Efficient Resource Sharing in Concurrent Error Detecting Superscalar Microarchitectures
advertisement

Appears in the 37th Annual IEEE/ACM International Symposium on Microarchitecture
Efficient Resource Sharing in Concurrent Error Detecting Superscalar
Microarchitectures
Jared C. Smolens, Jangwoo Kim, James C. Hoe, and Babak Falsafi
Computer Architecture Laboratory (CALCM)
Carnegie Mellon University, Pittsburgh, PA 15213
{jsmolens, jangwook, jhoe, babak}@ece.cmu.edu
http://www.ece.cmu.edu/~truss
Abstract
Previous proposals for soft-error tolerance have called
for redundantly executing a program as two concurrent
threads on a superscalar microarchitecture. In a balanced
superscalar design, the extra workload from redundant
execution induces a severe performance penalty due to
increased contention for resources throughout the
datapath. This paper identifies and analyzes four key
factors that affect the performance of redundant execution,
namely 1) issue bandwidth and functional unit contention,
2) issue queue and reorder buffer capacity contention, 3)
decode and retirement bandwidth contention, and 4)
coupling between redundant threads' dynamic resource
requirements. Based on this analysis, we propose the
SHREC microarchitecture for asymmetric and staggered
redundant execution. This microarchitecture addresses the
four factors in an integrated design without requiring
prohibitive additional hardware resources. In comparison
to conventional single-threaded execution on a state-ofthe-art superscalar microarchitecture with comparable
cost, SHREC reduces the average performance penalty to
within 4% on integer and 15% on floating-point SPEC2K
benchmarks by sharing resources more efficiently between
the redundant threads.
1. Introduction
A soft error occurs when the voltage level of a digital
signal is temporarily disturbed by an unintended mechanism such as radiation, thermal, or electrical noise. Previously, soft errors have been a phenomenon associated with
memory circuits. The diminishing capacitance and noise
margin anticipated for future deep-submicron VLSI has
raised concerns regarding the susceptibility of logic and
flip-flop circuits. Recent studies have speculated that by the
next decade, logic and flip-flop circuits could become as
susceptible to soft errors as today's unprotected memory
circuits [6,8,18]. In light of increasing soft-error concerns,
recent research has studied the soft-error vulnerability of
the microarchitecture as a whole [11]. A number of studies
have investigated ways to protect the execution pipeline by
means of concurrent error detection; this protection
requires 1) instructions to be executed redundantly and
independently and 2) the redundant outcomes to be compared for correctness. Among recent studies, a popular
approach has been to leverage the inherent redundancy in
today’s high-performance superscalar pipelines to support
concurrent error detection [10,13,14,15,16,20].
Performance Penalty. A minimally modified superscalar
datapath can support concurrent error detection by executing an application as two independent, redundant threads.
A drawback of this approach is that the doubled workload
from redundant execution incurs a significant IPC penalty
on superscalar datapaths tuned for single thread performance. Understandably, an application that achieves high
utilization and high IPC as a single thread on a given
superscalar datapath will saturate the available resources
and lose performance when running as two redundant
threads on the same datapath. More interestingly, however,
applications with low IPC as a single thread can still perform poorly as two redundant threads, despite the apparently ample resources to support both low-IPC threads. In
this paper, we explain the performance bottlenecks that
contribute to this paradoxical behavior and offer a microarchitecture design that improves redundant execution performance in these cases.
Performance Factors. We study four factors in superscalar datapath design that affect the performance of redundant execution. The first three factors represent the
different resources that support high performance execution. The factors are 1) issue and functional unit bandwidth, 2) issue queue (ISQ) and reorder buffer (ROB)
capacity, and 3) decode and retirement bandwidth. Our
analysis indicates that the bottleneck imposed by forcing
two redundant threads to share issue and functional unit
bandwidth has a first-order effect on performance. However, in the cases where issue bandwidth is not clearly saturated, sharing the ISQ and ROB between two threads—
effectively halving the out-of-order window size—also
imposes a significant performance bottleneck, particularly
in floating-point applications. Decode and retirement bandwidth may be a performance limiting factor for microarchitectures that fetch or decode instructions redundantly. The
fourth factor in this study is a design choice of whether to
allow the progress of two redundant threads to stagger elastically. Staggered re-execution has been previously shown
effective [9,15,16,20]. Our analysis further shows that the
effects from allowing stagger and relieving the ISQ and
ROB contention are independent and can be combined to
achieve better performance than either factor alone.
SHREC Microarchitecture. SHREC (SHared REsource
Checker) is an efficient concurrent error detection microarchitecture that requires only limited modifications to a conventional superscalar microarchitecture. SHREC employs
asymmetric redundant execution to relieve the sharing
pressure on ISQ and ROB capacity without physically
enlarging those structures. It is also naturally amenable to
permitting an elastic stagger between redundant executions
of the same instruction. Our evaluation shows that asymmetric redundant execution and stagger together enable
SHREC to more efficiently utilize available issue bandwidth and functional units, thus reducing the performance
impact of sharing between two redundant threads. Assuming a comparable state-of-the-art baseline superscalar
microarchitecture, SHREC reduces the average performance penalty of redundant execution to within 4% on
integer and 15% on floating-point applications. This performance is in comparison to prior proposals that experience an IPC loss of 15% on integer and 32% on floatingpoint applications.
Related Work. In asymmetric redundant execution, an
instruction is only checked after the second execution
using input operands already available from the first execution. This idea has been proposed previously by Austin in
the DIVA microarchitecture [2]. In DIVA, the initial execution and the redundant instruction checking do not share
issue and functional unit bandwidth; a second dedicated set
of functional units is added to the checker. In this study, we
assume the resource configuration of the underlying superscalar microarchitecture is fixed by technology and market
forces and cannot be easily increased. Therefore, the initial
execution and redundant checking in SHREC share the
same set of functional units. An important issue addressed
in our study is whether functional units can be shared efficiently.
Previously, Mendelson and Suri proposed the O3RS
approach for redundant execution of register update unitbased (RUU) superscalar microarchitectures [10]. Redundant execution of the same instruction is initiated from the
same RUU entry (from the same ISQ and ROB entries in
the context of recent superscalar microarchitectures). This
is another way to resolve the sharing pressure on ISQ and
ROB capacity. However, the O3RS approach is not amenable to supporting stagger between redundant executions
because the ISQ and ROB occupancy times would be necessarily increased (entries are held until the second execution). Without stagger, O3RS cannot fully capture the
performance opportunity available to SHREC. Conversely,
staggered execution has been shown to be effective in
improving performance in several SMT-based concurrent
error detection designs, but these proposals do not address
the bottleneck imposed by sharing ISQ and ROB capacity.
In Section 3, we present more detailed analysis and comparison of designs that only support staggered re-execution
or only resolve the ISQ and ROB bottleneck.
Contributions. This paper offers two key contributions:
• We investigate and explain the performance behavior of
redundant execution on superscalar microarchitectures.
• We propose the SHREC soft-error tolerant superscalar
microarchitecture, which maximizes the performance
of redundant execution with minimized changes to a
conventional baseline superscalar microarchitecture.
Paper Outline. This paper is organized as follows.
Section 2 provides background and defines assumptions
regarding our baseline superscalar microarchitecture and
redundant execution superscalar microarchitecture.
Section 3 presents a factorial analysis of key design
choices impacting the performance of redundant execution
on superscalar microarchitectures. Section 4 describes and
evaluates SHREC. We offer our conclusions in Section 5.
2. Baseline Microarchitectures
In this section, we first define our assumptions about the
baseline superscalar microarchitecture. Next, we explain
previous soft-error tolerance proposals that extend superscalar microarchitectures to redundantly execute a program
as two concurrent threads. Finally, we establish the performance penalty associated with the prior proposals.
2.1. SS1: Baseline Superscalar Microarchitecture
The starting point of all soft-error tolerant designs in
this paper is a balanced superscalar speculative out-oforder microarchitecture. In this paper, we assume a conventional wide-issue design where:
1.
2.
architectural register names are renamed onto a physical register file
an issue queue (ISQ) provides an out-of-order window
for dataflow-ordered instruction scheduling to a mix
of functional units (FUs)
Exception
Phys RegFile
Phys RegFile
ISQ
Retirement
FUs
(a)
Rename/
Decode
ROB
Fetch
Retirement
FUs
Rename/
Decode
Fetch
ISQ
ROB
(b)
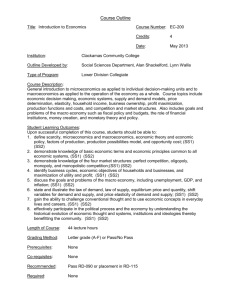
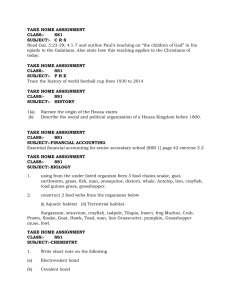
FIGURE 1. The (a) SS1 baseline superscalar and (b) SS2 redundant execution microarchitectures.
TABLE 1. Baseline SS1 parameters.
3.
4.
OoO Core
128-entry ISQ, 512-entry ROB, 64-entry
LSQ, 8-wide decode, issue, and retirement
Memory
System
64K 2-way L1 I/D caches, 64-byte line
size, 3-cycle hit, unified 2M 4-way L2, 12cycle hit, 200-cycle memory access, 32 8target MSHRs, 4 memory ports
Functional
Units
(latency)
8 IALU (1), 2 IMUL/IDIV (3/19), 2 FALU
(2), 2 FMUL/FDIV (4/12), all pipelined
except IDIV and FDIV
Branch
Predictor
Combining predictor with 64K gshare,
16K/64K 1st/2nd level PAs, 64K meta
table, 2K 4-way BTB, 7 cycle branch
misprediction recovery latency
a reorder buffer (ROB) tracks program order and execution status for all in-flight instructions
a load/store queue (LSQ) holds speculative memory
updates and manages out-of-order memory operations
Figure 1(a) shows the layout of the baseline microarchitecture with the key datapath elements and their interconnections. Table 1 lists the salient parameters assumed for
this paper. We refer to this reference microarchitecture configuration as SS1. SS1 nominally is an 8-way superscalar
design. The settings in Table 1 are extrapolated from the
Alpha EV8 [7].1 Overall, SS1 should reflect an aggressive
superscalar design that pushes today’s state-of-the-art.
Consequently, we assume the parameters in Table 1 cannot
be increased further without substantial cost. For instance,
the functional units in the EV8 occupy a substantial
amount of die area, similar in size to 1MB of L2 cache
storage [12].
We assume all memory arrays in SS1 (such as register
files, caches and TLBs) are protected against soft errors by
error correcting codes (ECC). The storage overhead to protect a 64-bit value with single error correction, double error
detection ECC is roughly 13%. We assume the instruction
fetch stages are protected by circuit-level soft-error toler1. Although EV8 is an SMT, it is emphasized that EV8 is tuned for single-threaded superscalar execution.
ance techniques; these in-order stages can be more deeply
pipelined to overcome the associated performance overhead. We assume circuit-level techniques are also responsible for protecting non-performance critical portions of the
datapath (e.g., memory management state machines). The
main focus of this paper is on providing soft-error protection for the out-of-order pipeline. Neither ECC nor circuitlevel techniques are applicable within the out-of-order
pipeline due to the pipeline’s structural complexity and
extreme sensitivity to the critical path delay.
2.2. SS2: Symmetric Redundant Execution
Register renaming and dataflow-driven execution in an
out-of-order pipeline enable fine-grain simultaneous execution of two independent instruction streams—this is the
key premise behind the simultaneous multithreading
approach [19]. Figure 1(b) illustrates a simple approach to
execute a program redundantly as two data-independent
threads for concurrent error detection [14]. The key
changes from SS1 are concentrated in the decode and
retirement stages. In Figure 1(b), the instruction fetch
stream is duplicated into an M-thread (main thread) and an
R-thread (redundant thread) at the decode stage. Register
renaming allows the M- and R-threads to execute independently between the decode and the retirement stages. This
portion of the pipeline operates identically to SS1, with the
exception of memory instructions. Load and store
addresses are calculated redundantly. The memory access
required by a load instruction is only performed by the Mthread. The returned load value is buffered in a load-value
queue [15] for later consumption by the corresponding load
instruction in the R-thread. This structure ensures that two
executions of the same load instruction result in the same
load value. In the retirement stage, the redundantly computed results of the duplicated instructions are checked
against each other in program order. If an error is detected,
program execution can be restarted at the faulty instruction
by triggering a soft-exception. We refer to this 2-way symmetric redundant superscalar pipeline as SS2.
Although SS2 is based on a superscalar datapath, the
SS2 discussion in this paper is also applicable to SMTbased designs that fully re-execute a program as two data
independent threads (e.g., AR-SMT [16], SRT [15], Slip-
6
Low High
5
4
4
IPC
5
3
SS2
SS1
1
1
0
0
Av
er
A
Av age ve
er (L rag
ag o
e
e wo
(H n
ig ly)
h
on
ly)
eq
ua
k
fm e
a3
d
lu
ca
fa s
ce
re
c
sw
im
m
gr
id
ap
pl
ar u
t-1
1
am 0
wu mp
pw
is
ga e
lg
six el
tra
ck
m
es
a
ap
si
2
Av
er
Av
a
er
Av ge
a
er (Lo ge
ag
w
e
on
(H
l
ig y)
h
on
ly)
Low High
3
2
g
vp ap
r-r
ou
te
pa
rs
er
bz
tw
ip
ol
2f
s
pe ourc
rlb
e
m
kgz
di
ip
-g ff
ra
ph
gc ic
c16
6
eo
n- craf
ru
ty
sh
m
vo eie
rte r
xon
e
IPC
6
(a) Integer
(b) Floating-point
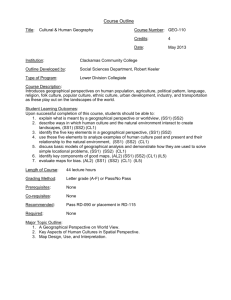
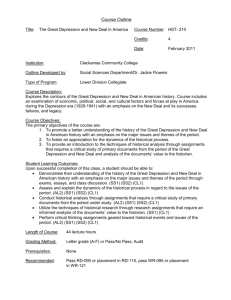
FIGURE 2. Performance impact of redundant execution on SS2.
stream [13]). A key commonality between them is the
resource pressure from concurrently supporting two
threads. We assume SS2 has the same level of resources as
SS1 (Table 1). For every instruction executed in SS1, not
only must the instruction use functional units twice in SS2,
but the instruction must also consume twice the bandwidth
throughout the SS2 pipeline (i.e., decode, issue, writeback
and retirement). Furthermore, each instruction also occupies two separate entries in SS2’s ISQ and ROB, effectively halving the out-of-order execution window size.
2.3. SS2 Performance Penalty
Figure 2 reports the IPC of SPEC2K benchmarks from
executing their corresponding SimPoints [17] on cycleaccurate performance simulators of SS1 and SS2.
Throughout this paper, we report performance results
based on 11 integer and 14 floating-point SPEC2K benchmarks1 running their first reference input. To estimate IPC
for each benchmark, we simulate an out-of-order core and
measure IPC for up to eight 100-million-instruction SimPoint regions (as published in [17]) that are supposed to be
representative of the benchmark’s complete execution
trace. We follow SimPoint’s prescribed procedure to
weight and combine the IPCs of individual SimPoint
regions to estimate the entire application’s average IPC.
Average IPCs over multiple benchmarks are computed as
harmonic means.
The performance simulators used in this paper are
derived from the sim-outorder/Alpha performance simulator in Simplescalar 3.0 [4]. For this study, we modify simoutorder’s stock RUU-based model to support the issue
1. We exclude the integer benchmark mcf from our study because it is
insensitive to all design parameters in this paper; its IPC is within 1% of
0.17 for all experiments.
queue-based SS1 datapath shown in Figure 1, MSHRs and
memory bus contention. Unless otherwise noted, the configuration in Table 1 is used consistently in this paper.
Graphs (a) and (b) in Figure 2 separately report the IPCs
of integer and floating-point benchmarks. In each graph,
the benchmarks are sorted according to their SS1 IPC. The
benchmarks are further divided into high-IPC versus lowIPC subsets; each graph is summarized in terms of the
overall average IPC as well as separate averages of the
high-IPC and low-IPC subsets. Overall, the SS2 IPC is
15% lower than SS1 for integer benchmarks and 32%
lower for floating-point benchmarks. The difference in IPC
is more significant for the high-IPC benchmarks. For
benchmarks with high IPC on SS1, SS2 IPC suffers noticeably because the doubled workload of redundant execution
saturates the already highly utilized 8-wide superscalar
datapath. In this scenario, the SS2 performance penalty
cannot be reduced without increasing the issue bandwidth
and functional units.
It is interesting to note that significant performance loss
is also experienced by SS2 for benchmarks with an SS1
IPC well below four—half the issue width. There are several reasons why this can happen. First, a low-IPC benchmark may nonetheless demand high utilization of the SS1
pipeline if a large number of mispredicted wrong-path
instructions are part of the overall execution. Similarly, a
low IPC benchmark may require the full capacity of the
ISQ and ROB to extract available instruction level parallelism (ILP). Several of the low- and moderate-IPC floatingpoint benchmarks also experience significant floatingpoint functional unit contention. A benchmark with a low
average IPC can include short program phases with high
IPC; SS2 bottlenecks during these instantaneously high
IPC regions can further lower the average IPC. In all of
these scenarios, it is possible to reduce the performance
penalty of re-execution through more efficient scheduling
and management of re-execution. In the next section, we
present an analysis to help clarify the performance behavior of SS2 and the effects of the different resource bottlenecks.
3. Factorial Design Analysis
The performance difference between SS2 and SS1 is not
caused by any single bottleneck. The contributing bottlenecks vary from benchmark to benchmark, and even
between different phases of the same benchmark. The
analysis in this section establishes the importance of individual bottlenecks in SS2, as well as their interactions.
3.1. SS2 Performance Factors
We reduce the factors contributing to performance bottlenecks in SS2 into three resource-related factors and one
mechanism-related factor:
•
•
•
•
X: issue width and functional unit bandwidth
C: ISQ and ROB capacity
B: decode and retirement bandwidth
S: staggering redundant threads (mechanism related)
X-factor: The X-factor represents the issue and functional
unit bandwidth, a limit on raw/peak instruction execution
throughput of a superscalar pipeline. We combine issue and
functional unit bandwidth into a single factor because they
must be scaled together in a balanced design. A fundamental property of the X-factor is that if an application on average consumes more than one-half of the issue and
functional unit bandwidth in SS1, it is impossible for the
same application to achieve the same level of performance
in SS2. However, what happens to an application that on
average consumes less than one half of the issue and functional unit bandwidth in SS1 is not immediately apparent,
since whether the available issue and functional unit bandwidth can be used effectively in SS2 depends on the other
factors.
C-factor: The C-factor represents the ISQ and ROB capacity. The C-factor governs a pipeline’s ability to exploit
instruction-level parallelism by executing instructions outof-order. Again, we combine the ISQ and ROB capacity
into a single factor because they are scaled together in
commercial designs.1 In SS2, the out-of-order window size
is effectively halved. Applications that depend on a large
out-of-order window to expose ILP lose performance on
1. A recent study has suggested, however, that there may be advantages
to scaling the ROB capacity disproportionally [1].
SS2, independent of the X-factor. On the other hand, applications that are insensitive to the out-of-order window size
perform predictably on SS2, as governed by the X-factor.
B-factor: The B-factor represents the various bandwidth
limits at the interface to the ISQ and ROB. These include
the decode bandwidth, the completion bandwidth and the
retirement bandwidth. In SS2, these bandwidth limits
impose a bottleneck because they must be shared between
the redundant M- and R-threads. We expect the B-factor to
have the least observed impact on SS2 performance,
because in a balanced design the X and C factors are generally tuned to become limiting factors before saturating the
other bandwidth limits.
S-factor: Besides the three resource-related factors, we
introduce a fourth factor, stagger (S-factor), that improves
the performance of SS2 but is not applicable to SS1. Several previous proposals for redundant execution on SMT
advocate maintaining a small stagger (128~256 instructions) between the progress of the leading M-thread and the
trailing R-thread [15,16]. In SMT-based designs, the stagger serves to hide cache-miss latencies from the R-thread
and to allow the M-thread to provide branch prediction
information to the trailing thread. Allowing some elasticity
between the progress of the two threads also allows better
resource scheduling. By giving static scheduling priority to
the M-thread, the resulting effect is that the R-thread
makes use of the slack resources left over by the M-thread
rather than competing with the M-thread for resources. The
reported benefit of allowing stagger is typically around a
10% increase in the IPC of redundant execution [15].
3.2. SS2 Design Space
The X, C, and B factors are potential bottlenecks that
cause SS2 to lose performance relative to SS1. The bottleneck associated with a factor is removed if the resources
associated with that factor are doubled from the assumed
configuration in Table 1. To understand the different contributing factors to SS2’s performance, we evaluate sixteen
SS2 configurations, based on enumerating all possible
combinations of settings for X, S, C and B. In each configuration, the factors X, C, and B are either kept the same as
Table 1 or doubled and an elastic stagger of up to 256
instructions is either enabled or disabled.
The resulting IPC improvements relative to SS2 for the
sixteen possible configurations are summarized in Table 2.
We order the factors in columns 1 through 4 by their overall impact on performance. In each configuration, we
report the percentage improvement relative to SS2 for the
integer and floating-point SPEC2K benchmarks and separately for the high and low-IPC integer and floating-point
benchmarks.
TABLE 2. Percentage increase in IPC relative to SS2 for all combinations of factors. The notes column identifies
mappings to designs referenced in this paper.
Factor
X
X
X
X
X
X
X
X
X
S
S
S
S
S
S
S
S
S
C
C
C
C
C
C
C
C
C
B
B
B
B
B
B
B
B
B
Integer
% Increase
All
High Low
0
0
0
3
4
2
3
1
4
5
4
6
9
13
6
10
15
7
12
14
11
13
16
11
15
25
9
15
26
9
19
28
14
20
30
14
16
27
9
17
29
10
20
30
14
22
33
15
Several general trends can be observed from Table 2.
First, a comparison of the upper and lower halves of the
table shows that the X-factor has a large performance
impact on all benchmark classes. Comparing the neighboring quarters of the table shows that stagger also improves
the performance of all benchmarks. Only the floating-point
benchmarks are highly sensitive to the C-factor. Finally,
from comparing neighboring rows, the B-factor has a minimal effect on all benchmarks.
Floating-point
% Increase
All
High Low
0
0
0
0
1
0
28
9
34
28
11
35
11
9
12
11
10
11
33
15
40
34
16
40
12
36
6
12
38
6
46
58
43
48
61
44
19
46
13
21
51
15
49
62
45
52
71
47
Notes
SS2
SS2+C+B ≈ O3RS [10]
SS2+S ≈ SRT [15]
SS2+S+C+B ≈ SHREC
SS2+X+C ≈ SS1 ≈ DIVA [2]
TABLE 3. The main factors and interactions that
increase performance in redundant execution.
Integer:
High
Integer:
Low
3.3. 2-k Factorial Analysis
Floating-point:
High
Factor
X
S
X+S
X
C
S
X
C
S
C
S
X
S+C
Effect
17.1
7.1
-5.2
5.2
4.3
3.1
33.5
9.9
6.4
27.0
6.2
4.6
-3.9
To examine the SS2 design space more systematically,
we apply 2-k factorial analysis to the CPI1 of the sixteen
configurations to disentangle the performance impact of
each factor and the impact from interactions between multiple factors. (Refer to [3] for a detailed explanation of 2-k
factorial analysis.) The result of the 2-k factorial analysis is
a quantitative measure of the average effect of changing
each of the four factors individually. In addition, factorial
analysis also gives the effect due to interactions between
changing any two factors, three factors, or all four factors
together. Table 3 summarizes the significant effects (> 3%)
for high and low-IPC integer and floating-point bench-
marks. For rows showing an individual factor, the value
under the “Effect” column signifies the average percentage
CPI decrease (i.e., performance increase) between all configurations with the factor enabled versus all configurations with the factor disabled.
1. This is because CPI is additive when normalized with respect to the
instruction count, while IPC is not.
For example, the significant factors to increase performance on high-IPC floating-point benchmarks are X, C
and S. The interactions between the three factors (not
shown) are insignificant. Their effects sum nearly linearly
Floating-point:
Low
6
6
Low High
5
5
4
4
Low High
SS2
SS2+C
IPC
3
3
1
1
0
0
Av
er
A
Av age ve
er (L rag
ag o
e
e wo
(H n
ig ly)
h
on
ly)
eq
ua
k
fm e
a3
d
lu
c
fa as
ce
re
c
sw
im
m
gr
id
ap
p
ar lu
t-1
1
am 0
w mp
up
w
is
ga e
lg
si el
xt
ra
ck
m
es
a
ap
si
2
Av
er
Av
a
er
Av ge
a
er (Lo ge
ag
w
e
on
(H
l
ig y)
h
on
ly)
2
g
vp ap
r-r
ou
te
pa
rs
er
bz
tw
ip
ol
2f
s
pe ourc
rlb
e
m
kgz
di
ip
-g ff
ra
ph
gc ic
c16
6
eo
n- craf
ru
ty
sh
m
vo eie
rte r
xon
e
IPC
SS1
(a) Integer
(b) Floating-point
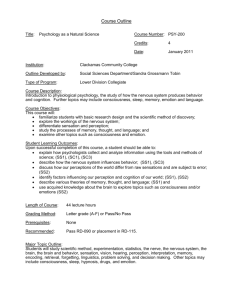
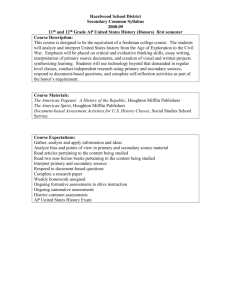
FIGURE 3. The effect of relieving ISQ and ROB contention in SS2 (C-factor).
when more than one factor is enabled. In another example,
the two most significant factors for high-IPC integer
benchmarks are X and S. In this case, X and S have a significant and negative interaction. In other words, the effect
of implementing both X and S is that the added performance improvement will be less than the simple sum of the
two effects.
Although the X-factor has significant effects for all
classes of benchmarks, we do not explore the X-factor further, since we cannot increase the issue bandwidth or functional units. We will show, however, that the S-factor
improves performance by helping alleviate the issue bandwidth and functional unit pressure. One should note that
from Table 2, doubling the issue bandwidth and functional
units alone (SS2+X) cannot improve SS2’s performance to
SS1 levels. We also do not discuss the B-factor since it is
not a significant factor in any benchmark class. We concentrate on the C and S factors next.
words, given the resources in Table 1, O3RS would perform similarly to SS2 with twice the ISQ and ROB capacity. Figure 3 compares the IPC of SPEC2K benchmarks on
SS1, SS2 and SS2 with twice the ISQ and ROB capacity
(SS2+C). As suggested by the factorial analysis, the IPCs
of SS2 and SS2+C are comparable on integer benchmarks,
and SS2+C shows a 28% improvement over SS2 for floating-point benchmarks.2 The previous 32% floating-point
performance gap between SS2 and SS1 has been reduced
to 25% by the C-factor.
A limitation of the O3RS approach is that it cannot be
easily modified to support stagger. In O3RS, redundant
instructions should issue from the ISQ in rapid succession
to not increase the effective occupancy of the ISQ. Increasing this interval to support stagger has the effect of reducing the out-of-order window, offsetting O3RS’s original
benefit from the C-factor.
3.5. Staggered Re-execution
3.4. Capacity of ISQ and ROB
The 2-k factorial analysis suggests that the capacity of
the ISQ and ROB (C-factor) in SS2 can have a major
impact on the performance of low-IPC floating-point
benchmarks. Although one cannot physically double the
capacity of the ISQ and ROB due to complexity and area
constraints, microarchitectural techniques exist to achieve
the same effect in the context of redundant execution.
Mendelson and Suri proposed the O3RS approach for
redundant execution in a superscalar microarchitecture
[10]. A unique feature of O3RS is that an instruction occupies just one entry of the ISQ and ROB after decode.1 An
instruction is issued twice from the same ISQ entry before
it is removed; similarly, one ROB entry keeps track of the
two redundant executions of the same instruction. In other
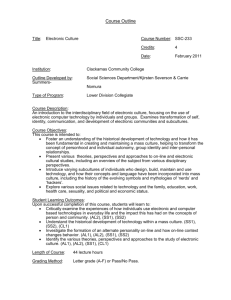
Figure 4 compares the IPC of SPEC2K benchmarks on
SS1, SS2, and SS2 with stagger (SS2+S). In accordance
with previous stagger studies, SS2+S results in a noticeable
IPC improvement over SS2, 9% on integer and 11% on
floating-point benchmarks. However, notice in Table 2 that
also relieving the C-factor (i.e., SS2+S+C) can yield
another 3% improvement on integer benchmarks and 22%
on floating-point benchmarks beyond SS2+S.
1. The original O3RS is based on an RUU. Here, we describe the spirit of
the proposal in the context of an ISQ and ROB.
2. It is important to note that the effect given by the factorial analysis is
an average over all settings of other factors; the actual change in performance from changing one variable may be higher or lower, depending on
the state of the other factors.
6
6
Low High
5
5
4
4
Low High
SS2
SS2+S
IPC
3
3
1
1
0
0
Av
er
A
Av age ve
er (L rag
ag o
e
e wo
(H n
ig ly)
h
on
ly)
eq
ua
k
fm e
a3
d
lu
ca
fa s
ce
re
c
sw
im
m
gr
id
ap
pl
ar u
t-1
1
am 0
w mp
up
w
is
ga e
lg
si el
xt
ra
ck
m
es
a
ap
si
2
Av
er
Av
a
er
Av ge
ag
(
L
e
er
ag ow
e
o
(H nly
)
ig
h
on
ly)
2
g
vp ap
r-r
ou
te
pa
rs
er
bz
tw
ip
ol
2f
s
pe ourc
rlb
e
m
kgz
d
ip
-g iff
ra
ph
gc ic
c16
6
eo
c
r
naf
ru
t
sh y
m
vo eie
rte r
xon
e
IPC
SS1
(a) Integer
(b) Floating-point
FIGURE 4. The effect of allowing a stagger of 256 instructions in SS2 (S-factor).
4
0 Stagger
256 Stagger
1K Stagger
1M Stagger
IPC
3
2
1
be latency-bound. With an IPC of 1.5, an application would
need a stagger of up to 300 instructions to completely overlap a 200-cycle main memory access. Enabling 1K or 1M
stagger—longer than the longest system latency—has little
additional benefit. Very large stagger could be effective if a
program exhibited IPC variations across large program
phases, but the associated hardware cost is indefensible for
the incremental performance benefit.
4. SHREC
0
Integer Low
Integer High
Floating-point
Low
Floating-point
High
FIGURE 5. Applications are not sensitive to degrees
of stagger over 256 instructions.
We conclude this section with an analysis of the impact
of varying the degree of elastic stagger. The allowed
degree of stagger impacts performance because it limits the
granularity of IPC variation that can be effectively hidden.
For example, if the maximum degree of stagger is longer
than an L2 miss latency, it is likely that the R-thread can
continue to make forward progress on backlogged instructions while the M-thread is stalled on a L2 miss. However,
if the maximum degree of stagger is much shorter than an
L2 miss latency, the R-thread will also stall due to data
dependencies on the same L2 miss.
We evaluate SS2+S+C over different maximum staggers of 0, 256, 1K, and 1M instructions. The trends of IPC
versus degree of stagger are reported in Figure 5 for the
high/low-IPC integer and floating-point benchmarks.
Figure 5 shows that, with the exception of high-IPC floating-point benchmarks, a moderate stagger of up to 256
instructions is sufficient to capture nearly all the benefits.
Low-IPC applications, in particular, have the potential to
In this section, we present the details of SHREC and
evaluate its performance. The SHREC design reduces the
performance penalty of redundant execution through more
efficient scheduling and management. First, a key feature
of the SHREC design is that R-thread instructions are processed differently from M-thread instructions. The Rthread instructions are only checked using input operands
produced by the M-thread. This asymmetric handling of reexecution restores the full capacity at the ISQ and ROB to
the M-thread. R-thread instruction checking is efficiently
handled by a separate, simple in-order scheduler. Thus,
bottlenecks associated with the ISQ and ROB are avoided
without physically enlarging those structures. Second, the
progress of the threads can stagger elastically, up to the
size of the ROB. This added scheduling flexibility allows
the R-thread to fill in the slack issue bandwidth and functional units left idle by the M-thread, rather than constantly
competing with the M-thread. Delaying R-thread execution
from the corresponding M-thread instruction also hides
both cache miss latency and branch misprediction latency
from the corresponding R-thread instruction. Thus, the
issue bandwidth and functional unit bottlenecks can be
ameliorated by means of more efficient utilization, rather
than providing additional issue bandwidth or functional
units.
4.2. Asymmetric Re-execution on Shared FUs
Retirement
ROB
Fus
FUs
Rename/
Decode
Fetch
ISQ
In−order Issue
Phys RegFile
Arch RF
DIVA Checker
Exception
(a)
Exception
Phys RegFile
Compare
Retirement
FUs
Rename/
Decode
Fetch
In−order
SHREC
Checker
ISQ
ROB
(b)
FIGURE 6. (a) DIVA and (b) SHREC microarchitectures.
4.1. Asymmetric Re-execution on Dedicated FUs
To aid our discussion of SHREC, we first review DIVA,
a prior proposal for asymmetric re-execution [2]. The previously proposed DIVA microarchitecture augments a conventional superscalar pipeline (e.g., SS1) with a highly
abbreviated checker pipeline [2, 5, 21]. Figure 6(a) depicts
the datapath of the DIVA microarchitecture. In DIVA,
before the completed instructions in the main out-of-order
pipeline can retire, the instructions must first proceed in
program-order through the checker pipeline, accompanied
by their previously computed results. The checker pipeline
re-computes each instruction individually; a mismatch
between the original result and the re-computed result triggers an exception in the main out-of-order pipeline.
To minimize the throughput mismatch, the DIVA
checker pipeline is assumed to have the same issue bandwidth and functional unit mix as the main out-of-order
pipeline. Since the instructions in the checker pipeline are
not constrained by data dependencies, the checker issue
logic is in-order and the functional units can be deeply
pipelined. In other words, the checker pipeline, although
greatly simplified, can match the throughput of the main
out-of-order pipeline.
DIVA’s performance should closely follow SS1, since
DIVA’s main out-of-order pipeline supports only the initial
execution of an instruction stream on essentially the same
hardware as SS1. However, DIVA’s good performance is,
to a large degree, also bolstered by a second set of functional units at a significant cost over SS1, as discussed in
Section 2.1.
As illustrated in Figure 6(b), a SHREC pipeline is comprised of a primary out-of-order pipeline (essentially SS1)
and an in-order checker pipeline (shaded in gray). The outof-order pipeline and the checker pipeline in SHREC share
access to a common pool of functional units. In other
words, SHREC adopts DIVA’s asymmetric execution
scheme to relieve capacity and bandwidth contention at the
ISQ and ROB, but shares functional units to reduce the
hardware cost. This design point is important because softerror tolerance may not be needed under all circumstances
(e.g., Doom vs. TurboTax). In DIVA, soft-error tolerance
comes at a fixed hardware overhead. SHREC’s soft-error
tolerance comes with a performance overhead but can be
disabled to regain performance in non-critical applications.
The SHREC pipeline is similar to the DIVA pipeline
except in the design surrounding the functional units and
issue bandwidth of the checker pipeline. Based on the
assumed SS1 configuration in Table 1, the derived SHREC
microarchitecture can issue only up to eight instructions
per cycle to the original set of functional units, whether
from the out-of-order or the checker pipelines. The out-oforder pipeline has static priority for the instruction issue
bandwidth and functional unit selection; only unused issue
bandwidth and functional units are available to the in-order
issue window of the checker pipeline.
Naturally, the out-of-order issue logic in SHREC is
more complicated than in SS1. However, by 1) keeping the
number of issue slots the same, 2) assigning fixed priority
to the out-of-order pipeline, and 3) issuing from only a
small in-order window of instructions from the checker
pipeline, the increase in complexity can be kept to a minimum. SS1 originally supports a 128-entry ISQ. The equivalent SHREC checker pipeline is allowed an eight-entry inorder issue window, and the SHREC ISQ is reduced commensurately to 120 entries. Thus, the total number of
entries feeding into the issue selection logic remains 128,
as in SS1. No additional ports are added to the out-of-order
issue queue, since the in-order issue window is a logically
and physically separate structure.
4.3. Microarchitecture Operation
SHREC’s operation is similar to DIVA and can leverage
many of the same optimizations proposed for DIVA [5,
21]. Below, we describe the basic operations of the SHREC
pipeline.
Out-of-order Pipeline: The main SHREC pipeline is a
conventional superscalar out-of-order design. An instruction stream proceeds through the out-of-order pipeline normally, except completed instructions must be re-executed
6
Low High
5
4
4
IPC
5
3
1
0
0
Av
er
A
Av age ve
er (L rag
ag o
e
e wo
(H n
ig ly)
h
on
ly)
eq
ua
k
fm e
a3
d
lu
c
fa as
ce
re
c
sw
im
m
gr
id
ap
p
ar lu
t-1
1
am 0
wu mp
pw
is
ga e
lg
six el
tra
ck
m
es
a
ap
si
1
Av
er
Av
a
er
Av ge
ag
(
L
e
er
ag ow
e
o
(H nly
)
ig
h
on
ly)
2
(a) Integer
SS2
SHREC
SS2+S+C+B
SS1
Low High
3
2
g
vp ap
r-r
ou
te
pa
rs
er
bz
tw
ip
ol
2f
s
pe ourc
rlb
e
m
kgz
d
ip
-g iff
ra
ph
gc ic
c16
6
eo
c
r
naf
ru
t
sh y
m
vo eie
rte r
xon
e
IPC
6
(b) Floating-point
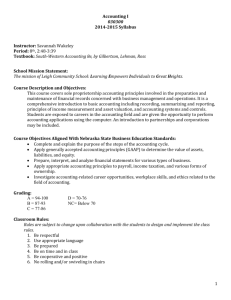
FIGURE 7. The IPCs of SS2, SHREC, and SS1. SS2+S+C+B models an idealized SHREC model.
by the checker pipeline before they can retire from the
ROB. The main pipeline needs to be augmented by a result
buffer that records the result of each instruction. These values are later re-executed by the checker. This result buffer
operates in tandem with the ROB, but has its own read and
write ports, thus it does not increase ROB complexity or
port requirements.
Checker Pipeline: As in DIVA, we assume information
about an instruction’s initial execution in the out-of-order
pipeline is conveyed to the checker pipeline without error
via the result buffer (protected by ECC and circuit-level
techniques). The checker pipeline considers at most eight
consecutive completed instructions in the ROB for re-execution in program order, subject to the availability of surplus issue slots and functional units not scheduled by the
main pipeline. When issued, the checker fetches operands
from the same physical registers that provided operands to
the initial execution. Since the total number of instructions
issued per cycle is never more than in SS1, additional register file ports are not needed.
The SHREC result generally agrees with the performance
of the idealized SS2+S+C+B model (included in Figure 7
for comparison). The small difference between SHREC
and SS2+S+C+B is caused by SHREC’s in-order issue
restriction on the R-thread; SS2+S+C+B still supports outof-order issue for the R-thread.
SHREC is especially effective in reducing the performance penalty for benchmarks with low to moderate IPC
on SS1. SHREC matches the SS1 IPC for low-IPC integer
benchmarks and comes to within 8% for low-IPC floatingpoint benchmarks. In this scenario, SHREC’s main out-oforder pipeline operates identically to SS1 because there is
ample issue bandwidth and functional units to support
equal progress by both the main pipeline and the checker
pipeline. The same cannot be claimed for SS2 because,
even with ample issue bandwidth and functional units, the
contention for other resources still reduces IPC.
4.4. SHREC Performance
On high-IPC benchmarks, SHREC loses performance
relative to SS1 because SHREC can only sustain half of the
peak performance of SS1 (when the issue bandwidth and/
or functional units are saturated). In these scenarios, exemplified by the high-IPC floating-point benchmarks,
SHREC and SS2 perform comparably since both suffer
from the same bottlenecks in issue bandwidth and functional units. In apsi, sixtrack, and art, SHREC is even
slightly slower than SS2. This slowdown is attributed to
the SHREC checker pipeline’s in-order issue, which introduces more stalls than SS2 when there is contention for the
floating-point units.
Figure 7 compares the IPC of SPEC2K benchmarks on
SS2, SHREC, SS2+S+C+B, and SS1 models. Overall,
SHREC reduces the performance penalty relative to SS1 to
4% on integer and 15% on floating-point benchmarks. This
penalty is in comparison to SS2’s performance penalty of
15% on integer and 32% on floating-point benchmarks.
In many benchmarks, performance improvement opportunities also exist when the program exerts fluctuating
pressure on issue slots and functional units. IPC fluctuation
can be caused by stall events such as cache misses, pipeline
refills after branch mispredictions, long latency operations,
or inherent IPC variations. During high-IPC cycles, the
Verification and Retirement: Following re-execution,
instructions are considered for program-order retirement.
The checker-computed result is immediately compared
against the original result computed by the out-of-order
pipeline. If the values agree, the instruction retires from the
ROB. Otherwise, a soft-exception restarts execution at the
corrupted instruction.
5
4
4
3
3
IPC
IPC
5
2
2
1
1
0
SHREC - High
SS2 - High
SHREC - Low
SS2 - Low
0
0.5X
X
1.5X
2X
(a) Integer
0.5X
X
1.5X
2X
(b) Floating-point
FIGURE 8. Over a range of functional unit mix sizes, SHREC uses the supplied units more efficiently than SS2.
SHREC out-of-order pipeline momentarily keeps pace
with SS1, while the checker pipeline is starved from issue.
If the out-of-order pipeline has sustained high-IPC (i.e., in
high-IPC benchmarks) the out-of-order pipeline will eventually stall because the ROB backs up with instructions
awaiting checking. Ideally, high-IPC program phases are
interspersed with sufficiently frequent low-IPC phases
such that the checker pipeline catches up. In these fluctuating IPC scenarios, SHREC will be more efficient than SS2.
Although SHREC does not increase issue bandwidth or
the functional unit count, it reduces the pressure of sharing
issue bandwidth and functional units through more efficient utilization. Here, we present additional data to show
that SHREC’s utilization efficiency is scalable when additional issue bandwidth and functional units are allowed.
Figure 8 plots IPC versus the X-factor (available issue
bandwidth and functional units) for high/low integer and
floating-point benchmarks. ‘2X’ means twice the issue
bandwidth and functional units as specified in Table 1.
Between 0.5X and 2X, SHREC matches or outperforms
SS2, except under high contention for floating-point units.
The integer benchmarks operate in a mode where they
become ILP-bound with additional functional units. At that
point, the benefit of SHREC’s efficient scheduling diminishes; the IPC of SS2 and SHREC converge for both high
and low-IPC integer benchmarks. The floating-point
benchmarks tend to have high ILP, but experience functional unit bottlenecks. As the number of functional units
increases, this bottleneck diminishes and the effect of more
efficient SHREC scheduling increases. The performance of
SHREC and SS2 should eventually converge, however, as
even more functional units are introduced.
5. Conclusion
Recent proposals for soft-error tolerance in superscalar
microarchitectures suffer a significant performance loss by
requiring the instruction stream to be executed redundantly. In a balanced superscalar design, supporting a second redundant thread incurs a severe performance loss due
to contention for bandwidth and capacity in the datapath,
(e.g., issue bandwidth and the number of functional units,
issue queue, reorder buffer size, and decode/retirement
bandwidth). Relaxing any single resource bottleneck cannot fully restore the lost performance.
The proposed SHREC microarchitecture effectively
relieves all of the above bottlenecks, except issue bandwidth and the number of functional units. In SHREC, the
main thread executes normally, as on a conventional superscalar datapath. The redundant thread's instructions, however, are only checked using input operands already
computed by the main thread. The redundant thread does
not compete with the main thread for out-of-order scheduling resources because checking can be efficiently managed
by a separate, simple in-order scheduler. Furthermore, the
progress of the main and redundant threads can stagger
elastically up to the size of the reorder buffer. This added
scheduling flexibility allows better utilization of issue
bandwidth and functional units, reducing the performance
pressure from sharing. The above techniques enable
SHREC-style re-execution to share resources more efficiently and to achieve higher IPC over previous sharedresource concurrent re-execution proposals.
Acknowledgements
We would like to thank the anonymous reviewers and
members of the Impetus research group at Carnegie Mellon
for their helpful feedback on earlier drafts of this paper.
This work was supported by NSF CAREER award CFF037568, NSF award ACI-0325802, and by Intel Corporation. Computers used in this research were provided by an
equipment grant from Intel Corporation.
References
[1] Haitham Akkary, Ravi Rajwar, and Srikanth T. Srinivasan.
Checkpoint processing and recovery: Towards scalable large instruction window processors. In Proceedings of the 36th Annual
International Symposium on Microarchitecture, December 2003.
[2] T. M. Austin. DIVA: A reliable substrate for deep submicron
microarchitecture design. In Proceedings of the 32nd International Symposium on Microarchitecture, November 1999.
[3] G. E. P. Box, W. G. Hunter, and J. S. Hunter. Statistics for Experimenters. John Wiley and Sons, Inc., 1978.
[4] Doug Burger and Todd M. Austin. The SimpleScalar tool set,
version 2.0. Technical Report 1342, Computer Sciences Department, University of Wisconsin–Madison, June 1997.
[5] Saugata Chatterjee, Chris Weaver, and Todd Austin. Efficient
checker processor design. In Proceedings of the 33rd International Symposium on Microarchitecture, pages 87–97, December
2000.
[6] Neil Cohen, T.S. Sriram, Norm Leland, David Moyer, Steve
Butler, and Robert Flatley. Soft error considerations for deep-submicron CMOS circuit applications. In IEEE International Electron Devices Meeting: Technical Digest, pages 315–318,
December 1999.
[7] Joel S. Emer. EV8: the post-ultimate alpha. In International
Conference on Parallel Architectures and Compilation Techniques, September 2001. Keynote address.
[8] T. Juhnke and H. Klar. Calculation of the soft error rate of submicron CMOS logic circuits. IEEE Journal of Solid State Circuits,
30(7):830–834, July 1995.
[9] Shih-Chang Lai, Shih-Lien Lu, Konrad Lai, and Jih-Kwon
Peir. Ditto processor. In Proceedings of the International Conference on Dependable Systems and Networks, June 2002.
[10] Avi Mendelson and Neeraj Suri. Designing high-performance
and reliable superscalar architectures: The Out of Order Reliable
Superscalar O3RS approach. In Proceedings of the International
Conference on Dependable Systems and Networks, June 2000.
[11] Shubhendu S. Mukherjee, Christopher Weaver, Joel Emer,
Steven K. Reinhardt, and Todd Austin. A systematic methodology
to compute the architectural vulnerability factors for a high-performance microprocessor. In Proceedings of the 36th Annual International Symposium on Microarchitecture, December 2003.
[12] Ronald P. Preston, et al. Design of an 8-wide superscalar
RISC microprocessor with simultaneous multithreading. In IEEE
International Solid-State Circuits Conference, Digest of Technical
Papers, February 2002.
[13] Zach Purser, Karthik Sundaramoorthy, and Eric Rotenberg.
Slipstream processors: Improving both performance and fault tolerance. In Proceedings of the 33rd International Symposium on
Microarchitecture, December 2000.
[14] Joydeep Ray, James C. Hoe, and Babak Falsafi. Dual use of
superscalar datapath for transient-fault detection and recovery. In
Proceedings of the 34th International Symposium on Microarchitecture, December 2001.
[15] Steven K. Reinhardt and Shubhendu S. Mukherjee. Transient
fault detection via simultaneous multithreading. In Proceedings of
the 27th International Symposium on Computer Architecture, June
2000.
[16] Eric Rotenberg. AR-SMT: A microarchitectural approach to
fault tolerance in microprocessors. In Proceedings of the 29th International Symposium on Fault-Tolerant Computing, June 1999.
[17] Timothy Sherwood, Erez Perelman, Greg Hamerly, and Brad
Calder. Automatically characterizing large scale program behavior. In Proceedings of the 10th International Conference on Architectural Support for Programming Languages and Operating
Systems, October 2002.
[18] Premkishore Shivakumar, Michael Kistler, Stephen W.
Keckler, Doug Burger, and Lorenzo Alvisi. Modeling the effect of
technology trends on the soft error rate of combinational logic. In
Proceedings of the International Conference on Dependable Systems and Networks, pages 389–398, June 2002.
[19] Dean M. Tullsen, Susan J. Eggers, and Henry M. Levy. Simultaneous multithreading: Maximizing on-chip parallelism. In
Proceedings of the 22nd International Symposium on Computer
Architecture, June 1995.
[20] T. N. Vijaykumar, Irith Pomeranz, and Karl Cheng. Transient-fault recovery using simultaneous multithreading. In Proceedings of the 29th International Symposium on Computer
Architecture, May 2002.
[21] Chris Weaver and Todd Austin. A fault tolerant approach to
microprocessor design. In IEEE International Conference on Dependable Systems and Networks, July 2001.