Evaluation of an Adaptive Transport Protocol Abstract
advertisement

Evaluation of an Adaptive Transport Protocol
Benjamin Atkin and Kenneth P. Birman
Department of Computer Science
Cornell University, Ithaca, NY
batkin,ken @cs.cornell.edu
Abstract
another type of data. Unfortunately, most existing interfaces
to network protocols, such as the BSD sockets interface, do
not provide much detail about network conditions to the user.
Making up for this omission and supplying a greater degree
of control over network communications to applications is a
nontrivial undertaking: even the task of determining the bandwidth available to the application can be complicated if there
are multiple applications concurrently using the network.
We have concentrated on bursty applications that send messages over the network intermittently or unpredictably, since
stream-oriented protocols such as TCP have been highly optimised for wireless networks. Bursty communication makes
tasks such as dividing bandwidth between different classes of
data more difficult, since the bandwidth allocation between
classes cannot be both constant and fair. Dealing with messages rather than streams also permits a more flexible interface, in which a message can be re-prioritised or have its transmission suspended, restarted, or cancelled. Web browsers, file
systems and FTP, and X Windows are potential examples of
applications which could benefit from our extended network
API.
The structure of the rest of this paper is as follows. Section 2 describes the motivation for our API and identifies some
applications which could benefit from it. Section 3 describes
NAI, the Network-Aware Interface we have designed for bursty
communication. Section 4 describes the ATP implementation
of NAI and its algorithms, as well as discussing some examples of execution. Section 5 compares the performance of ATP
to TCP and implementations of NAI over TCP, in a series of
experiments. Section 6 summarises related work, while Section 7 concludes and describes our plans for future work.
Applications on mobile computers must adapt to high variability in wireless network performance. Extending the semantics
of transport protocols to offer more control over communication to the user allows applications to adapt their behavior to
bandwidth variability. We examine adding bandwidth notifications, priorities and timeliness guarantees to a network API as
a method for achieving greater application control over bursty
traffic. Experiments demonstrate that the extended API allows
applications to adjust to bandwidth variations effectively. We
also compare three different implementations of the API: two
which run on top of TCP, and one new protocol, ATP, which
performs comparably to the TCP extensions, but has better
performance for some workloads, including a workload simulating remote file system traffic.
1 Introduction
Wireless networks are characterised by high variability in network conditions: bandwidth and round-trip times can vary
greatly depending on the distance of a host from a base station, and on local interference. The problem of adapting applications and network protocols which make use of streamoriented communication, such as video playback, to variable
wireless network conditions has been well studied. In this paper, we describe our work in providing support for applications
which exhibit bursty communication patterns.
Many of the applications which one might wish to use on
a wireless host send or receive data of multiple types, which
are not of the same precedence, or sent in the same volume.
For instance, FTP sends separate control and data messages,
and a distributed file system client might send cache validations, receive new versions of files and write back modified
files. In order to react to changing bandwidth available to the
host, an application designed to operate in a wireless network
might adjust its communication patterns, reducing the transmission of data of one type while increasing the priority of
2 Motivation
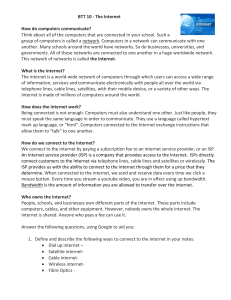
To illustrate the scope of variability in wireless communication, we have measured network conditions in our own 802.11b
wireless network. Figure 1 shows some representative measurements. The graph of bandwidth in Figure 1(a) is derived
from packet-pair measurements [1] made by a receiving host
as the sender moved in the vicinity of a base station. Each
The authors were supported in part by DARPA/AFRL-IFGA grant F30602-991-0532, with additional support from Microsoft Research and from the Intel
Corporation.
1
0.2
round−trip time (s)
bandwidth (KB/s)
800
600
400
200
0
0
100
200
300
time (s)
400
0.15
0.1
0.05
0
0
500
100
200
300
time (s)
400
500
Figure 1: Time series of bandwidth and round-trip times over a 10 minute interval in a wireless LAN. The graphs show values obtained by a
combination packet-pair and round-trip time estimate for 1500-byte packets measured on our wireless network. A laptop communicated over
a wireless link with a desktop machine attached to a base station. Variations are due to distance from the base station and local interference
around the laptop as it moved. The regions from 0-100 and 500 seconds onwards correspond to the laptop being next to the base station.
second, two packets were sent consecutively from the wireless
host to the receiver, which was connected to the base station,
to measure the inter-arrival time. Under ideal conditions, the
inter-arrival time measurement corresponds to the time to send
a single packet over the wireless network. The inverse of this
number provides a rough indication of the bandwidth available at that instant. We note that since the 802.11b protocol
incorporates its own packet retransmissions, high error rates
are translated into reduced bandwidth and increased latency.
Both the bandwidth and round-trip time measurements in
Figure 1 are highly variable. Applications which perform a
large amount of network communication under these types of
circumstances may have poor performance, unless they can
adapt to such a degree of variability. Underestimating the
available bandwidth may underutilise the network, and overestimating bandwidth may leave an application unable to function. Adaptive applications are able to change their degree
of communication or mode of operation to suit the currently
available bandwidth. Examples of classic adaptive applications include streaming video playback and image retrieval
during web browsing [2, 3]. In response to low bandwidth, a
video player might reduce the quality of the frames it displays,
or a web browser might retrieve degraded versions of images
appearing in web pages, instead of the original high-quality
versions. We call this modal adaptation, since the application
has a set of modes it can operate in, each with an associated
communication cost, and chooses its current mode based on
the available bandwidth.
Considered as a whole, web browsing is an example of
a different class of applications, which we call mixed-mode
applications. In contrast to video playback, these are typified
by irregular communication of distinct units of data, which
can be divided into several classes of importance. Common
characteristics of mixed-mode applications might include:
timeliness requirements and distributions of sizes
(iii) Possibility for fine-grained adjustment of behavior based
on bandwidth availability
We have already listed some examples of potential mixedmode applications. Two are particularly worth elaborating on:
Web browsing: A web browser retrieves text, images and other
data types. Rather than uniformly degrading image quality, it
can prioritise text over images, and then leave the remaining
bandwidth to be used for image retrieval. Encodings such as
progressive JPEG for images can allow optimistic retrieval of
an image at high resolution, and an early abort of the request
(or a partial result) if bandwidth turns out to be insufficient.
Web browsing is an interactive activity, so the tradeoff of image retrieval delay versus available bandwidth can also be used
to decide at which quality to retrieve an image.
Distributed file system: Distributed file systems are popular
because of the convenience, security, fault-tolerance and datasharing capabilities which they provide, in contrast to the file
system local to a machine [4]. Unlike web browsing, the work
done by a distributed file system client may be on behalf of
several independent applications on a host (for instance, a word
processor and compiler executing concurrently). A caching
file system client also performs multiple types of communication with a file server: it has to fetch files in response to
requests and write files back to the file server, and it may also
validate files in the local cache in order to reuse them, and
prefetch files. If a file is not shared with other users, then writing it back to the file server can be delayed until bandwidth
is plentiful; prefetching files is only advantageous if it does
not degrade the overall performance of the file system client.
Once again, timeliness of communication is important, in order to prevent the user suffering long delays in file accesses.
(i) Bursty communication of discrete, application-specified Cache validations should be performed quickly, but prefetches
can take longer.
data items
(ii) Different classes of data transfers, each with a different importance (priority), and potentially with different
2
3 A network-aware API
sees fit. NAI schedules messages from each message queue
independently, dividing the available bandwidth between the
queues according to the highest priority used by the queue. In
this way, even an application which exclusively uses the lowest
priority level will get some share of the bandwidth, though not
as much as applications which use all the priority levels. We
do not describe message queues in detail in this paper, since
techniques for bandwidth division among concurrent streams
are already well studied [6].
TCP is a well-tuned protocol and the standard reliable communication protocol for the Internet, so the benefit of implementing a completely new, incompatible protocol is small. Since
most of the mismatch between TCP and the mixed-mode class
of applications we have identified stems from the narrow interface to TCP, the approach we have explored is to implement a
protocol that runs on top of TCP or some other reliable transport protocol, but has enhanced semantics.
We use the name NAI (Network-Aware Interface) to refer
to the API itself. In Section 5 we compare three implementations of the interface: ATP, NAI-TCP, and NAI-MTCP, of
which ATP (the Adaptive Transport Protocol) is the most sophisticated. Our discussion of NAI is made with reference to
its implementation in ATP, which includes all the features of
NAI.
3.3 Bandwidth estimation and timers
In order to adjust its behavior based on network conditions, an
application must first know how much bandwidth is available.
The true bandwidth cannot always be determined accurately,
so a bandwidth estimate must be derived. ATP incorporates a
bandwidth estimator, but the two simpler implementations of
NAI do not. The remainder of this section describes NAI over
ATP.
3.1 Sending and receiving messages
The most straightforward way for an application to moniThe basic operations of NAI conform to the BSD sockets in- tor how much bandwidth is available is to register a bandwidth
terface. NAI provides the regular socket, bind, and con- callback and an associated bandwidth range (this is an idea
nect calls, but augments the sendmsg and recvmsg calls borrowed from Odyssey [3]). A bandwidth callback is a funcwith additional information. Unlike TCP, NAI is message- tion specified by the application, and called by NAI when the
oriented: an application specifies its data units (files, images, bandwidth moves outside the specified range. The bandwidth
RPCs, and so on) to NAI explicitly, and NAI preserves mes- callback function may itself register a new callback, with a
sage boundaries at the receiver. NAI incorporates some ideas new range around the new bandwidth value.
from Application Level Framing (ALF) [5] in the way that it
A disadvantage of this mechanism is that if multiple applihandles messages. When an application makes a send call, cations are using the network, then they will all see the same
it tells NAI how to process the message: what its priority is bandwidth estimate, unless bandwidth is somehow shared berelative to other messages, and how to react if there is insuffi- tween them (we discuss sharing bandwidth between applicacient bandwidth to deliver the message. Priorities are strict, so tions later in this section). If the applications communicate in
that low-priority messages wait for the high-priority messages bursts, rather than over streams, then it is nontrivial to deterahead of them. Messages can be sent synchronously or asyn- mine what share of the bandwidth each should be entitled to,
chronously, allowing a sender to inspect the state of a message and therefore, what estimate it should be given.
as it is being sent, to see how much data remains to be transAn alternative solution, which is also provided by NAI, is
ferred. Based on this information, it might decide to abort the to allow applications to specify their bandwidth requirements
transfer, defer it to make way for more important messages, or implicitly, by using callback timers for individual messages. A
restart it if it was already deferred.
callback timer specifies a timeout and a function to call if the
timeout expires; it can also expire early, if the bandwidth estimate indicates that the message cannot be delivered in time,
3.2 Message queues
according to the current bandwidth. Using a callback timer,
A strict priority scheme for transmitting messages introduces an application can specify how long it expects a message to
the possibility of starvation of low-priority messages. This take to transmit – implying a corresponding available bandis particularly the case for multiple non-cooperating applica- width – and relies on NAI to invoke the callback if the timeout
tions, since one application could undermine the priority scheme occurs. If the callback is invoked, NAI first suspends transby putting all of its messages at the highest priority. Trans- mitting the message, and the application then decides whether
mitting all messages of one priority serially would also make to continue or defer transmission, or to cancel the message.
the transmission delay for a message highly unpredictable, so Callback timers provide a finer degree of control than coarse
that an application might have trouble setting callback timers modes based on the available bandwidth, since the applicaappropriately. To overcome these problems, NAI incorporates tion can speculatively send messages without knowing ahead
message queues. Each application initially has a separate mes- of time that the bandwidth to deliver them is available. Using
sage queue, and it can create additional message queues as it a callback timer also allows an application to ensure timely
3
delivery for a message.
Implementing callback timers requires controlling the admission of messages. The ATP implementation does this by
ranking messages by priority and then deciding if a new message can be added to the currently queued messages without
jeopardising the timers of any existing messages (that is, without causing a message which was deliverable under the current bandwidth to exceed its timeout value). Within a priority
level, ATP uses the Earliest-Deadline First scheduling algorithm [7], familiar from real-time scheduling, for delivering
messages within their timeout intervals.
Of course, not all messages are sent with callback timers,
in which case they are implicitly assigned an infinite timeout.
An application which does not make use of callback timers at
all could accumulate a large backlog of messages, if it sends
messages at a faster rate than they can be transferred over the
network. We are investigating implementing a backlog-based
callback scheme to support these types of applications, which
invokes callbacks based on the incoming and outgoing rates of
messages.
lies in deciding whether to use multiple streams to connect the
sender to the receiver, and, if so, how to allocate messages to
streams. Using a single TCP stream will result in all message
transmissions being serialised, so that a high-priority message
may have to wait for a low-priority message. Using multiple TCP streams may result in unpredictable competition for
bandwidth, since TCP is a greedy protocol and most common
implementations of TCP do not coordinate congestion control
between streams [10].
In our initial version of ATP, we chose to allow message
transmission over either TCP, or a reliable datagram protocol on top of UDP, which we will refer to as SPP (Sequenced
Packet Protocol). The TCP implementation is the simpler of
the two, and runs over a single TCP connection, but sends messages in fixed-size segments (1 MTU), rather than sending an
entire message at a time. Padding is required for small messages to enable the receiver to detect segment boundaries. It
has the natural advantage of being TCP-friendly. The SPP implementation performs its own buffering, retransmissions and
duplicate suppression at user level. Since it uses UDP datagrams, it requires no padding to distinguish message boundaries, and is therefore more efficient for transmitting small
4 Implementation
messages. Unlike TCP, SPP is not optimised for WAN use,
and has not been thoroughly tested to determine its fairness or
Implementing NAI within the Adaptive Transport Protocol re- behavior under high error rates. It is robust to the errors we
quires some effort, even with the aid of a reliable protocol such have seen in our 802.11b network, and to packet drops caused
as TCP. Bandwidth estimation, managing timers, and provid- by queue overflows in the sender’s network stack. The ATP
ing message-oriented, rather than stream-oriented semantics, experiments in this paper use the version running over SPP.
must be provided on top of the underlying kernel protocol. In
For the purposes of comparison, we have also implemented
addition, TCP’s congestion-control scheme represents a poten- a version of NAI using multiple TCP connections, one per pritial obstacle to our mechanisms for flow control and assigning ority level, which we refer to as MTCP (multi-stream TCP,
priorities to messages.
described in more detail in Section 5). We conducted some
ATP, the complete implementation of NAI which we de- experiments to assess the behavior of concurrent TCP streams
scribe here, runs at user-level over TCP or UDP, and consists and determine if this design was suitable for an NAI impleof approximately ten thousand lines of C code. The other two mentation.
implementations of NAI are described in Section 5.
The graphs in Figure 2 illustrate some cases of competition
between concurrent TCP streams which result in an unequal
division of bandwidth. We conducted experiments to measure
4.1 Reliable transport subsystem
how three concurrent TCP flows compete for bandwidth over
ATP is a reliable protocol, so it must run on top of a reli- a link with a capacity of 256 KB/s. Each flow sends 32 KB
able datagram protocol or a reliable stream protocol. At first messages in a loop for 120 seconds. One of the three senders
glance, TCP would seem to be perfectly adequate, since it has was delayed for a constant amount of time between the combeen highly optimised to perform well both in local-area net- pletion of one send call and the start of the next, to investigate
works and wide-area networks. TCP has also been adapted to the effect of TCP’s slow-start restart [11] for idle connections.
cope with the peculiarities of wireless networks, such as high The expected outcome of these tests would be for the two unerror rates and packet losses [8, 9].
delayed senders to receive a roughly equal share of bandwidth,
However, implementing ATP on TCP requires consider- and the delayed sender to receive a smaller share, decreased in
ing a number of alternatives. Transmitting an entire message proportion to the size of the delay. However, as Figures 2(a)
at once using TCP may result in the message being buffered and 2(b) show, the shares of bandwidth are not constant, and
in the kernel (if there is sufficient buffer space), preventing at some points the delayed sender outperforms the undelayed
an application from deferring the send operation or aborting senders! In addition to looking at sequence number plots, we
it. Once TCP has copied data into the kernel, it is not easy also calculated the times taken for individual send operations
to determine how much of it has been sent. A final difficulty by the delayed sender. Figure 2(b) shows a sequence num4
10000
4700
12000
9000
4600
10000
7000
6000
5000
4000
3000
sequence number (KB)
4500
sequence number (KB)
sequence number (KB)
8000
8000
6000
4000
4400
4300
4200
4100
2000
2000
no delay
delay
1000
0
0
20
40
60
time (s)
80
100
4000
no delay
delay
120
0
0
20
40
(a)
60
time (s)
80
100
120
3900
51
no delay
delay
52
(b)
53
time (s)
54
(c)
Figure 2: Unequal divisions of bandwidth for concurrent TCP connections. Each flow transmits 32 KB messages back-to-back for 2 minutes;
sequence number plots for the connections are shown. In (a), the stream shown by the darkest line pauses for 100 ms between each send call;
in (b), it pauses for 150 ms. Plot (c) is a magnification of the boxed region in (b). Vertical lines in (c) indicate instants when the stream with
the delay between sends completes sending a message: this interval of plot (b) shows a high degree of variation in the bandwidth obtained by
the delayed stream.
ber plot where the delayed sender waits for 150 ms between
send operations; measuring the time between completion of
successive sends gives an average of 0.42 seconds, but a range
from 0.22 to 1.09, almost a five-fold variation (a minimum of
0.22 is possible because the send can buffer data in the kernel
and return fast, overlapping with the delay). This compares to
an expected mean of 0.375 seconds if all the streams received
equal bandwidth. Figure 2(c) shows the region of this test
that the send operation taking 1.09 seconds lies in, with vertical bars indicating the completion times of sends. This type
of unpredictable and uncontrollable contention effect argues
that NAI over multiple TCP streams may ultimately be inferior to other options, particularly in settings where small and
infrequent high-priority messages are intermixed with lowerpriority bulk data transfers.
estimate the total bandwidth available on it, rather than deriving separate estimates for each connection or destination host.
Our current estimator assumes that traffic from protocols other
than ATP constitutes a negligible fraction of the total traffic,
but this restriction would be removed in a kernel version of
ATP.
A further important difference from wide-area bandwidth
estimation is a side-effect of ATP semantics. Since ATP incorporates priorities for messages, an inaccurate estimate can
cause a priority inversion.
The difficulty is that the device driver may buffer datagrams when it is unable to transmit as fast as the incoming
rate. If an over-optimistic bandwidth estimate causes the kernel to buffer datagrams from low-priority messages, these will
hold up the transmission of datagrams from high-priority messages until the send queue is free of low-priority datagrams. It
is impractical to remove datagrams from the send queue, but
some operating systems allow the length of the queue to be
read by applications (for instance, by FreeBSD’s ifmib feature). The ATP bandwidth estimator incorporates a heuristic
to “back off” and reduce its estimate when it detects a backlog
in the send queue.
4.2 Bandwidth estimator
Estimating bandwidth is a necessary component of an adaptive transport protocol, since both the application and the protocol itself rely on this value in order to adapt appropriately to
network changes. ATP requires a bandwidth estimate to fully
implement callback timers, or else a message can never be reported as undeliverable before its callback timer expires.
Much work has been devoted to the general problem of
estimating bandwidth for flows in a wide-area network. Widearea bandwidth estimation schemes must arrive at an estimate
of limiting bandwidth, which lies at some link along the path
between a sender and receiver. In contrast, we assume that the
rate of communication is principally limited by the bandwidth
on the wireless link. Since all communication between the
mobile host and remote hosts must be over this link, we can
The bandwidth estimation algorithm
A straightforward scheme for bandwidth estimation is to count
how many send operations, and of what sizes, complete over
an interval, and divide to find the estimate. This can be inaccurate because the kernel buffers data, both at the protocol level
(in the case of TCP – UDP does no buffering), and at the network device driver. Additionally, the time required to derive an
estimate depends on the amount of data being sent. Blocking
5
55
int curbw;
int staleness = 0;
int polldelay; // configurable, >= 0
check that it exceeds a threshold of 10 packets; the maximum
length allowed is 50 in FreeBSD).
Figure 3 shows pseudocode for the bandwidth estimation
algorithm. It runs once every second, and computes two values based on the statistics obtained over the previous second:
curbw and available. The available value is the estimate of available bandwidth on the wireless link, which is
supplied to the application. The curbw value is the amount of
bandwidth which ATP should restrict itself to using over the
next second. This is an internal ATP statistic, which may be
lower than available if the network interface send queue is
nonempty and there is a consequent risk of priority inversion.
The available value may also be higher if the estimator is
probing the bandwidth. An averaging filter with a window size
of 5 is used to smooth the estimates in order to make them less
sensitive to transient spikes.
If the application has queued more messages than can be
sent in a single second, then the estimator will automatically
detect increases in available bandwidth, since the per-second
usage will increase as the bandwidth increases. However, if the
network is underutilised, then an increase may not be detected
without an additional mechanism. For instance, an application using ATP may use the bandwidth estimate to determine
its mode of operation, and not change into a mode using more
bandwidth unless the estimate goes up. In this case the surplus bandwidth would never be exploited. ATP breaks this
deadlock in two ways. Firstly, in the trivial case where the
application is unwilling to send any data because it believes
the bandwidth is zero, ATP polls the remote host to determine
when bandwidth rises above zero, making a simple packet-pair
estimate [12]. Secondly, ATP probes the bandwidth by speculatively increasing the estimate it gives the application. The
intent behind this mechanism is that the application will eventually decide the estimate is high enough and attempt to exploit
it by sending more data. Figure 3 shows the probe mechanism
as part of the bandwidth estimate routine.
bandwidth_estimate(used, backlog) {
used = maximum(used, filter(used));
if (backlog > MAXIMUM_BACKLOG) {
curbw = used; staleness = 0;
return (used, used - backlog*MTU);
}
else if (used < curbw) {
int probe = PROBE_SIZE;
staleness++;
probe *= staleness / polldelay;
curbw = used;
return (curbw, curbw + probe);
}
else {
staleness = 0;
return (curbw, curbw + PROBE_SIZE);
}
}
Figure 3: The bandwidth estimation algorithm. Every second, ATP
invokes the bandwidth estimator to determine a new estimate (this
is a tuple of the internal estimate and the estimate advertised to the
application). The bandwidth used over the preceding second is averaged with the values for the four preceding seconds, then the new
estimate is generated, depending on the backlog and staleness of the
current estimate. MAXIMUM BACKLOG is set high enough to avoid
transient backlogs (10 in our implementation), and PROBE SIZE is
half the minimum of the send queue capacity and the current estimate.
on a send operation for a large message will delay the estimate
until the send completes. Alternatively, the bandwidth used by
a TCP connection can be derived from TCP’s round-trip time
estimate and the send window size. However, this value reflects how much data has been sent on the connection, and not
the potential capacity of the connection.
ATP derives its estimate by polling the network card for
the amount of data sent and received over the course of each
second. This quantity is then used as a predictor of the bandwidth over the next second. Since the bandwidth reported by
the network card depends on the amount of data which ATP
tries to send, this simple estimate is inaccurate if the true bandwidth is higher than the send rate. Accordingly, the bandwidth
estimator uses a probing scheme to speculatively increase the
estimate.
Estimation relies on three statistics: the observed bandwidth, the length of the network interface send queue (backlog), and the staleness of its current estimate. Staleness measures the number of seconds since the last point at which the
estimate changed, or since there was a “genuine decrease” in
available bandwidth. A genuine decrease can be distinguished
from a decrease in the count of bytes transmitted by detecting that the length of the send queue has increased (in fact, we
4.3 Examples of ATP execution
To place the preceding algorithms in context, we examine some
representative executions of ATP. Figure 4 shows bandwidth
estimates for two examples of ATP execution. The actual bandwidth curves are synthetic, and were generated with the use
of the Dummynet traffic-shaping module [13] (the bandwidth
curves are explained in more detail in section 5).
Graph (a) shows the bandwidth estimates when the system
is saturated: every 0.25 seconds, a new 64 KB message enters
the system, and must be delivered within a second. Between
120 and 220 seconds, almost no messages are admitted, since
the bandwidth estimate is below 64 KB/s. Admission ceases
when the estimate is in the vicinity of 64 KB/s, and resumes
when the estimate has jumped to 140 KB/s from 48 KB/s. An
6
estimate
used
bandwidth
192
160
data rate (kbytes/sec)
160
data rate (kbytes/sec)
estimate
used
bandwidth
192
128
96
64
32
128
96
64
32
60
120
180
time (secs)
240
300
60
(a)
120
180
time (secs)
240
300
(b)
Figure 4: ATP behavior for two workloads. Graph (a) shows bandwidth usage for a workload of 64 KB messages, entering the system every
quarter of a second, with callback timeouts of one second. When bandwidth is less than 64 KB/s, no messages are admitted. Graph (b) shows
a combination workload of high-priority 4 KB messages and low-priority 256 KB messages with long timers.
discarded due to insufficient bandwidth at 147 seconds, before
its timer has expired. The fact that the notification of cancellation arrives at the receiver four seconds later is due to the
backlog in the device driver send queue. Slow delivery of cancellation notifications is tolerable because they serve only to
free buffer space at the receiver.
anomaly is evident at 193 seconds, where the estimate jumps
sharply due to a packet-pair measurement. Though this causes
some messages to be incorrectly admitted, it is quickly rectified.
Graph (b) shows a mixed workload, with both high-priority
and low-priority messages. Every 0.5 seconds, a high-priority,
4 KB message with a 1-second callback timeout enters the system; every 8 seconds, a low-priority, 256 KB message with a
16-second timeout enters. The spikes in the reported bandwidth curve indicate these larger, low-priority messages. The
combination of smaller messages and looser timeouts allows
ATP to make use of the period between 180 and 210 seconds
when bandwidth is at 50 KB/s.
The use of the bandwidth estimate for message admission
is illustrated in Figure 5, which shows part of an execution of
the same workload as in Figure 4(b). Events at the sender are
shown at the left, and at the receiver on the right. Arrows indicate the correspondence between the entry of messages into
the system and their delivery to the receiver. The small, highpriority messages arrive every 0.5 seconds, while a large message arrives every 8 seconds. The decreasing bandwidth estimates correspond to the system entering the zero-bandwidth
region of Figure 4(b). The interval between arrival of a small
message and its delivery lengthens as bandwidth decreases,
and some small messages are dropped due to their timers expiring. It is worth noting that some arrival-to-delivery intervals are greater than one second, the nominal timeout, but this
is due to the timeout only being enforced at the sender, not at
the receiver, in order to avoid requiring clock synchronisation.
While the bandwidth is technically sufficient for delivery of all
the small messages shown on the timeline, a reduction in the
available value after 138 seconds leads to some messages
being discarded when their callback timers expire. Insufficient
bandwidth at 145 seconds causes a new 256 KB message to be
rejected, and the 256 KB message admitted at 137 seconds is
4.4 Adaptation mechanisms
ATP incorporates two mechanisms by which an application
can keep track of bandwidth availability: explicitly, through
the use of bandwidth notifications, and implicitly, by relying
on callback timers and callbacks to express its assumptions
about the bandwidth. In this section, we compare the behavior of these two techniques with a mixed-mode workload and
a bandwidth trace drawn from measurements of our wireless
network (the trace is a subinterval of the trace shown in Figure 1). In addition, we show some effects of varying the poll
delay for the bandwidth estimator, as described in Section 4.2.
The application we tested has four logical modes, corresponding to different levels of bandwidth usage. At each level,
messages are sent with a 1-second timeout, of a sufficient size
and frequency to match the target bandwidth usage, as follows:
level
1
2
3
4
upper bound
100 KB/s
200 KB/s
400 KB/s
none
usage
25 KB/s
100 KB/s
125 KB/s
250 KB/s
total usage
25 KB/s
125 KB/s
250 KB/s
500 KB/s
“Upper bound” refers to the upper limit of bandwidth for transmitting at that level; “usage” refers to the bandwidth usage if
all messages at that level are delivered successfully; “total usage” gives the cumulative figures. Tests were conducted using
two styles of adaptation:
Bandwidth notifications only. Each level corresponds to a mode
of operation; the application registers the low and high ends of
7
small 286
small 287
large 288; small 289
small 290
bandwidth 54005
small 291
small 292
bandwidth 41592
small 293
small 294
bandwidth 38612
small 295
small 296
bandwidth 38612
small 297
small 298
bandwidth 30906
small 299
small 300
bandwidth 29297
small 301
small 302
bandwidth 29297
small 303
small 304
bandwidth 20682
large 305 rejected; small 306
small 307
bandwidth 21266
small 308
small 309
bandwidth 21266
small 310
bandwidth 288 2
bandwidth 14479
bandwidth 54005
bandwidth 14181
136.064
136.564
137.054
137.554
138.064
138.554
139.064
139.564
140.064
140.566
141.056
141.566
142.064
142.564
143.064
143.554
144.064
144.564
145.064
145.554
146.064
146.554
147.054
147.476
136.215 delivered 286
136.675 delivered 287
137.275 delivered 289
138.245 delivered 290
139.277 delivered 291
139.605 delivered 292
140.365 delivered 294
140.696 delivered 295
141.115 delivered 296
142.176 delivered 297
142.546 delivered 298
143.416 delivered 300
143.706 delivered 301
144.406 delivered 302
146.646 delivered 307
147.036 delivered 308
147.786 delivered 309
bandwidth 310 1 148.455
bandwidth 11237
bandwidth 7984
151.203 cancelled 288
bandwidth 5287
Figure 5: Timeline of ATP execution. The section shown is from the execution of the same workload as shown in Figure 4(b). Entry points of
messages into the system are denoted as “small” (high-priority, 4 KB) or “large” (low-priority, 64 KB), followed by a sequence number. The
per-second bandwidth estimate is given in grey (each estimate is computed at the time marked by the line above it). Arrows indicate when
sending an message commences at the sender and receipt occurs at the receiver. Messages after 148.5 seconds, and removal of messages due
to timers, have been omitted – an message without an arrow was dropped due to a timer expiring.
algorithm
poll
bandwidth
callbacks
bandwidth
callbacks
1s
1s
3s
3s
MB transferred by level
1
2
3
4
5.6 18.7
9.7
7.4
6.2 19.9 12.2 10.2
5.8 14.5
6.9
3.2
6.6 18.2
9.4
8.9
total
bw
41.5
48.5
30.4
43.1
44.0
54.1
32.4
47.6
Graphs 6(a) and 6(b) show that the poll delay has an appreciable effect on bandwidth utilization. Slowing down the
rate at which the bandwidth estimate rises may reduce the instability of the mode the application operates in (see the mode
lines for 250-260 seconds in the two graphs), but also leads
to a slow reaction when the bandwidth rises suddenly, since
the application waits until it gets a bandwidth notification before it starts exploiting the new level. As graph 6(c) shows, the
callbacks+priorities scheme is less reliant on the bandwidth estimate, since it always has a large number of messages which
it can potentially send. Comparing the amount of data transferred at each level reveals that the callbacks+priorities scheme
sends more data successfully for both poll delay values, at
the cost of a higher overhead in wasted bandwidth, while the
modal scheme is more conservative. If the higher overhead
can be tolerated, a mixed-mode adaptation scheme therefore
appears more appropriate for bursty applications.
Table 1: Results for adaptation tests. Some results for the two adaptation schemes and poll delay values (the “poll” column) are shown.
The “total” column gives the total throughput of successfully delivered messages, and the “bw” column gives the total bandwidth used
(including incomplete messages).
the bandwidth range for the current level, and ATP notifies it
when the bandwidth estimate moves outside the range. When
at mode , the application sends all messages from levels 1 to
. All messages have the same priority.
Callbacks+priorities. The application transmits without using modes, instead sending messages for all the levels concurrently, but with priorities to rank the messages (level 1 having
the highest, level 4 the lowest priority).
5 Experiments
We have compared the performance of three implementations
We ran experiments using these two adaptation schemes and of NAI, ATP and two simpler TCP-based implementations.
a number of values for the poll delay parameter. Using a Two sets of experiments were performed. First, ATP’s perforbandwidth trace results in a high degree of time-dependence mance for bulk data transfer was measured, without making
in the behavior of the algorithms, which makes direct compar- use of NAI’s extended semantics, and second, ATP and NAIisons under identical circumstances problematic: for brevity, over-TCP were compared for a number of workloads incorpowe only present a few representative results in Table 1. Three rating callback timers and priorities. We describe the experiof these test cases, showing the mode of operation of the ap- mental setup and methodology before presenting the results of
plication over time (or the highest level it sends at over time), the experiments.
appear in Figure 6.
8
800
true bandwidth
bandwidth used
800
true bandwidth
bandwidth used
700
700
600
600
600
500
400
300
bandwidth (KB/s)
700
bandwidth (KB/s)
bandwidth (KB/s)
800
500
400
300
500
400
300
200
200
200
100
100
100
0
0
50
100
150
time (s)
200
250
300
0
0
50
100
(a)
150
time (s)
200
250
300
true bandwidth
bandwidth used
0
0
(b)
50
100
150
time (s)
200
250
300
(c)
Figure 6: Effects of adaptation schemes on a mixed-mode application. These graphs show two bandwidth curves: the upper curve is the
actual available bandwidth from the trace shown in Figure 1, and the lower curve is the bandwidth used by the application. Additionally,
horizontal lines indicate intervals when the application was operating in each of the four modes: a mode line corresponds to the bandwidth
required to deliver all messages in that mode (for callback adaptation, this shows the highest level for which a message was delivered during
each second). Graphs (a) and (b) show examples of the “bandwidth-only” adaptation scheme with poll delays of 1 and 3 seconds. Graph (c)
shows an example of the “callbacks+priorities” adaptation scheme with a poll delay of 1 second. The true bandwidth curve is smoothed for
clarity in these graphs, though not in the actual tests.
5.1 Experimental setup
a queue to be sent. Whenever a send call returns, the first
queued message is sent if less than half of its timeout has exWe ran our experiments on an Aironet IEEE 802.11b wirepired, otherwise it is discarded (this heuristic was intended to
less subnet with a single base station, which was attached to
protect against backlogs when bandwidth was very low). Send
a Ethernet switch. A 1 GHz Celeron desktop computer runoperations are irrevocable. Once a send completes, the time
ning FreeBSD 4.5 served as the receiver. To minimise effects
is compared against the timer to see if it was delivered within
of contention on the wired network, it was attached directly
the timeout. The receiver sends a 1-byte user-level acknowlto the switch. The sender was an 800 MHz Pentium III lapedgement to the sender upon receipt of each message, so as to
top, also running FreeBSD 4.5, and communicating through
eliminate the effect of TCP sends returning early when data is
an Aironet wireless Ethernet card. The advertised throughput
still buffered in the kernel. NAI-TCP is implemented in two
of the Aironet card is 11 Mbps, though in normal use we never
hundred lines of C code.
saw more than 4.9 Mbps. When there were no obstructions or
major sources of interference between the card and base sta- Multi-stream TCP (“NAI-MTCP”). Multiple messages can be
sent concurrently: one connection is opened for each priority
tion, data rates of between 5.6 and 7.4 Mbps were observed.
In order to achieve repeatable results for experiments, we level, and the number of high-priority connections is additionused the FreeBSD Dummynet traffic shaping module [13] to ally controlled by a parameter (we refer to NAI-MTCP1 for
control the bandwidth and round-trip time at the sender ac- NAI-MTCP with one high-priority connection, NAI-MTCP2
cording to a trace file. As we have described in Section 4.4, for two high-priority connections, and so on). Behavior is othwe have found that using real traces of bandwidth in a very erwise the same as TCP with timers (sends cannot be aborted),
high variability in experimental results. To eliminate some of though MTCP can terminate transmission of a message early
this variability, we used a simplified, synthetic bandwidth trace if its timer expires. NAI-MTCP consists of two thousand lines
of C code, compared to ten thousand lines for ATP.
which was already shown in Figure 4.
5.2 Experimental methodology
5.3 Bulk data transfer
We compared the ATP implementation of NAI with two TCP
implementations, which incorporate callback timers and priorities, while excluding more complex features of ATP, such as
the bandwidth estimator. Both TCP implementations of NAI
run at the user level, but differ in their degree of sophistication:
The raw performance of ATP was measured by a series of
throughput tests, using message sizes starting at 1 KB, and
increasing by powers of two up to 1 MB. Inter-arrival spacing
was negligible, and the duration of the test was set so that each
test transferred a total of 64 MB. All the messages were given
a uniform callback timeout long enough to ensure that they
would be sent without the risk of being rejected, and bandwidth was set to 512 KB/s. The experiments were conducted
TCP with timers (“NAI-TCP”). The sender opens a single,
blocking connection to the receiver. New messages wait on
9
1
0.9
0.8
0.8
0.8
0.7
0.6
0.5
0.4
0.3
% messages delivered
1
0.9
% messages delivered
% messages delivered
1
0.9
0.7
0.6
0.5
0.4
0.3
0.7
0.6
0.5
0.4
0.3
0.2
0.2
0.2
0.1
0.1
0.1
0
0
uniform
prioritised
reversed
fs
overload
uniform
prioritised
reversed
tests
(a) High-priority message delivery
fs
0
overload
ATP
NAI−TCP
NAI−MTCP1
NAI−MTCP2
NAI−MTCP3
NAI−MTCP4
low
tests
medium
high
priority
(b) Low-priority message delivery
(c) Random workload
Figure 7: Performance of NAI implementations compared. Graphs (a) and (b) show the relative proportions of high- and low-priority
messages delivered by ATP, NAI-TCP and NAI-MTCP for each workload, normalised by the total number of messages of the appropriate
priority in the workload. Graph (c) does the same for the three priority levels in the “random” workload. Each bar shows the average of five
trials.
using only synchronous or only asynchronous sends. For comparison, the same experiments were run using kernel TCP with
a single connection.
The results of these tests were extremely uniform for both
ATP and TCP. Both protocols had a peak throughput of 512
KB/s, with very little variation once the peak was achieved
(differences of at most one IP datagram from one second to
the next). The only significant difference between ATP and
TCP was in startup time: TCP doubles its send window size
after every round-trip, so it was able to reach the peak bandwidth within a second. ATP is more pessimistic, only increasing the amount of data it sends once per second; it took about
ten seconds for the bandwidth usage to reach 512 KB/s. Because the sender and receiver have fast CPUs, the selection
of synchronous or asynchronous sends made no difference to
ATP performance, despite the fact that asynchronous calls allow pipelining of sends, while synchronous calls are blocking.
test name
uniform
prioritised
reversed
filesystem
overload
random
priority
high
high
high
low
high
low
high
low
high
low
all
size
4 KB
32 KB
4 KB
256 KB
64 KB
4 KB
64 B
64 KB
16 KB
64 KB
1-64 KB
timer
1s
4s
1s
16 s
16 s
1s
0.5 s
1s
1s
1s
0.5-4 s
delay
0.5 s
2s
0.5 s
8s
8s
0.5 s
0.1 s
1s
0.25s
0.5s
0.5 s
n
600
150
600
38
75
600
3000
300
1200
600
600
Table 2: Parameters for the priority and deadline tests. Messages
in each workload are divided by priority. The columns for “delay”
and “n” give the inter-arrival spacing and the number of messages,
respectively. Sizes and callback times for the random test are distributed uniformly within the ranges indicated.
sages at high priority and larger ones at low priority. The “reversed” test reverses these priority assignments. The “filesystem” workload is intended to model a mixture of large file
To compare the three implementations of NAI, we used six
chunk retrievals and cache validation calls, as might be enworkloads, each mixing messages of different priorities and
countered in a typical distributed file system. The “overload”
callback timeouts, as shown in Table 2. When workloads were
test sends messages at a very high data rate. Finally, the “rantested over ATP and NAI-MTCP, asynchronous message transdom” test is unusual in that characteristics for its messages
mission was used, but NAI-TCP supports only synchronous
were generated randomly according to a uniform distribution,
transmission. As a consequence, ATP and NAI-MTCP are able
and priorities were randomly selected from low, medium or
to preempt low-priority messages with higher-priority ones.
high levels (resulting in 205, 191 and 204 messages respecAll of the workloads have at least two classes of messages,
tively). All the tests use the trace of bandwidth described
a high-priority and a low-priority class. The objective of these
earlier, which varies bandwidth between 0 and 200 KB/s, and
tests is to measure how many high-priority messages each prolasts for five minutes. While these workloads are not realistic,
tocol can deliver before their send timers expire. A secondary
together they serve to provide an indication of how the three
consideration is how many low-priority messages are delivNAI implementations perform under various conditions.
ered, since a trivial protocol might refuse to deliver all lowFigures 7(a) and 7(b) plot the results of the first five tests,
priority messages! The “uniform” test sends all messages at
according to message priority. In the uniform and reversed
the high priority, while the “prioritised” test sends small mes-
5.4 Priority and deadline workloads
10
tests, there is no prioritisation, or the benefit of prioritisation
is small, due to large timer values for high-priority messages.
Here the differences between the implementations is minor.
However, in cases where there is significant contention for
bandwidth (the filesystem and overload tests, and to a lesser
extent, the prioritised test), ATP performs the best, since it is
able to devote all available bandwidth to sending high-priority
messages. In contrast, NAI-TCP ignores priorities, and NAIMTCP always devotes one connection to low-priority messages (though the more high-priority connections it has, the
less bandwidth low-priority messages will receive).
Comparing the performance of ATP and NAI-MTCP reveals the disadvantage of the MTCP design: it is subject to
contention between the concurrent streams, and the best number of streams to assign to high-priority messages varies for
different workloads. The prioritised test delivers roughly the
same number of messages irrespective of the number of highpriority streams, but the performance for the reversed test degrades with more streams, while that of the overload test increases. The critical factor is whether transmitting multiple
messages concurrently can result in all of them being dropped
when their send timers expire. The file system and overload
workloads demonstrate this phenomenon most strongly, as ATP
significantly outperforms NAI-MTCP because it always sends
messages serially. It can also vary the order of message transmission, and interrupt transmission of a low-priority message
when a higher-priority message arrives. The poor performance
of NAI-MTCP in delivering low-priority messages in the overload test is due to the fact that NAI-MTCP is unable to discard
a message early if it is undeliverable before its timer expires:
without estimating the available bandwidth, the protocol cannot avoid wasting bandwidth on such a message.
Figure 7(c) shows the results for the “random” workload.
NAI-TCP slightly outperforms ATP at two priority levels: here
the fact that it ignores priorities proves to be a benefit, since
it does not preempt messages and so does not devote bandwidth to a low-priority message, only to discard it when a
higher-priority message arrives. NAI-TCP outperforms ATP
by 2.5% in delivering high-priority messages, due to ATP rejecting messages at points where it underestimates the current
bandwidth. As in the filesystem test, NAI-MTCP’s use of multiple streams results in multiple messages being transmitted
concurrently.
under which TCP fails to provide a fair bandwidth division
between concurrent streams, which may undermine the effectiveness of the callback timer implementation in NAI-MTCP.
6 Related work
While there has been a great deal of research in adapting applications and protocols to variations in network characteristics,
and in bandwidth-division algorithms, for the sake of brevity
we will mention only a few related projects.
We have already proposed web browsing [2] and remote
file systems [4] as specific applications which can adapt to
bandwidth availability; several systems provide more general
adaptation mechanisms to applications. Odyssey [3] allows
applications on a mobile host to adapt to changes in availability of many kinds of resources; the bandwidth callback
mechanism in ATP is copied from Odyssey’s upcalls. Rover
[14] focuses on placing components of mobile applications
to control communication between mobile clients and servers.
ATP has some similarities to Rover’s Queued RPC. HATS [15]
regulates the transmission of documents over a bandwidthconstrained link, dividing them into hierarchies of data units
and allowing policies for scheduling retrieval of particular types
of data units to be set for the entire system.
ATP incorporates a simple scheme for a host to determine
the bandwidth available to it on a wireless link; more sophisticated schemes exist, particularly for estimating bandwidth
along a path in a wide-area network [16, 17]. The Odyssey
system incorporates a scheme for determining available bandwidth by comparing the expected time to transmit and acknowledge a message with its actual transmission time [18].
The problems with bandwidth allocation between multiple
flows discussed in Section 4.1 are not new. T/TCP [19] and
TCP Fast Start [20] improve TCP performance for small data
transfers by caching and reusing connection state. Henderson
et al [21] have investigated the effects of TCP algorithms on
bandwidth allocation between concurrent connections. Congestion Manager [10] and Ensemble-TCP [22] share state information between connections to a remote host and allow
the aggregate bandwidth to be divided among state-sharing
connections by a priority mechanism. TCP Nice [23] adjusts
TCP’s congestion control algorithm to ensure that “background”
TCP flows have lower priority than regular flows. These sysTo summarise, in most of the cases considered, both NAI- tems improve performance without compromising TCP conMTCP and ATP represent an improvement over NAI-TCP in gestion control. In contrast, ATP aims to provide an mechathe proportion of high-priority messages delivered. However, nism which allows applications to adapt bursty network comATP is able to outperform NAI-MTCP by a factor of 30% or munication to bandwidth availability, and to express timing
more for some workloads, including network communication requirements. ATP over TCP allows ATP to be used in a WAN
typical of a distributed file system. ATP is also able to abort while remaining TCP-friendly.
a message early when it discovers that insufficient bandwidth
exists to deliver it before its callback timer expires. Additionally, as we have shown in Section 4.1, there are conditions
11
7 Conclusion
We have described NAI, a network-aware API for adaptive applications running on a wireless host, which allows an application to be informed of the state of the network and the messages it sends, and to adjust its behavior accordingly. We have
also described our ATP implementation of NAI and how it adjusts to changes in bandwidth, as well as demonstrating that
an application using ATP can accurately match its “mode of
operation” to the available bandwidth. Finally, we have compared alternatives for implementing NAI: using a bandwidth
estimator and a reliable datagram protocol over UDP (ATP), or
alternatively, over multiple TCP channels (MTCP). We favor
the ATP implementation because it has superior performance
and predictability, but in settings where UDP is inappropriate,
the MTCP implementation is an acceptable alternative, despite
the contention effects described in Section 4.1.
As we have illustrated in Section 4.4, ATP enables a high
quality of adaptation for applications, and adaptation using priorities can provide better performance than a traditional modal
adaptation scheme. The fundamental premise motivating our
work has been that this type of priority-driven adaptation is
vital in developing more intelligent mobile applications, and
ATP appears to be a suitable and effective basis on which to
build them.
Future work on ATP includes comparing the appropriateness of using TCP against the advantages of SPP (our reliable datagram protocol), in order to adapt ATP to operate in
a wide-area network. We also intend to investigate techniques
for making ATP’s bandwidth estimator more accurate and responsive in detecting bandwidth increases. ATP is currently
being used in the development of an adaptive distributed file
system for mobile clients.
on-demand dynamic distillation,” in Proceedings of the
Seventh International Conference on Architectural Support for Programming Languages and Operating Systems, Cambridge, Massachusetts, Oct. 1996, pp. 160–
170.
[3] Brian D. Noble and Mahadev Satyanarayanan, “Experience with adaptive mobile applications in Odyssey,” Mobile Networks and Applications, vol. 4, no. 4, 1999.
[4] James J. Kistler and M. Satyanarayanan, “Disconnected
operation in the Coda file system,” ACM Transactions on
Computer Systems, vol. 10, no. 1, pp. 3–25, 1992.
[5] David D. Clark and David Tennenhouse, “Architectural
considerations for a new generation of protocols,” in Proceedings of the ACM SIGCOMM ’90 Conference, Sept.
1990.
[6] Alan Demers, Srinivasan Keshav, and Scott Shenker,
“Analysis and simulation of a fair queueing algorithm,”
in Proceedings of the ACM SIGCOMM ’89 Conference,
Austin, Texas, 1989, pp. 1–12.
[7] K. Ramaritham, J. A. Stankovic, and P. Shiah, “Efficient scheduling algorithms for realtime multiprocessor
systems,” IEEE Transactions on Parallel and Distributed
Systems, vol. 1, no. 2, pp. 184–194, 1990.
[8] Hari Balakrishnan, Venkat Padmanabhan, Srinivasan Seshan, and Randy H. Katz, “A comparison of mechanisms
for improving TCP performance over wireless links,”
IEEE/ACM Transactions on Networking, vol. 5, no. 6,
pp. 756–769, Dec. 1997.
[9] A. Lahanas and V. Tsaoussidis, “Experiments with adaptive error recovery strategies,” in Proceedings of IEEE
ISCC 2001, July 2001.
Acknowledgements
We would like to thank Alan Demers, Emin Gün Sirer, Robbert van Renesse, Eva Tardos and Werner Vogels for many
comments and suggestions over the course of this work. We
also thank Venugopalan Ramasubramanian, Indranil Gupta,
Ranveer Chandra and Rimon Barr for helpful discussions and
comments on this and earlier versions of the text of this paper.
[10] D. Andersen, D. Bansal, D. Curtis, S. Seshan, and
H. Balakrishnan, “System support for bandwidth management and content adaptation in Internet applications,”
in Proceedings of 4th Symposium on Operating Systems
Design and Implementation, San Diego, CA, Oct. 2000,
pp. 213–226.
References
[11] Van Jacobson, “Congestion avoidance and control,” in
Proceedings of the ACM SIGCOMM ’88 Conference,
Aug. 1988.
[1] Brian D. Noble, M. Satyanarayanan, Giao T. Nguyen,
and Randy H. Katz, “Trace-based mobile network emulation,” in Proceedings of the ACM SIGCOMM ’97 Conference, Cannes, France, Sept. 1997, pp. 51–62.
[2] Armando Fox, Steven D. Gribble, Eric A. Brewer, and
Elan Amir, “Adapting to network and client variation via
12
[12] Srinivasan Keshav, An Engineering Approach to Computer Networking, pp. 424–426, Addison-Wesley, 1997.
[13] Luigi Rizzo, “Dummynet: a simple approach to the evaluation of network protocols,” ACM Computer Communication Review, vol. 27, no. 1, Jan. 1997.
[14] Anthony D. Joseph, Joshua A. Tauber, and M. Frans
Kaashoek, “Mobile computing with the Rover Toolkit,”
IEEE Transactions on Computers: Special issue on Mobile Computing, vol. 46, no. 3, pp. 337–352, Mar. 1997.
[15] Eyal de Lara, Dan S. Wallach, and Willy Zwaenepoel,
“HATS: Hierarchical adaptive transmission scheduling
for multi-application adaptation,” in Proceedings of the
2002 Multimedia Computing and Networking Conference, San Jose, California, Jan. 2002.
[16] Manish Jain and Constantinos Dovrolis, “End-to-end
available bandwidth: Measurement methodology, dynamics, and relation with TCP throughput,” in Proceedings of the ACM SIGCOMM 2002 Conference, Aug.
2002.
[17] Kevin Lai and Mary Baker, “Nettimer: a tool for measuring bottleneck link bandwidth,” in Proceedings of the
USENIX Symposium on Internet Technologies and Systems, Mar. 2001.
[18] Brian D. Noble, Mobile Data Access, Ph.D. thesis,
Carnegie Mellon University, May 1998.
[19] R. Braden, “T/TCP – TCP extensions for transactions
functional specification,” RFC 1644, Internet Engineering Task Force, July 1994.
[20] V. Padmanabhan and R. Katz, “TCP Fast Start: a technique for speeding up web transfers,” in Proceedings of
Globecom 1998, 1998.
[21] T. H. Henderson, E. Sahouria, S. McCanne, and R. H.
Katz, “On improving the fairness of TCP congestion
avoidance,” in IEEE Globecom Conference, 1998.
[22] Lars Eggert, John Heidemann, and Joe Touch, “Effects
of Ensemble-TCP,” ACM Computer Communication Review, vol. 30, no. 1, pp. 15–29, Jan. 2000.
[23] Arun Venkataramani, Ravi Kokku, and Mike Dahlin,
“TCP Nice: A mechanism for background transfers,” in
Proceedings of the 5th Symposium on Operating Systems
Design and Implementation. USENIX Association, Dec.
2002.
13