Lecture 20: Noise Stability of Majority 1 Berry-Essen Theorem(CLT with error bound)
advertisement
")
Analysis of Boolean Functions
(CMU 18-859S, Spring 2007)
Lecture 20: Noise Stability of Majority
Mar. 29, 2007
Lecturer: Ryan O’Donnell
Scribe: Yi Wu
Today we are going to show Sρ (M ajn ) will converge to
1
2
π
arcsin(ρ) when n becomes big.
Berry-Essen Theorem(CLT with error bound)
Theorem 1.1 (simplified) Let x1 , x2 , ...xn be independent r.v.s, and we assume
• E(xi ) = 0
P
•
E(x2i ) = σ 2
• ∀i, |xi | ≤ ησ
P
Then xi is distributed like a gaussian N(0,σ 2 ) satisfies that
P
• ∀ intervals I ⊆ R, |Pr[ xi ∈ I] − Pr[N (0, σ 2 ) ∈ I]| < O(η)
P
• | E[ xi |] − E[N (0, σ 2 )]| ≤ O(η)
From the theorem we can see, if xi is some random bits, then
P
• |Pr([ √xin ∈ I] − Pr[N (0, 1) ∈ I] ≤ O( √1n )
q
P
• |E[| √nxi |] = π2 ± O( √1n )
P
P
If αi2 = 1, then |Pr([ xi αi ∈ I]) − Pr[N (0, 1) ∈ I]| ≤ O(max |αi |).
2
Calculating Majority’s Noise Stability
We want to calculate following value when n goes into infinity.
Sρ (M ajn ) = E[M ajn (x)M ajn (y)]
The expectation is taken over random bit x and y satisfying that y = x w.p. 12 + 12 p and y = −x
w.p. 12 − 12 p.
Essentially,
P
P
xi
yi
Sρ (M ajn ) = 1 − 2Pr[ √ , √ have different signs].
n
n
1
" P
#
xn
√
We can view P √yin as the sum of n two dimension vector
n
n
X
i=1
"
xi
√
n
yi
√
n
#
"
P
x
√ n
Pn
y
√ i
n
#
There is a two dimension Berry-Esseen Theorem. It is saying that
will converge to some
0
1 ρ
two dimension gaussian with mean
and covariance matrix
. More specifically, the
0
ρ 1
error bound will be as follows:
" Px #
√ i
1
0
1 ρ
2
n
P
√ )
∈ K) − Pr(N (
) ∈ K)| ≤ O( √
∀K ⊆ R , |Pr(
yi
0
ρ 1
√
1−ρ n
n
x
Here a random variable
y
ated by following process:
0
following distribution N (
0
1 ρ
) can be viewed as generρ 1
1. generating x ∼ N (0, 1)
p
2. generating y ∼ ρx + 1 − ρ2 N (0, 1)
We already have that
√ X √
yi / n has different sign]
xi / n,
1
x
0
1 ρ
=Pr(sgn(x) 6= sgn(y) for
∼ N(
)) + O( √
)
y
0
ρ 1
n 1−ρ
Sρ (M ajn ) =1 − 2Pr[
X
We only to understand the ρ p
correlated two dimensional gaussian.
Let u = (1, 0) and v = (ρ, 1 − ρ2 ) Let Z = (Z1 , Z2 ) be two independent gaussian. Then
x = u ∙ Z1 and y = v ∙ Z2 . Let Z 0 = (−Z2 , Z1 ) which is orthogonal to Z.
Then we have
Pr[x, y has the different sign] = Pr[ Z’ split u, v ] =
arccos(ρ)
arccos(u ∙ v)
=
.
π
π
Here we notice the fact that direction of Z 0 can be uniformly random from [0, 2π) and it only have
chance arccos(ρ)
to split u, v.
π
So overall, we have
Sρ (M ajn ) = 1 − 2
arccos(ρ)
1
2
1
) = arcsin(ρ) + O( √
)
+ O( √
π
π
n 1−ρ
n 1−ρ
2
1
0.8
0.6
0.4
S
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-1
-0.8
-0.6
-0.4
-0.2
0
rho
0.2
0.4
0.6
0.8
1
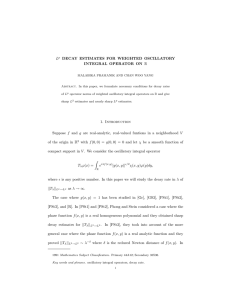
Figure 1: The curve
We plot the curve of π2 arcsin(ρ) as in Figure 1.
Further, when n is big, we would have
NSδ (M aj) = 12 − 12 S(1−2δ) (M aj)
1
= arccos(1 − 2δ)
π
2√
∼
δ
π
q
√
Recall by the Peres’s Theorem, NS(LT F ) ≤ ( π2 + Oδ (1)) δ. So Majority function does not
reach the bound.
It is a open question for odd n, whether any LTF f satisfies that
NSδ (f ) ≤ NSδ (M ajn ).
3
Majority is Stablest?
Theorem 3.1 Suppose f = sgn
P
αi xi . Here
Sρ =
P
αi2 = 1. Then
2
max |αi |
).
(arcsin ρ) ± O( √
π
1−ρ
3
Proof of the theorem is very similar to above.
Recall that it can be shown if
X
X
αi2 = 1.
f = sgn(
αi xi ),
Then
max Inf i (f ) = θ(max |αi |).
i
If f is LTF and Inf i (f ) is “small” for all i, then Sρ (f ) = π2 arcsin(ρ) + “small”.
We will show in later lecture that Majority function(or those small influence LTF) is the stablest
for function with small influence. Let us state the theorem more formally as follows.
Theorem 3.2 (“Majority is stablest”) Fix 0 < ρ < 1, Let f : {−1, 1}n → [−1, 1] satisfies
• E[f (y)] = 0
• Inf i f ≤ , for any i ∈ [n]
Or
• f is (, 1/log(1/)) quasirandom.
Then Sρ (f ) ≤
2
π
arcsin ρ + O(
loglog 1
)
log1
4