curves.
4.2
Answer: Linear 1st order PDE #19
The characteristics for (4.1) are the curves satisfying the ode ẋ = − 12 t2 x, with u̇ = 0 along each curve.
In particular, consider the ones that go through the line x = 1, where the data is given. Then, for some
1
−∞ < τ < ∞, x = 1 and u = f (τ ) = 1+τ
6
3
3
at t = τ . Solving
u = f (τ ) along x = e(τ −t )/6 .
(4.2)
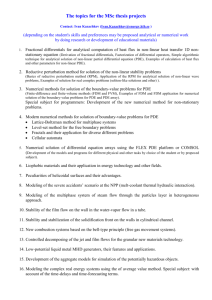
It is easy to see that, along these characteristics
x is a strictly decreasing function of t, as seen in figure 4.1. Further, we should use only t ≥ τ in (4.2)
(causality). Thus, solving for τ as a function
1/3 of t and x in (4.2) yields the formula
u = f t3 + 6 ln x
.
(4.3)
This solution is defined for 0 < x ≤ 1 only,
as this is the region that the characteristics in
1
(4.2) reach for t ≥ τ . For the given f , (4.3) yields
u=
.
(4.4)
3
1 + (t + 6 ln x)2
Selected characteristics with −3 ! " ! 3.
3
2
Figure 4.1: Linear 1st order pde #19. Plots of the
characteristics for a few selected values of −3 < τ < 3
(t = τ is where x = 1 along the characteristic). For
each characteristic: x → ∞ as t → −∞, and x → 0
as t → ∞. Furthermore, x is strictly decreasing on
the characteristics.
1
t
0
−1
−2
−3
5
5.1
0
1
2
3
x
4
5
6
Haberman Book problem 57.01
Statement: Haberman problem 57.01
Assume that there are an infinite number of cars (of infinitesimal length) on a roadway, each labeled
with a number β, ranging from β = 0 to β = 1 (let β = 0 correspond to the first car on the left, and
MIT, (Rosales)
Haberman Book problem 57.02.
6
β = 1 to the last car on the right.) Suppose that the car labeled β moves at a velocity u = 30 + 15 β (i.e.
dx/dt = 30 + 15 β) and starts at a position x(0) = β L.
(a) Show that the car’s velocities steadily increase from 30 to 45 as β ranges from 0 to 1.
(b) Show that the car’s initial positions range from 0 to L as β ranges from 0 to 1.
(c) Consider the car labeled β. Show that: x = (30 + 15 β) t + β L and u = 30 + 15 β.
(d) Eliminate β from these two equations to derive the velocity field
u=
5.2
15 x + 30 L
.
15 t + L
(5.1)
Answer: Haberman problem 57.01
∂u
= 15 > 0, and 0 ≤ β ≤ 1, this is fairly obvious.
∂β
(b) Since x(0) = β L and 0 ≤ β ≤ 1, this is fairly obvious.
(a) Since u = 30 + 15 β,
(c) Let x = x(t) be the position of the car labeled by β. Then the problem statement tells us that this
car has velocity u = 30 + 15 β, and that it starts at the position x(0) = β L. Thus x = x(t) satisfies
the simple O.D.E.
dx
= u = 30 + 15 β ,
dt
with initial condition:
x(0) = β L.
Solving this we get:
x = (30 + 15 β) t + β L,
(d) From the first equation in (5.2) we find β =
and u = 30 + 15 β.
(5.2)
x − 30 t
. Substituting this into the second equation, we
L + 15 t
obtain (5.1)
6
6.1
Haberman Book problem 57.02
Statement: Haberman problem 57.02
Suppose that the velocity field is given by
30 x + 30 L
.
15 t + L
(a) Determine the motion of a car that starts at x = L/2 at t = 0.
Hint: Why does dx/dt = (30 x + 30 L)/(15 t + L)? Solve this O.D.E. It is separable.
u=
(6.1)
(b) Show that u is constant along straight lines in the space–time plane, but the cars do not move at
constant velocity.
Is this a realistic velocity field?
MIT, (Rosales)
6.2
Haberman Book problem 57.02.
7
Answer: Haberman problem 57.02
(a) If a car is at position x at time t, then it has velocity u = u(x, t). Thus the car positions satisfy the
O.D.E.
dx
30 x + 30 L
=u=
.
(6.2)
dt
15 t + L
This O.D.E. can also be written in the form:
dt
dx
=
,
30 x + 30 L
15 t + L
(6.3)
which yields:
d
1
1
ln(30 x + 30 L) = d
ln(15 t + L) .
30
15
(6.4)
Thus
1
1
ln(30 x + 30 L) =
ln(15 t + L) + constant
30
15
30 x + 30 L = constant (15 t + L)2
=⇒
x = constant (15 t + L)2 − L =
=⇒
x(0) + L
(15 t + L)2 − L.
L2
(6.5)
In particular, for x(0) = L/2, we obtain:
x=
3
(15 t + L)2 − L.
2L
(6.6)
(b) Clearly, u = C = constant, with u given by equation (6.1), yields the straight lines
x=
1
C − 30
Ct+
L
2
30
in space–time. Thus u is constant along straight lines in the space–time plane. On the other hand,
the cars trajectories in space–time, as given by equation (6.5), are parabolas. Thus, the cars do not
move at constant velocity. In fact, we have:
dx
30 (x(0) + L)
=
(15 t + L).
dt
L2
(6.7)
Note that this last result shows that (6.1) is a fairly unrealistic velocity field, even though it looks as if
it is only a small variation of the velocity field derived in problem 57.01. The cars accelerate without
bound!
MIT, (Rosales)
7
Problem 5803a.
8
Problem 5803a
7.1
Problem 5803a. Calculating the car flux q from data
Consider the process of calculating the traffic flow q, from car “crossing times”, as follows:
At any road location x0 and time t0 , take the interval |t − t0 | ≤ 0.5 ∆t (∆t ”small”) and
count the number of cars, N , that cross through x = x0 . Then: q(x0 , t0 ) = N/∆t.
(7.1)
This definition depends on the choice of ∆t, but the idea is to take ∆t small, but large enough that N is
“large”. In this case, provided that the number of cars per unit time (flux) does not change too fast, a
“good” measurement of q can be obtained.
NOTE 1: Since cars are not points, the prescription in (7.1) has an un-resolved issue: What to do with
cars which do not fully cross through x = x0 during the counting interval. We could spend a lot of energy
on this issue, but, for the purpose of this problem, replacing the cars by points (e.g.: the position of their
front bumper) is good enough. In addition, when a “point” is at x = x0 right at the edge of the time
interval, do not count it. Fancier definitions will not change the basic point this exercise aims to illustrate,
but will succeed in making the problem harder, and the point behind it less obvious.
First, notice that the defined flux has a discontinuity every time an additional3 car is included — such
discontinuities appear as we either change ∆t, or move in space and/or time. QUESTIONS:
(a) What is the jump ∆q in the flux (i.e.: the magnitude of the discontinuity)?
(b) If cars are equally spaced (ρ = ρc = constant), and moving at constant speed (u = uc = constant),
how long must the measuring interval ∆t be so that the discontinuities in the flux are less than 5
percent of the flux? Namely: so that ∆q < 0.05 q. In this case, how many cars cross through x0 in
the time interval ∆t?
(c) What do the formulas you derived in b tell you when ρc = 50 cars per km and uc = 72 kph?
From item (b) a formula of the form ∆t > ∆c will follow — where ∆c depends on what size of error (i.e.:
the jumps in ∆q/q) you are willing to tolerate (in this problem 1/20). Let then T be a typical length scale
over which the traffic road conditions change. Then the continuum approximation, in which we replace
the cars by a density, will make sense as long as ∆c T .
NOTE 2: It is, in principle, possible that two cars may be added (or dropped) from the counting interval
in (7.1) as either of ∆t, t0 , or x0 changes. These situations are rare. For simplicity, ignore them in your answer.
7.2
Problem 5803a. Answer
(a) The definition in (7.1) gives a discontinuity of size ∆q = 1/∆t each time ∆t is increased (or
decreased) so that a new car is included in (or dropped from) the count. That is, when N → N ± 1.
(b) For a given flux q = qc = ρc uc , the relative size of the discontinuities in part (a) is given by
E=
∆q
1
1
=
≈ ,
qc
∆t qc
N
where we have used the definition of flux to conclude that the number of cars crossing through x0
in a time interval ∆t should be N ≈ ∆t qc . Thus, to make the discontinuities in the flux less than 5
percent of the flux (i.e.: E < 0.05) we need N ≈ qc ∆t > 20, which yields ∆c = 20/qc .
3
See note 2.
MIT, (Rosales)
Problem 6901a.
9
(c) In particular, ρc = 50 cars per km and uc = 72 kph yields qc = 3600 cars per hr = 1 car per sec. Thus
∆c = 20 sec.
The theory assumes that q is (basically) continuous,4 while (7.1) always produces (small) discontinuities.
This means that we need to “smear” the discontinuities before we plug the calculated/measured q into the
model. Below we describe an alternative process to obtain a flux q which is automatically smooth — an example
of the sort of stuff mentioned in note 1. IMPORTANT: The errors inherent in any discrete-to-continuum
transformation are not eliminated by the process below, they are merely hidden in the smoothing process!
Alternative construction of a flux: Associate every car with a localized density function
1
(x − xν )2
√
ρν =
,
exp −
`2
` π
(7.2)
where x = xν (t) is the car position, ν is a car label, and ` is a typical car length. Then define
q=
X
ν
ρν
dxν
.
dt
(7.3)
This is always smooth, but one can use this flux within the context of a continuum model only in the limit
where the continuum approximation is valid — that is T ∆c — see the problem statement.
8
Problem 6901a
8.1
Problem 6901a. Rate of change of the flux for a moving observer
Derive the formula that gives the rate of change of the flux for an observer moving with the traffic. The
formula has the form dq
dt = F (ρ, ρx ), where F is a function that you need to find, and the time derivative
dq
is from the observer’s point of view. Recall that q = Q(ρ), ρt + qx = 0, and c = c(ρ) = dρ
= wave speed.
The flux q here is the car flux as measured from the ground. What car flux q̃ does the observer see?
8.2
Problem 6901a. Answer
For an observer moving with the traffic, dx
dt = u. Thus, from the chain rule, and the equation ρt + qx = 0,
dρ
dx
dq
= c(ρ)
= c ρt +
ρx = c (−qx + u ρx ) = c (u − c) ρx ,
dt
dt
dt
which gives the desired formula. Finally, q̃ = 0, since the observer moves at the flux speed.
THE END.
4
We will see later that some discontinuities (shocks) are needed, but not one for every car!