Rough notes for Maths 543 Lecture 2
advertisement

Rough notes for Maths 543
Please send corrections and comments to Conor Houghton: houghton@maths.tcd.ie
Lecture 2
Before going any further it is useful to formalize the discussion of homotopy with some
definitions. First, a based loop on a topological space X, based at x0 , is a map
α : [0, 1] ,→ X
t ∈ [0, 1] 7→ α(t)
such that α(0) = α(1) = x0 .1 It is easy to define the product of two loops:
α(2t)
0 ≤ t ≤ 21
γ(t) =
β(2t − 1) 21 ≤ t ≤ 1
(1)
(2)
This might seem to be an unpleasant definition since it requires the product loop will be
of a very particular form, it returns to the base-point half way around. Of course, when
we come to study equivalence classes of loops under homotopy, this won’t be a problem, a
generic representative of the homotopy class of the product loop will not have that peculiar
form. We can also define the constant loop
c(t) = x0
(3)
α−1 (t) = α(1 − t)
(4)
and the inverse of a loop.
It is possible to study the space of based loops on a space, this is an important and
difficult subject which owes some of its importance to string theory. The space of loops on
a group is itself a group called the loop group2 and is the subject of a book by Priestley and
Segal. The loop space is difficult to study because it is infinite dimensional, a more common
and more elementary space is arrived at by quotienting the loop space by homotopy. As
we will see this space is a group called the fundamental group.
Two loops α and β based at the same point x0 are homotopic of there exists a
continuous map
H : [0, 1] × [0, 1] ,→ X
(5)
such that
H(t, 0) = α(t)
0≤t≤1
H(t, 1) = β(t)
0≤t≤1
H(0, s) = H(1, s) = x0 0 ≤ s ≤ 1.
(6)
1
It seems peculiar to define a mapping from S 1 into X in terms of the map of an interval with the
basing restriction, the point of this is that for basing we want a circle with a beginning and an end.
2
I’m not quite sure of the exact statement of that result.
1
H has two variables, the first, t, is a loop variable and the second, s, is a deformation
parameter. For s = 0, H is just the loop α, when s = 1, it is the loop β and, so, as s is
changed α is deformed to β. In other words, H can be regarded as a one parameter family
of loops interpolating between α and β. Since H is a continuous map, this deformation
is continuous. Thus, two maps are homotopic if one can be deformed into the other. For
convenience the deformation is required to keep the base point fixed.
Since homotopy is an equivalence relation3 it makes sense to quotient the space of based
loops by homotopy and consider classes of loops. In other words, [α] is the equivalence
class of all loops homotopic to α. α itself is a representative of the class. The space has
a group structure derived from the group structure on the space of loops,
[α][β] := [αβ].
(7)
Obviously to show this is a group structure you must first show that it is well defined4
and then you must show that it is a group structure, in other words, that it is associative,
closed and it has inverse and identity.5 It is easy to check these things, they are also in
Nash and Sen or Nakahara. The group is denoted π1 (X, x0 ) and is called the fundamental
group.
Some theorems
The first thing to observe is that, though the base point was essential to the definition,
it allowed us to multiply loops, the group itself doesn’t depend on the base point. If it
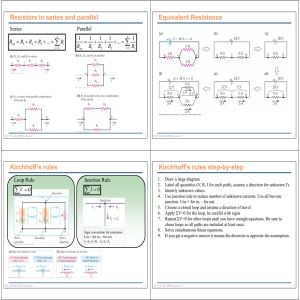
did, the fundamental group wouldn’t be so useful.6 If x and y are both points in a pathwise connect topological space, X, then the fundamental groups π1 (X, x) and π1 (X, y) are
isomorphic. The isomorphism is illustrated by Fig.1 and is defined relative to a path γ
between x and y. It is [α] ↔ [γ −1 αγ]. Again, Nash and Sen should be consulted for details.
Isomorphism under change of basepoint only goes part way towards establishing the
usefulness of the fundemental group. What is really important is that the fundemental
group is a homeomorphism invariant. Thus, two homeomorphic spaces have the same fundemental group and so knowing what the fundemental group of a space is means knowing
3
1. a ∼ b ⇐⇒ b ∼ a 2. a ∼ a and 3. a ∼ b and b ∼ c ⇒ a ∼ c
That is, α ≡ α0 and β ≡ β 0 implies αβ ≡ α0 β 0 .
5
By the way, a := b reads a is defined as being equal to b.
6
In fact, what follows is true of a path-wise connect space. A path-wise connect space is a space in
which any two points are connected by a path, that is, for x ∈ X and y ∈ X there exist a continuous map
p : [0, 1] ,→ X such that p(0) = x and p(1) = y. This just means that the space comes in one piece, if it
comes in more pieces you have to treat each piece separately. If a space, X, is path-wise connected it is
said that π0 (X) = 0 because the path p is like a homotopy between points, in otherword, the loops in the
previous definition of homotopy have been replaced by points. This does suggest that the group π 1 (X, x0 )
can be generalized to πn (X, x0 ) and indeed we will see this is the case: π2 (X, x0 ) is the group of homotopy
classes of maps from a two-sphere into X. There is a problem with π0 (X) in this regard, it doesn’t have
a group structure. The difference between a connected (no open subspaces are closed) and a path-wise
connected space is fun but uninteresting.
4
2
α
β
γ
r
r
x
γ
−1
y
Figure 1: The isomorphism between two fundemental groups differing by basepoint is given
by the path.
something about the topology of the space.7 The isomorphism between the fundemental
groups two homeomorphic spaces is derived from the homeomorphism itself. Thus, if X
and Y are homeomorphic pathwise connect topological space’s there exists a continuous
map f : X → Y . Without loss of generality, let f (x) = y and then define a map f ∗ on
based loops using f ∗ (α)(t) = f (α(t)). This map is well defined on homotopy classes and
gives an isomorphism between π1 (X, x) and π1 (Y, y).8
An example: the annulus
(i)
(ii)
x
(iii)
x
x
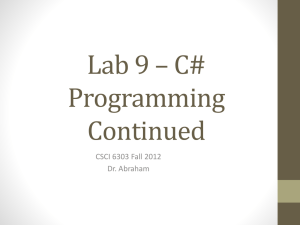
Figure 2: A loop which is homotopic to the constant loop.
It is useful to look at an example. Let us consider the annulus, A = {(x, y) ∈ R2 |a ≤
x2 + y 2 ≤ b}. By examining the figures, Fig. (2) and Fig. (3) it should be easy to convince
yourself that π1 (X, x) = Z and that each classes is just labelled by the number of times it
goes around the hole in the middle. In cases like this when X has fundamental group Z it
7
This statement is not quite true, homotopy groups are quite hard to calculate unless it is easy to see
what the homotopy is, thus, in fact, homotopy is a useful language for discussing a particular aspect of a
spaces topology, rather than a useful calcualtional device. There is another group, the homology group,
which is easier to calculate. This will be discussed in due course.
8
Again, details are in Nash and Sen, where a stronger version of this theorem is proved. They prove
that two homotopic spaces have the same fundemental group. Two spaces X and Y are homotopic is
there exist continuous maps f : X → Y and g : Y → X where g ◦ f : X → X and f ◦ g : Y → Y are
homotopic to the identity.
3
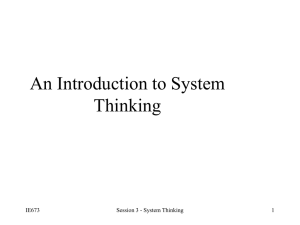
is common to refer to the integer labelling the homotopy class of a loop as the winding
number. This makes sense since the since the winding number of a loop tells us how
many times the loop winds around the hole. Thus, the loops in Fig. (2) all have winding
number zero, the loops in Fig. (3)(i) and Fig. (3)(ii) both have winding number one. The
loop in Fig. (3)(iii) has winding number two.
(i)
x
(ii)
(iii)
x
x
Figure 3: (i) and (ii) are homotopic, but are not homotopic to the constant loop. The
loop in (iii) is homotopic to the multiple of the loops in (i) and (ii). It is not homotopic to
either of them, nor to the constant.
(i)
x
(ii)
(iii)
x
x
Figure 4: A loop with winding number one multiplied by a loop with winding number
minus one has winding number zero and is homotopic to the constant loop.
It is interesting to note that the annulus and the circle have the same fundemental
group. In fact, a circle is a deformation retract of the annulus and it is generally true
that homotopy is invariant under deformation retract. A retract is a map sending a space
to a subset of itself and restricting to the identity on the subset, so, if Y ⊂ X the map
r : X → Y is a retract provided r(y) = y for any y ∈ Y . A deformation retract is
a deformation of a space to a subspace, Y ⊂ X is a deformation retract if the exists a
continuous map H : X ×[0, 1] → Y so that H(x, 0) = x, H(x, 1) is a retract and H(y, t) = y
for all y ∈ Y .9
9
A slightly confusing question is weither the circle is a deformation retract of the punctured plane
R \ (0, 0). I think it is, with, using complex coordinates, a deformation retract given by, for example,
H(z, t) = z/(1 − t + t|z|).
4
The torus and product manifolds
The torus T 2 has two winding numbers: π1 (T 2 ) = Z ⊕ Z. By examining Fig. (5) it is
easy to see that there are two ways to wind around a torus. What is less obvious is that
the group is commutative.10 This is proved graphically in Fig. (6) and also follows from
the fact that T 2 = S 1 × S 1 . homotopy has nice properties under Cartesian product. If X
and Y are two pathwise connected topological space π1 (X × Y ) = π1 (X) ⊕ π1 (Y ). The
isomorphism is given by the two projection maps p1 (x, y) 7→ x and p2 (x, y) 7→ y. These
give maps on the loop space p∗1 (α)(t) = p1 (α(t)) and so on. Details are in Nash and Sen.
βα
α
αβ
β
Figure 5: Some loops on a torus. Opposite edges are identified to form the torus
Figure 6: The homotopy between αβ and βα is easy to see if you slip part of the loop
around the torus.
A winding number in string theory
Since homotopy theory deals with loops, it is not suprising that winding numbers occur in
string theory. String theory is a particle theory model in which the fundemental objects
are one-dimensional. Thus, unlike a normal particle theory in which a particle trajectory
is a map of a line into spacetime, a string trajectory is a map from a cylinder, S 1 × R, or
sheet, [0, π] × R, into spacetime. It is a map of a cyclinder if the string is a loop: a closed
string, and it is a map of a sheet if the string has two ends: an open string.
It is not immeadiately obvious what action should be used in string theory or what
equations of motion the trajectory should satisfy. There are complex and interesting issues to understand relating to the reparameterization invariances. What happens is that
10
Don’t think that all fundemental groups are Abelian, an obvious counter example is the plane with
two punctures. This example will be discussed later.
5
the obvious area minimizing action is diffiuclt to use and is replaced by a more tractible
action which reduces to it under the imposition of a constraint. The quantum mechanical
imposition of this constraint is very delicate and rich.
For our purpose here we simply note the maps obey the wave equation. σ and τ are
coordinates on the world sheet,11 and they map to a point in space time with coordinates
X µ (σ, τ ). For a closed sting X µ (σ + 2π, τ ) = X µ (σ, τ ). The coordinates then satisfy
∂2
∂2
− 2 + 2 Xµ = 0
(8)
∂τ
∂σ
In the usual way the wave equation is satisfied by any linear superposition of a left and
right moving part: X µ (σ, τ ) = X+µ (σ+ ) + X−µ (σ− ) where σ± = τ ± σ. These left and right
moving parts can be expanded in a Fourier series:
1 µ 1 µ
i X αnµ
x + lα0 σ+ + l
exp (−inσ+ )
2
2
2 n6=0 n
i X α̃nµ
1 µ 1 µ
x + lα˜0 σ− + l
exp (−inσ− )
X− (σ− ) =
2
2
2 n6=0 n
X+ (σ+ ) =
(9)
where l is the length of the string and the periodicity condition in σ means that α0µ = α̃0µ .
Note that
X µ = xµ + lα0µ τ + left and right moving oscillators
(10)
and so xµ is the position and pµ = 21 l2 α0µ is the momentum. In string theory these expansions are substituted into the canonical commutation relations for X µ . It is found that αnµ
and α̃nµ are creation and annihilation operators for modes on the string and so the string
carries excitations. Different excitations are thought to correspond to different particles.
It is also found that xµ and pµ satisfy the Heisenberg relation, [xµ , pν ] = ig µν .
One peculiar feature of string theory is that the constraints mentioned earlier can only
be consistently applied if space-time has 26 dimensions.12 It is thought that the excess
dimension beyond the four or whatever we experience may be compactified, that is, spacetime may be a product between the four obvious dimensions and a compact manifold. The
idea is that the compact manifold may be very small and therefore invisible.13 This is
called compactification.
The easiest example of compactification is to wrap one of the dimensions around a
circle or radius R. Choosing µ = 25 to compactify on, X 25 = X 25 + 2πR and x25 is now
an angular variable. For convenience the space-time index will be left out for a while so
11
The world sheet is the sheet or cylinder which is mapped into spacetime. In the same way a particle
has a world line.
12
Or ten in the fermionic theory.
13
Just how small that manifold may be is an interesting question, it was always thought it had to be
Planck scale, that is, very small indeed, but modern speculation has it much larger, there is no physical
reason to rule out one of the extra dimensions being as large as half a millimeter provided only gravitons
can proagate in that dimension.
6
∂
. Thus a
we write x for x25 and so on. Now [x, p] = i and so, in the normal way, p ≡ − ∂x
momentum eigenstate is given by exp (ikx). Now, normally there is no constraint on the
eigenvalue k but here there is because x is an angle. This means k = m/R for m ∈ Z.
This isn’t all, because X is an angle, it is not longer the case that α0 must be the same as
α̃0 , they can differ by nR/l where n ∈ Z. Solutions to the wave equation then become
1
X(σ, τ ) = x + nRσ + l2 pτ + oscillator terms
2
(11)
and as σ goes from 0 to 2π we go once around the string and n times around the circle which
is the 25th dimension. In other words n is the winding number for π1 (S 1 ). Furthermore,
the left and right momenta are no longer equal
X(σ, τ ) = X+ (σ+ ) + X− (σ− )
1
1
X+ =
x + l2 p+ σ+ + oscillator terms
2
2
1
1
x + l2 p− σ− + oscillator terms
X− =
2
2
(12)
with
m
nR
+ 2
2R
l
nR
m
− 2 .
=
2R
l
p+ =
p−
(13)
The momenta are labelled by two integers, one of which is topological and one of which
arising during quantization.
The particles in the spectrum are labelled by these integers and by the excitation
numbers of the oscillators. The amazing thing is that this spectrum is invariant under
R → l2 /2R. There is a matching between two different theories, one with compactification
radius R and the other with compactification radius l 2 /2R. The spectra match but only
if the number m and n are swapped, a winding number n state in one theory is match ed
with a k = m/R state in the other theory. The matching swaps a topological number for a
number arising in quantization. This is a strange and provocative feature of compactified
string theory. It is known a T-duality. The T stands for target as in target space.
7