Suspension Control Arms for the Hope College Formula SAE Car

Suspension Control Arms for the Hope College Formula SAE Car
Ben Barkel
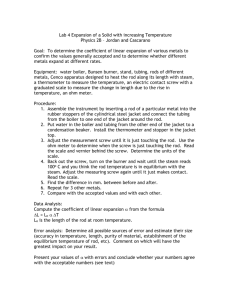
Completed Control Arm
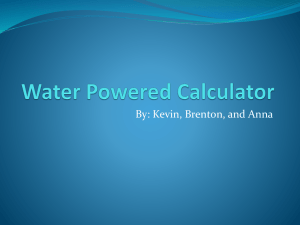
Detail of Spherical Bearing
Summary:
In any automotive application, the suspension plays a key role in properly handling
the dynamic and static loading as well as controlling the transient dynamic behavior. In particular, Formula SAE vehicles need a high level of performance within the suspension to be competitive. The control arms are structural components that fix each wheel in the desired number of degrees of freedom; in a double wishbone suspension, this generally means a four-link control arm, with a 5 th degree controlled by a tie rod from either the steering (in front) or a dead tie rod (in the rear). Each control arm has three connection points, two at the frame and one at the upright assembly. Since the tire can translate in the vertical direction, these must be able to pivot to allow this movement. The design also must allow quick and simple changing of the camber and caster angles, two important parameters to consider when setting up a car for a given track or driver.
In order to properly evaluate design options, a few basic dimensions of the vehicle needed to be defined. These included total weight (650lbf including driver), weight distribution (40/60% front/rear), wheelbase (1600mm), and tire specifications (Goodyear
G19 Eagles). From there, statics can be used to determine maximum forces applied at all points in the suspension, which can then be used to set up a Finite Element model to evaluate materials, design geometries, etc.
The basic geometry of the control arms was already defined, using OptimumK kinematic software. Several designs were considered for adjustment of camber and caster.
The first was to use a threaded rod end at the outboard point, which could be threaded in and out to adjust the camber angle. While this would be a simple design, it was deemed structurally inadequate due to the high bending moments that would be applied to the threads of the rod end. Therefore, it was decided that a captured spherical bearing would be used, which would be bolted to a mount on the upright. Camber would then be adjusted using small aluminum shims in between the upright and the mount. Caster would be adjusted by two threaded rod ends at the inboard points, which would allow adjustment without causing any additional internal stresses.
An FEA model was set up using ANSYS 12.0. Several tube sizes and materials were evaluated, and it was concluded that 0.75”x0.049” chromoly steel tubing would be the best solution. Chromoly steel is common in motorsport and aerospace applications and is extremely weldable, as well as having an excellent strength to weight ratio. It was determined that in the most extreme loading possible, the weakest control arm would have a factor of safety of 1.7. This is appropriate for a racing vehicle, as it’s strong enough without adding extra weight, which is detrimental to performance. Chromoly gusset plates were also welded on to provide extra structural support, as well as providing a platform for a pushrod mount. The rod ends at the inboard points are threaded into the tubing via chromoly tube adapters, which were machined separately and welded into the tubing. The spherical at the outboard point was press fit into a laser cut clevis, which itself was press fit into the tubing and welded in place. All components were TIG welded for precision, however this will necessitate normalization via heat treating. All control arms will be heat treated to approximately 870deg C in order to normalize the material to avoid brittleness in the heat affected zones