A N A L Y S I S ...
advertisement

Nuclear Engineering and Design 67 (1981) 137-141
North-Holland Publishing Company
137
ANALYSIS OF PUMP START-UP TRANSIENTS
R.B. G R O V E R a n d S.M. K O R A N N E
Reactor Engineering Division, Bhabha Atomic Research Centre, Bombay 400 085, India
Received 3 February 1981
A computer programme has been developed to study pump start-up transients. Predictions of this programme have been
verified experimentaUy.Parametric studies indicate that an increase in fluid inertia increases the acceleration head, while an
increase in the moment of inertia of rotating parts decreases the acceleration head. Also for systems where the ratio of moment
of inertia of rotating parts to fluid inertia is low, pump speed goes marginally beyond the steady speed during the start-up
transient.
1. Introduction
During the starting of a centrifugal pump and prior
to the time normal flow is reached, certain transient
conditions can produce heads and consequently require
torques much higher than design. In some cases selection of the driver and the pump must be based on
starting rather than on normal flow conditions. If the
system contains an appreciable amount of liquid, the
inertia of the liquid mass could offer a significant
resistance to any sudden change in velocity. Upon starting a primed pump and system without a valve, all the
liquid in the system accelerates ,from rest to final condition of steady flow. The actual total system-head resistance curve at any instant during start-up will be the
sum of the frictional resistance plus the inertial resistance. The inertial system head produced momentarily
on starting, particularly high-specific speed pumps, is
important when considering the duration of high driver
torques and currents and the pressure rise in the system.
To calculate the time to accelerate a centrifugal pump
from rest and the total system resistance curve during
start-up commonly used solutions neglect kinetic energy
given to the fluid [1,2]. Boyd et al. [3] have analyzed
transient flow performance in a multiloop nuclear reactor system taking into account the kinetic energy of the
fluid, but they have mostly concentrated on flow coast
down. They have given some results for pump start-up,
but detailed parametric studies are not given. Also they
have not compared their results with experiments. With
a view to understand the influence on start-up of the
two most important parameters, viz. inertia of the rotating parts and inertia of the fluid, a computer pro-
gramme has been developed to predict the total system
resistance curve from given design data. Predictions of
this programme have been verified experimentally. This
note gives the basic equations, the solution procedure,
the experiment conducted and a few case studies.
2. Mathematical model
When a pump is started, its driver has to provide
torque for the following:
(i) Overcoming frictional resistance offered to the
flow of fluid by the piping, valves etc.,
(ii) Overcoming frictional torque for the rotating
parts i.e. pump losses;
(iii) Acceleration of rotating parts;
(iv) Acceleration of fluid contained in the system
piping.
When the pump attains steady speed, no torque is
required for acceleration. Torque is, then, needed only
for overcoming pump losses and frictional resistance to
flow of fluid in the system piping. Each of these torques
is discussed hereafter:
(a) Head required to overcome friction can be calculated by normal procedure. To overcome this head,
driver has to supply torque Tf, which is given by
Tf-
pghrQ
20rN"
(1)
(b) Driver also has to provide torque to overcome
pump losses. This data has to be obtained from the
pump manufacturer and will take the following func-
0 0 2 9 - 5 4 9 3 / 8 1 / 0 0 0 0 - 0 0 0 0 / $ 0 2 . 7 5 © 1981 N o r t h - H o l l a n d
138
R.B. Grover, S.M. Koranne / Analysi,s of pump start-up transients
tional form:
Tpl = dp( N,Q ).
(2)
(c) Torque required to accelerate rotating parts is
given by the following expression:
TA,R = 2 ~ I ( d N / d t ) .
(3)
Substituting values of various torques from relations
written earlier yields:
Tm(U ) = 2 ~ r l - ~ + ~pghaQ
+ ~oghfQ
-+qJ(N,Q).
dN_
dt
(d) Torque required to accelerate the fluid is given by
the following expression:
rA.swhere
pghaQ
2,N '
ha
(4)
is the acceleration head and is given by
h a _ I dQ
g dt Iv"
(5)
I v is a measure of inertia of the fluid contained in the
piping and is given by
L~,j
1
1 I
2~r~ Tm(N)
pgh,Q
2¢rU
pghfQ
}
2z'N
q~( N , Q )
.
(8)
This equation has to be integrated to obtain the complete start-up transient. In order to integrate it, the
i'elationship between Q and N must be known. Additional information is needed to determine this relationship. This relationship depends on driver speedtorque characteristics, pump characteristics and system
characteristics. Driver speed-torque characteristics are
normally available from the manufacturer or may be
determined experimentally. Pump characteristics at the
rated speed are available from the manufacturer and
can be represented by the following equation:
Hp(Q) = DQ z + BQ+ C.
Using homologous theory, this may be generalized [4],
~ At, 1
i=1
j-I
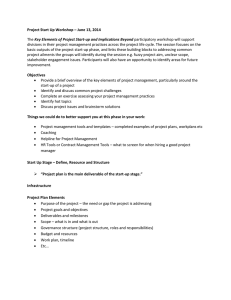
Here it is assumed that the piping system consists of n
sections in series and the i th section consists of m
parallel paths as shown in fig. 1. Pressure drop across
the ith path d P i is related to flow, Q~./, through t h e j t h
parallel path by the equation
At steady state,
Hp =h r ,
(10)
while during start-up,
d P, - ki.jQi, i .
H p = h f +ho.
During start-up, the following relation exists between various torques:
Also at steady state,
--
2
T m = TA. R -}-
TA, S q- Vf -4- rp.
(7)
dN/dt=O.
(12)
Eq. (8) therefore reduces to
Tm(N~) - pghfQs
2~rN'
"tl-2
71-1
Fig. 1. A piping network, showing system of numbering the
branches.
(11)
~-4,(Q~,N,).
(13)
Steady state flow rate, Q~, and steady state speed,
N~, can thus be obtained from simultaneous solution of
eqs. (9) and (13). All this information can then be used
to integrate eq. (8). A computer programme called Pump
Start-up Transient (PST) was written to numerically
solve these equations. Predictions of the programme
were compared with the experimental results obtained
from a particular pumping system. This is discussed in
the next section.
R.B, Grover, S.M. Koranne / Analysis of pump start-up transients
139
3, Experimental verification
.....
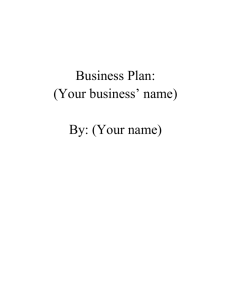
A simplified sketch of the moderator cooling circuit
of a research reactor on which the experiment was
conducted to verify the predictions of the computer
programme is given in fig. 2. In this circuit pressure in
the gas space above the moderator in the reactor vessel
is held constant by a feed and bleed system. Level of the
moderator in the vessel was kept constant during the
experiments. This maintained the pressure at the bottom of the reactor vessel at a constant value during the
start-up transient. Further, a pressure tap suitable for
installation of a transducer was available only at some
distance from the delivery of the pump and was used for
recording the pressure transient. A strain gauge type
transducer was used for converting the pressure signal
into an electrical signal and was recorder on a fast
recorder (make: Encardio-rite).
For this circuit under steady state conditions,
30
12
/'2 = d P 2 f + P ,
and during start-up
PE=dPEf +dP2a + P.
The programme PST calculates head developed by the
pump as a function of time. Pressure at any point in the
circuit can be easily calculated. For example P2 will be
given by
P2 = k f d P t + k ~ d P a + P ,
//
/
0
0.0
I
I
I
OQ
1.6
24,
I
3"Z
TIME IN SECONDS
Fig. 3. Comparison of predictions with experimental results.
(14)
and
where
kf-
PREDICTIONSOF THE COI~
EXPERIMENTAL CURVE
dP2f, s
dpf, s ,
ka--
L2/.42
3
(15)
(16)
L,/A,
i=1
GA$ LINES
II
V - ~ S T O R A G E TANK
L ~
,~,,,,~,,-ACONTROLVALVEAND
<~a A GLOOEVAL~E
1
~ :
--"
'--REACTORVESSEL
Using these relations and the programme PST, pressure
transient at the point 2 was calculated. Fig. 3 gives
experimental results and also the predictions based on
the code PST. Excellent agreement may be noted. An
error analysis indicated that experimental results are
within -+3.1%.
I ~r-t- cONSTANTPRESSURE
]
P
4. Case studies
]
P2
/'~JI--BANK OF THREE
IL~J~
PREHE:TREEXCHANGERS
TRANSDUCER
FOR THIS CIRCUIT I F s 131132~m"1
I =
0"2 k9. "m2
Fig. 2. Simplified hydraulic circuit.
The computer programme was used to study the
influence of moment of inertia of the rotating parts and
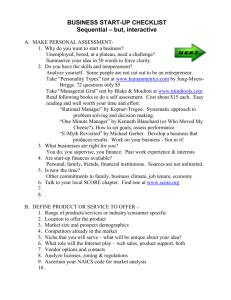
fluid inertia on start-up transient. Fig. 4 gives head
versus flow characteristics of a centrifugal pump used in
the study. It also gives system head, acceleration head
and total system resistance versus flow during start-up.
140
R.B. Grover, S.M. Koranne / Analysis of pump start-up transients
NORMAL OPERATING POINT "' , /
/
I~TOTAL SYSTEM RESISTANCE
/ D U R I N G START-UP
1"50
o
1,35
I
I----PUMP TOTAL HEAD AT RATED
/
1
0-2
2
0-5
1"50
3
e,h
< 1-35
IF
1-0
13832 an'~-1
-
TOTAL SYSTEMRESISTANCE
1"20
....
ACCELRATION HEAD
1.05
-
0.90
~0.gO
i,
Z
o 0.75
zo
<.
I IN KS.nY"
/
/
1"20
1~
?
CURVE No.
y
/'q'-SYSTEM HEAD
('ALL F R I C T I O N }
~
o.~
0"45
o
¢J
,tit.
//
/'~'~
ACCELRATION
0-75
1
0"60
"-%
0.45
\\x
< 0.~
O'3C
....
~ ~ ~
\\
O
0'1~0 04 0.2 00 0"4 0.S 0"6
i
1.0 1.1
FLOW AS FRACTION OF RAT~'DFLOW
Fig. 4. Transient system head during pump start-up for the
system under study.
0"7 0'8
0.9
F r o m this figure it may be noted that total system
resistance passes, through a m a x i m u m at 72.5% of rated
flow. Acceleration head increases from zero to a maxim u m at 49.6% of rated flow a n d then again drops to
zero. It was also n o t e d that speed goes beyond the rated
speed by 0.214% at 0.9t seconds after start-up and then
settles down to rated speed at 2.23 seconds after start-up.
If the m o m e n t of inertia of the rotating parts is
increased, the complete transient changes. Results for
this case are given in fig. 5. If m o m e n t of inertia is very
high, total system resistance no longer passes through a
m a x i m u m , and p u m p speed rises to its rated value
0"00
I
•
.
I
I
a
a |
I ~a
0'0 04 0"2 03 0.4 0,5 0.6 0"7 0'~ 0"9 1"0
FLOW AS FRACTIONOF RATED FLOW
Fig. 5. Influence of moment of inertia of rotating parts on total
system resistance and acceleration head during start-up.
monotonically. Also the p u m p takes longer to reach the
rated conditions. O n the other h a n d , if I F is increased,
acceleration head increases and so m a x i m a in the total
system resistance curve becomes more conspicuous; reverse occurs if I F is decreased as shown in fig. 6. Changes
in I F do not have any appreciable influence on the rate
of rise of speed, but it does influence the rate of rise of
flow. Table 1 gives a summary of the results. It m a y be
n o t e d that the a m o u n t by which speed overshoots, increases as I F is increased. However, speed c a n n o t go
m u c h b e y o n d the rated speed because of the fact that in
a n induction m o t o r m a x i m u m speed is limited by sync h r o n o u s speed.
Table 1
Summary of results a
Sr.
no.
Moment
of
inertia
(kgm 2)
IF
(m- t )
Maximum
speed
ratio
during
transient
Time after
start-up
when maximum speed
occurs
(sec)
Maximum
head
developed
during
transient
(sec)
Time after
start-up
when maximum
head is developed
(sec)
Total time
to attain
steady
conditions
(sec)
1
2
3
4
5
0.2
0.2
0.2
0.5
1.0
13832
27664
6916
13832
13832
1.00214
1.00578
1.00019
1.00006
1.00000
0.9105
0.8955
0.9655
2.482
5.327
61.93
64.86
58.59
58.16
57.80
0.8355
0.8505
0.8705
2.2250
4.7860
2.230
3.915
1.435
3.242
5.327
a Steady state h e a d : 57.79 m, steady state f l o w : 0.015729 m3/s.
R.B. Grover, S.M. Koranne / Analysis of pump start-up transients
-1
I F IN "m
CURVE No.
1
6916
2
13632
3
2766/,
141
going through the manuscript and giving useful comments. Thanks are also due to the instrumentation
groups of the Reactor Engineering Division and the
Reactor Operations Division for their help in experimental work.
MOMENT OF INERTIA'~ 0.2~.1m2
OF ROTATING PARTS~
1.50
TOTAL SYSTEM RESISTANCE
Q 1.35
~
....
Nomenclature
ACCELRATION HEAD
1-20
3
o.,o
.o.Ts
<[
.- o.,,
1"
//'V:
.o.,o I / . S - y
0-0C
0.0
/,
__Z,.
....
......
\
",
---.',,
'
J
'
~
i
J
~
~
0.1 0.2 0.3 0.4 0,5 0.6 0.7 0.8
FLOW AS FRACTION OF FLOW
! !
0.9 1.0
Fig. 6. Influence of I v on total system resistance and acceleration head during start-up.
5. Concluding remarks
The results presented in section 3 demonstrate the
capability of the calculation procedure to predict pump
start-up transients. From the case studies presented the
following conclusions can be drawn:
(a) For systems, where the ratio of moment of inertia
of rotating parts to I F is low, not only pressure, but
pump speed also goes marginally beyond the steady
speed during the start-up transient.
(b) Any change in I F does not appreciably influence
the rate of rise of pump speed, while a change in
moment of inertia of rotating parts does influence the
rate of rise of pump speed. However, changes in both
do influence the rate of rise of flow.
(c) An increase in I v increases acceleration head,
while an increase in the moment of inertia of the
rotating parts decreases it.
Acknowledgement
The authors wish to thank Shri S.K. Mehta and Shri
V. Venkat Raj of the Reactor Engineering Division, for
A
B,C,D
dP
g
h
I
Iv
k
L
N
P
Q
t
T
to
Area of cross-section of a pipe (m2)
Constants in eq. (15)
Pressure difference
Acceleration due to gravity, 9.81 m / s 2
Head (m)
Moment of inertia of rotating parts (kg.m2)
A measure of fluid inertia defined by eq. (14).
Constant defined by eq. (6).
Length of pipe (m)
Speed of rotation (rad/s)
Pressure
Flow rate (m3/s)
Time (s)
Torque (N.m)
Density (kg/m 3)
Subscripts
1,2,3, Sections of the circuit indicated in fig. 3
a
A,R
A,S
f
m
P
pl
S
Acceleration
Acceleration of rotating parts
Acceleration of system fluid
Friction
Motor
Pump
Pump losses
Steady state
References
[1] I.J. Karassik et al., Pump Handbook (McGraw-Hill, New
York, 1976) pp. 9-18.
[2] L. Joseph and F.A. Hammil, Start-up pressures in short
pump discharge lines, J. Hyd. Div., Proc. ASCE 98 (July
1972) 1125.
[3] M.G. Boyd et al., Transient flow performance in a multiloop nuclear reactor system, Nucl. Sci. Engrg. 9 (1961) 442.
[4] E.B. Wylie and V.L. Streeter, Fluid Transients (McGrawHill, New York, 1978) p. 104.