Contents

Contents
1 Atmos & Ocean Thermodynamics 5
1.1
Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.1.1
Systems & States . . . . . . . . . . . . . . . . . . . . . .
8
1.1.2
Thermodynamic Processes & Equilibrium . . . . . . . . .
10
1.1.3
Temperature . . . . . . . . . . . . . . . . . . . . . . . .
10
1.1.4
Equations of State . . . . . . . . . . . . . . . . . . . . .
11
1.2
The First Law and its Consequences . . . . . . . . . . . . . . . .
14
1.2.1
The First Law . . . . . . . . . . . . . . . . . . . . . . . .
14
1.2.2
The Calculus . . . . . . . . . . . . . . . . . . . . . . . .
16
1.2.3
Some Consequences of the First Law . . . . . . . . . . .
20
1.3
The Second Law and its Consequences . . . . . . . . . . . . . . .
24
1.3.1
Carnot Cycles . . . . . . . . . . . . . . . . . . . . . . . .
24
1.3.2
The Second Law . . . . . . . . . . . . . . . . . . . . . .
25
1.3.3
The Clausius Inequality . . . . . . . . . . . . . . . . . .
26
1.3.4
Entropy . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
1.3.5
Some Consequences of the Second Law . . . . . . . . . .
29
1.4
Phase Changes . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
1.4.1
Clausius Clapeyron . . . . . . . . . . . . . . . . . . . . .
35
1.4.2
Condensate . . . . . . . . . . . . . . . . . . . . . . . . .
37
1.4.3
Moist Enthalpy . . . . . . . . . . . . . . . . . . . . . . .
38
1.4.4
Equivalent Potential Temperature . . . . . . . . . . . . .
39
2 Thermodynamic Processes, and Convection 45
2.1
Aerological Diagrams . . . . . . . . . . . . . . . . . . . . . . . .
45
2.1.1
Pseudo-Adiabats . . . . . . . . . . . . . . . . . . . . . .
49
2.1.2
Polytropic Processes . . . . . . . . . . . . . . . . . . . .
51
2.1.3
Soundings . . . . . . . . . . . . . . . . . . . . . . . . . .
52
2.2
Mixing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
2.2.1
Saturation by isobaric mixing . . . . . . . . . . . . . . .
54
1
2 CONTENTS
2.2.2
Buoyancy Reversal . . . . . . . . . . . . . . . . . . . . .
55
2.2.3
Mixing Diagrams . . . . . . . . . . . . . . . . . . . . . .
56
2.3
Stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
2.3.1
Moist convective instability . . . . . . . . . . . . . . . .
59
2.3.2
CAPE . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
2.3.3
Oceanic convection . . . . . . . . . . . . . . . . . . . . .
63
Preface
These notes emerged from a graduate course which I used to teach at the University of California Los Angeles. The course was ten weeks and tried to set the foundations for subsequent studies of convection and small scale processes in the atmosphere. In this version I try to capture some of the main ideas from these notes, augmented by material on ocean thermodynamics. My emphasis is on a theoretical development of the subject matter. The phenomenology is developed in a parallel class Atmospheric & Oceanic Sciences 200B. Sources for these notes and suggestions for further reading are provided in the section on “Further Reading” at the end of each Chapter.
3
4 CONTENTS
Chapter 1
Atmosphere and Ocean
Thermodynamics
1.1
Structure
The atmosphere, or air, as we experience it, is a multi-component gas in which a great variety (if not great amount) of finescale particulate matter is suspended.
The gas phase constituents include several major gases (Nitrogen, Oxygen, Argon) which through the current era have existed in a relatively fixed proportion to one another. To a large degree these determine the thermodynamic properties of what we called dry air, that is an ideal mixture composed of 78.11% N
2
, 20.96% O
2 and 0.93% Ar. Real air contains slightly less of each of these constituents so as to accommodate variable vapors such as carbon dioxide and water, along with a host of seemingly minor gases (e.g., Neon, Helium, Methane, Nitrous Oxide, Ozone) some of which can be important for determining the radiative properties of the atmosphere and the quality of the air we breath. Of the variable constituents, water is the most striking as it ranges from abundances of nearly zero to as much as 4% by volume. Because of its proclivity to change phase and the manner in which these phase changes affect the local temperature on the one hand, and foster diverse interactions with radiant energy on the other, water has the capacity to strongly interact with atmospheric flows over a range of timescales, from minutes to millennia or longer. In this sense the simplest, accurate description of the dynamic atmosphere is best formed by viewing the working fluid as a two-component fluid: dry air and water.
The structure of the atmosphere, as measured by its temperature and pressure exhibits regularity in space and time, which has fostered a nomenclature of distinct layers (troposphere, stratosphere, mesosphere, thermosphere) based largely
5
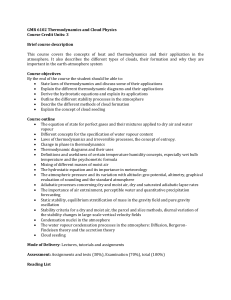
6 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS thermosphere mesosphere stratosphere troposphere mesopause stratopause tropopause
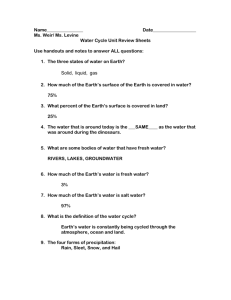
Figure 1.1: Structure of atmosphere as a function of height (plotted on abscissa). From left to right, temperature, pressure, and density. Density of air (solid) and water vapor (dashed) shown normalized by their surface values of 1.191 kg m
− 3 and 0.014 kg m
− 3 respectively.
Data taken from the averaged mid-latitude summer (McClatchey) temperature structure below 60 km. and from the US standard atmosphere above 60 km.
on the thermal structure as shown in Fig. 1.1. A nomenclature based on the degree of ionization of the gases leads to the identification of an ionosphere above
75 km; one based on the atmospheric composition demarcates the atmosphere into a homosphere below roughly 80 km where the composition of dry air is relatively fixed, and a heterosphere above. The subject of dynamic meteorology is almost exclusively concerned with the homosphere, especially its lowest most portion the troposphere, hence our definition of dry air.
Through the depth of the troposphere density and pressure varies by an order of magnitude, and temperature varies almost 100
◦
C, from well below to well above freezing. From Fig. 1.1 it is evident that the density and pressure of that atmosphere fall off almost exponentially with height, hence permitting a description in the form f ( z ) = e
− z/λ
(1.1) where f can be pressure or density, z is height above the surface and λ is a scale height. For the profiles in Fig. 1.1
λ = 8 .
8 , 7 .
5 and 1.4 km respectively for pressure, density and water vapor density. Thus while pressure and density are commensurate with the scale of the troposphere the water-vapor scale-height is much smaller. Although not shown the temperature structure of the troposphere also varies greatly at the surface with maximum temperatures approaching 50
◦
C and minima of -50
◦
C. Similarly water vapor amounts vary from a trace to as much as
40 gkg
− 1 over warm tropical oceans.
For the purposes of dynamic oceanography the ocean is best thought of as an ideal solution of various ions (e.g., chlorine , sodium, magnesium, sulfur, calcium and potassium) in water. Together they comprise what we call sea-salt whose concentration by mass is called the salinity. The salinity, s of water is approximately
1.1. STRUCTURE
1000
0
Temperature [deg C]
5 10 thermocline
15 upper ocean
35
Salinity [PSU] halocline
36 surface mixed layer
7
4000
5000
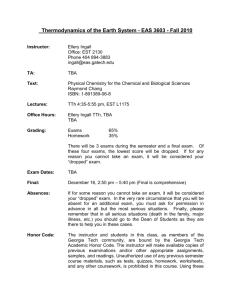
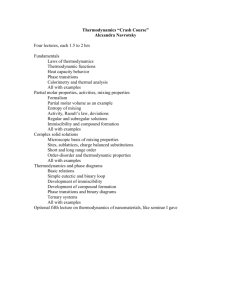
Figure 1.2: Structure of the ocean, showing temperature and salinity versus depth. Here the data is taken from Levitus 98 for a point in the north Atlantic (40N, 50W) in the winter season
3.5%, or 35 h , where the practical salinity unit or PSU is often used instead of per mil. Treating the various salts as one composite quantity is only useful because their proportions are relatively fixed with respect to one another (55.4% Chlorine,
30.8% Sodium, 3.7% Magnesium, 2.6% Sulfur, 1.2% Calcium and 1.1% Potassium). Like the atmosphere the ocean contains a variety of other constituents which regulate its properties. These range from biological matter which regulates its radiative properties, to other chemical constituents (including carbon dioxide) which when cycled among the land and atmosphere help determine the state of the climate system. In summary, the ocean, like the atmosphere is best idealized as a two component system, but unlike the atmosphere its important minor constituent
(while variable, but in both cases less than 4% by mass) does not undergo changes in phase—although its major constituent does.
The structure of the ocean also exhibits regularity with well defined layers apparent in both the temperature and salinity (Fig. 1.2). The upper 10-200m of the ocean is usually associated with a surface mixed layer (shaded in the figure) in which temperature and salinity are relatively uniform. Below this layer both T and s change markedly through layers called the thermo and halocline respectively.
The abyssal, or deep, ocean (which typically resides below 1km and contains most of the ocean mass) tends to have a more uniform temperature and salinity structure.
The pressure of the ocean varies by four orders of magnitude, between surface pressures near 10 5
Pa to pressures near 4 × 10 7
Pa at its average depth
1
At the location shown in Fig. 1.2 temperatures range from 17
◦ of about 3800m.
C to near zero, although in select locations temperatures over 30
◦
C are not uncommon. Salinity in
1
The deepest point in the ocean is thought to be near 11 km and located in the Marianas Trench, the bottom pressure at this location would be around 1 .
1 × 10 8 Pa
8 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS turn varies much less. The most saline waters approach 37 PSU in the subtropical
Atlantic, falling to less than 34 PSU at extreme latitudes in the Pacific. As is the case for the atmosphere, most of the variability is evident near the surface.
1.1.1
Systems & States
Quantities like pressure, density, and temperature are thermodynamic quantities.
In using these quantities to describe the atmosphere and ocean we are attempting a thermodynamic description of the system. What do we mean by this? The idea is that the state of the system does not need to be specified in terms of the location and momenta of each of its atoms, but that it can be thought of in terms of locally homogeneous fields of macroscopic quantities, i.e., Temperature, pressure, density, salinity, etc. In some general sense thermodynamics is the study of how relationships among these variables are constrained by two laws of nature: The first and second law of thermodynamics.
More formally, when we speak of a system we have in mind a spatially compact, simply connected, quantity of matter. For our purposes we usually consider homogeneous systems, i.e., the properties of the system are invariant to translations in space. In systems in which gravity plays an important role such translations are often restricted to directions perpendicular to the gravitational acceleration. In the atmo-
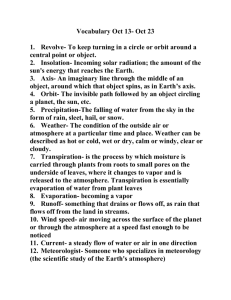
Surroundings
{p,T,V}
System sphere or ocean thermodynamic quantities also vary in space and time; however, in this case we can speak of locally homogeneous systems, i.e., parcels of air or
Figure 1.3: The canonical thermodynamic system.
water whose properties to all extents and purposes can be considered homogeneous. This is an idealization of course, but a useful one.
As illustrated in Fig. 1.3 we can distinguish between open and closed systems on the basis of whether they interact with their surroundings. Closed systems are isolated from their surroundings. Fluid parcels in the atmosphere or ocean are open.
For primarily pedagogical purposes, when developing thermodynamic principles it proves useful to keep in mind the classical expression of a closed thermodynamic system: a piston containing some volume of gas.
All systems are characterized by their state. Any two systems with an identical state are thus considered equivalent. Hence when we refer to the state of the system we are actually referring to some minimal set of measures necessary to uniquely characterize the macroscopic character of the system. These variables are thus called state variables, or thermodynamic coordinates. In our simple system of Fig. 1.3 the pressure, p, Temperature T and volume V are all state variables.
1.1. STRUCTURE 9
Because these variables do not vary independently, but instead are constrained by an equation of state, i.e., f ( p, V, T ) = 0 , (1.2) any two of { p, T, V } are sufficient to uniquely determine the state. In other systems additional state variables might be necessary. For instance in a two component system the mass fraction of the second component is also necessary. In the atmosphere the mass of the primary variable constituent, water vapor, is measured by the specific humidity: q v
≡ m v m
(1.3) where m v denotes the mass of water vapor, while m denotes the mass of the system.
An alternative, and often used analog is the water vapor mixing ratio r v
≡ m v
/m d where m d denotes the mass of dry air, i.e., m d
= m − m v
.
Hence r v
= q v
/q d
.
For sea water the additional constituent is the specific salinity: s ≡ m s m
(1.4) where m s denotes the mass of salts. For more complex systems other quantities might be necessary. In the atmosphere in the presence of condensate one often tracks the mass of different classes of hydrometeors, for instance q l and q i denote the specific liquid and specific ice mass, in which case q t
= q v
+ q c
+ q i is the specific mass of all (or the total) water in the system. Another example would e the study of ionized media where one needs to measure the ionization.
Both q v and s are all examples of intensive variables. In general, intensive variables can be formulated in a variety of ways, depending on how the matter in the system is characterized. Generically an intensive variable is based on the mass measure of matter, as was the case for q v and volume V contains an amount of mass M, s.
For instance, given a system whose
V
α =
M denotes the specific volume of the system. Because it is sometimes convenient to define intensive variables in terms of other measures of the matter in the system intensive variables can be more generally defined; for instance, molar intensive variables refer state variables to a unit mole and are useful when studying the chemistry of the atmosphere and ocean. Hence the origin of the adjective “specific” when describing the humidity and salinity.
Whereas intensive variables are independent of the amount of matter in the system, extensive variables are not. However, every extensive variable can be converted to its corresponding intensive form by normalizing it by the amount of matter it describes. Variables normalized in this fashion are called specific variables,
10 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS hence the name specific volume for α.
For the most part, specific versions of intensive variables are denoted by lower case, the frequent use of α to denote the specific volume V /M (thereby avoiding confusion with the meridional velocity which we denoted by v ) being a notable exception. To be precise, if the normalization is in terms of some measure other than mass it is so noted by an appropriate modifier.
For instance in the example given above one refers to the molar specific volume.
1.1.2
Thermodynamic Processes & Equilibrium
The concept of equilibrium is essential in our subsequent discussions. We speak of a system being in equilibrium if its state is not changing in time. If a system is in equilibrium it can be represented by a point in its state space. That is, if the thermodynamics coordinates of a system describe a space, then the state of a system is characterized by a point in that space.
A thermodynamic process refers to the change in the state of a system — usually this change takes place in time. A reversible thermodynamic process is one in which a system changes its state without departing from equilibrium. Thus a reversible thermodynamic process can be described by a line in the state-space of the system.
Clearly the concept of a reversible thermodynamic processes poses something of a paradox. To constitute a process the system’s state must be changing, yet to remain in equilibrium a system’s state must not change. This process is resolved by a consideration of timescales. If the state of the system is being changed sufficiently slowly relative to the time it takes a system to adjust to a change we can consider a reversible processes as a sequence of infinitesimal changes to the state of a system. Strictly speaking a reversible process defined in this manner should take infinite time; however, the separation between the adjustment time of the thermodynamics systems we consider and the timescale over which their states change is sufficiently large so as to endow the concept of a reversible thermodynamic process with practical utility. In such a situation time itself becomes meaningless.
Equilibrium thermodynamics is atemporal.
1.1.3
Temperature
Temperature and pressure are basic thermodynamic variables which make ready reference to our experiences and are commonplace in our study of the atmosphere.
Pressure has a ready interpretation in terms of ideas from classical mechanics, namely forces and areas. Temperature, although seemingly familiar is more ambiguous. In that it it has no microscopic interpretation, like entropy it is also a more particularly thermodynamic quantity. Temperature can be defined in a pure
1.1. STRUCTURE 11 thermodynamic sense by a consideration of ideal gases, and the efficiency of heat engines. Neither of which make reference to the nature of matter underpinning the thermodynamic system. However, most of us are familiar with models of matter that allow a physical interpretation of temperature, based on a working model of the matter. For instance in the context of the kinetic theory temperature can be associated with the kinetic energy of the molecules constituting the gas according to
3
2 kT =
1
2 mv 2 (1.5) where k = 1 .
38 × 10
− 23
J K
− 1 is Boltzmann’s constant, essentially a porportionality factor which converts one measure of energy (Joules) to another (K). The correspondance between the temperature and the average kinetic energy of the gas molecules expresses its inherently statistical nature. Because kinetic and statistical mechanical descriptions of thermodynamic systems are relatively recent a variety of temperature scales have emerged. Based on the kinetic interpretation, for which negative energies are not permitted, the more physical one is the Kelvin scale, which does not permit negative Temperatures. On the Kelvin scale increments are effectively equal to increments on the Celsius scale. By convention the triple point of water is 273.16 K on the Kelvin scale, because this is 0.01 K above water freezing point (the zero point of the Celcius scale) there exists an offset of
273.15 between the two scales. Because they share a common increment, i.e., 1 K
= 1
◦
C both the Celsius and Kelvin scales are used interchangeably in the study of atmospheric and oceanic phenomena.
1.1.4
Equations of State
The equation of state for an ideal gas, composed of N constituents is given by p = ρRT where R = N a k/m with N a being Avogadro’s number ( 6 .
0251 × 10
26
) and
(1.6) m =
P
N k =1 m
P
N k =1 k n k n k
(1.7) being the mean molecular weight of the gas, with m k and n k measuring the mass and moler concentration of each constituent. This implies that the effective gas constant R for dry air (which we denote R d
) is 287.05 J kg
− 1
K
− 1
.
Allowing for variable vapor concentrations implies an effective atmospheric gas constant which varies with the specific humidity of the atmosphere as
R = R d q d
+ R v q v
(1.8)
12 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS where q d is the specific mass of dry air and R v
= 461 .
5 J kg
− 1 constant for water vapor. In the absence of condensate rewrite (1.8) q d
= 1 − q v
K
− 1 is the gas allowing us to
R = R d
(1 + q v
) (1.9) where
≡
R v
R d
− 1 ≈ 0 .
608 (1.10)
To avoid working with a gas constant which depends on the composition of the fluid
Meteorologists often work in terms of something called the virtual temperature, which absorbs the compositional dependence in R , in the absence of condensate it is given as
T v
= T (1 + q v
) .
(1.11)
In terms of T v
Eq. 1.6 is simply p = ρR d
T v
.
Thus T v can be interpreted as the temperature required of dry air for it to have the same density as moist air at some pressure and temperature.
Equation 1.6 describes how a gas behaves in the limit as the ratio of the intermolecular distance over the mean molecular size becomes infinite. Real gases of course depart from this limit in important ways. For instance the ideal gas law is incapable of predicting phase changes, and thus is a bad approximation for water vapor near saturation. It also fails to describe the relationship among state variables in a liquid. To describe the behavior of gases nearer saturation other equations of state have been proposed. Perhaps the most famous is the van der Waals Equation of state: a p +
α 2
( α − b ) = RT.
(1.12)
Other equations of state include the Clausius equation of state, and the Beattie-
Bridgman equation: p =
RT
α
(1 − ε )( α + B )
α
−
A
α 2
.
(1.13)
Note that both the Beattie-Bridgman and the van der Waals Equations of states reduce to the ideal gas law in the limit when their additional parameters vanish. For the van der Waals equation the constant a accounts for the effect of inter-molecular forces, while the constant b accounts for non-vanishing molecular sizes. Thus for p → 0 we expect that a = b = 0 .
Yet another common equation of state is the Virial Equation which expands the pressure-volume product in a power series in p pα =
X
A n
( T ) p n
.
n =0
(1.14)
1.1. STRUCTURE 13
Here the sum can be carried out to the extent that measurements permit. Note that the coefficients in the summation are functions of temperature, with the first virial coefficient being A
0
= RT.
This equation should make clear the empirical basis of most equations of state. One job of statistical mechanical descriptions of matter would be to predict these relationships.
Although the more complex equations of state are necessary to predict the behavior of vapor near saturation, we are fortunate that for most purposes in the atmospheric sciences the ideal gas law describes the behavior of the atmosphere to a good degree of approximation. The oceanic sciences are not so fortunate, the equation of state used by many ocean models is empirical and very complex. Although even the relatively complex expressions are themselves simplifications of a standard called the UNESCO International Equation of State (or IES 80) which is derived as a complicated curve fit to very precise measurements. An example of one such equation is
ρ = p
2 p + p
1
+ 0 .
7028423( p + p
1
)
(1.15) where p
1
( T, s ) = c
1 , 0
+ c
1 , 1
T + c
1 , 2
T
2 p
2
( T, s ) = c
2 , 0
+ c
2 , 1
T + c
2 , 2
T
2
+ c
1 , 3
T
2
+ d
1 , 1 s
+ d
2 , 1 s + e
2 , 1 sT where T is the temperature in in bars ( 10
5
◦
C, s is the salinity in PSU, and p is the pressure
Pa). The coefficients appearing in the expressions for p
0 and p
1 are provided in Table 1.1. However, even this simplification is far too unwieldy for analytical work.
c
1 , 0 c
1 , 3 d
1 , 1
5884.8170366
c
2 , 0 c
1 , 1
39.803732
c
1 , 2
-0.3191477
c c
2
2
,
,
1
2
0.0004291133
d
2 , 1
2.6126277
e
2 , 1
1747.4508988
11.51588
-0.046331033
-3.85429655
-0.01353985
Table 1.1: Coefficients for the Wright (1997) equation of state for seawater as described in Eq. 1.15
Although only accurate near its reference state, a yet more approximate equation, designed to isolate essential nonlinearities in the more accurate expressions,
14 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS is as follows:
α = α
0
[1 + β t
( T − T
0
) − β s
( s − s
0
) − β p
( p − p
0
)]
+ α
0
γ
∗
( p − p
0
))( T − T
0
) +
β
∗ t
( T − T
0
)
2
2
.
(1.16)
Here β
T denotes the thermal expansion coefficient, β s the salinity contraction coefficient, β p the isothermal compressibility coefficient. Non-linearities are denoted by starred terms, with γ
∗ being called the thermobaric parameter and β
∗
T the second coefficient of thermal expansion. Values of these parameters can be calculated from (1.15) and is left as an exercise, there physical interpretation is discussed in the next section.
1.2
The First Law and its Consequences
To develop a consistent notation and a common basis for further exploration we review the First Law of Thermodynamics here, with an emphasis on its implications for ideal gases.
1.2.1
The First Law
The First Law of Thermodynamics can be stated in a variety of equivalent ways:
• Heat and work are equivalent
• Energy is conserved
• A perpetual motion machine of the first kind is impossible
If we let U denote the internal energy of the system, then the first law states that the difference in internal energy
∆ U = U b
− U a
∆ U = Q − W.
(1.17) between the two equilibrium states b and a is equal to the heat Q (whose specific value is not to be confused with the mass fractions of the various phases of water, e.g., q v
) added to the system plus the work done by the system in going from one state to the next. If we denote by W the work done by the system on its surroundings in moving from a to b the first law can be written as
(1.18)
1.2. THE FIRST LAW AND ITS CONSEQUENCES p
.
a dw dw’
.
b
15
V a
V b
V
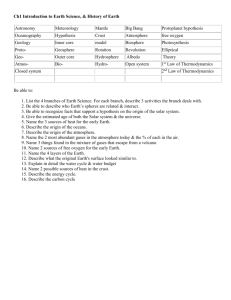
Figure 1.4: Relation between work and path for systems that can be represented on a ( p, V ) diagram.
This relation establishes the equivalence of work and heat. It is best understood in this sense by realizing the historical context in which it was introduced: For a long time work and heat were thought of as physically distinct concepts.
Work is defined as the product of the force F exerted on a mass in the direction of its displacement and this displacement l , i.e.,
W =
Z
F .d
l .
(1.19)
In terms of the system in Fig. 1.3 then the force, F is simply pA the product of the pressure and the upper surface area A of the piston. In this situation, for a small displacement ∆ l of the piston
W = F ∆ l
= pA ∆ l
= p ∆ V.
(1.20)
(1.21)
(1.22)
Consequently the amount of work done W in a small expansion or compression is simply p ∆ V.
This expression for work allows us to write the first law in the form:
∆ U = Q − p ∆ V.
(1.23)
Recall that for a system (such as an ideal gas) whose state can be represented by a ( p, V ) diagram, any reversible transformation can be represented by a line on this diagram. This means that the work done on a system through the course of a reversible transformation depends on the path of the system. For instance in
Fig. 1.4 we identify two paths (or processes) connecting states a and b . Denoting
16 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS the work performed by going along the dashed path by along the solid path by W =
R b a dw we note that W
0
W
0
=
> W.
R b a dw
0 and the work
In a cyclic process a → b → a work ( W < 0) is done on the system for a counter-clockwise loop, while for clockwise loops work is done by the system, in which case W > 0 .
1.2.2
The Calculus
Exact Differentials
The previous discussion highlights an important concept. Work is not a state variable. If work were a state variable we could speak of W a and W b as the work of state a and the work of state b.
Moreover we could think of a differential amount of work dW implied by an infinitesimal change in the state as a unique quantity.
However, because the differential amount of work depends on the processes (or path) we can not do this, which is another way of saying that work is not a state variable. Heat is also not a state variable. While we can speak of the temperature of a system, the pressure of a system, or its specific volume, we can not speak of the heat of a system. Instead we speak about the work done by (or on) the system, or the heating of a system during a change in state, but never the heat or the work of the system.
To discriminate between differentials of state variables and differentials of things like work and heat the concept of an exact (or total) differential is often introduced. A exact differential has the property that its integral over a closed path vanishes. That is dχ is an exact (or total) differential if:
I dχ = 0 .
(1.24)
Thus differentials of state variables are exact differentials. That is they do not depend on the path of integration, consequently for systems in equilibrium the value of a state variable depends only on the systems state. Sometimes a differential change in the system’s state can result in a certain amount of heat absorbed, or work done by the system. In such circumstances there is the tendency to think of this heat, or work, as a differential amount of heat ( dq ), or work ( dw ), which is done, in accord with the differential change in the systems state. This tendency often leads to the mistaken identification of dq and dw with exact differentials. To avoid this confusion we denote small amounts of work done, or heat absorbed, by the system due to a differential change in state by δq and δw respectively. Because of the important role exact differentials play in thermodynamics, namely their correspondence to variables of state, some authors have equated classical thermodynamics with the study of exact differentials.
1.2. THE FIRST LAW AND ITS CONSEQUENCES 17
Although Q and W are not state variables, the internal energy U (or the specific internal energy u ) is. That is we can speak of the internal energy of the system,
H and in a cyclic process ∆ U = dU = 0 .
Thus in a cyclic process the first law implies that Q = W.
The heat flowing into the system is equal to the work done by the system. Thus the first law states that in any number of complete cycles it is not possible for the system to put out more energy in work than it absorbs in heat.
Partial Derivatives
Again, let us restrict ourselves to systems that can be represented on the plane (i.e., by two state variables). In this case we note that all such systems empirically satisfy an equation of state that can be written in the form of (1.2) where f is arbitrary but analytic (which is another way of saying it allows a power series representation) and where p, V, and T are state variables As stated previously this implies that only two of the state variables are independent.
In general for three variables ( x, y, z ) connected by an equation of state we can write x = f
1
( y, z ) , y = f
2
( x, z ) .
(1.25)
This implies that dx =
∂f
1 dy +
∂y
∂f
1 dz, and dy =
∂z
∂f
2 dx +
∂x
∂f
2 dz.
∂z
Substituting for dy from the latter, into the former,
(1.26) dx =
∂f
1
∂y
∂f
2 dz +
∂z
∂f
2 dx +
∂x
∂f
1 dz,
∂z
(1.27) or
1 −
∂f
1
∂f
2
∂y ∂x dx =
∂f
∂y
1
∂f
∂z
2
+
∂f
1
∂z dz.
(1.28)
But since dz and dx are independent the coefficients multiplying them on the left and right hand sides of (1.28) must vanish which implies the following relationships among the partial derivatives:
∂f
∂y
1
=
∂f
2
∂x
− 1 and
∂f
∂y
1
∂f
∂z
2
= −
∂f
1
∂z
.
(1.29) the latter equality can be written as
∂f
1
∂f
2
∂y ∂z
∂f
1
∂z
= − 1 −→
∂x
∂y z
∂y
∂z x
∂z
∂x y
= − 1 .
(1.30)
18 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS where the latter follows from the definitions of f
1
, f
2 and f
3 above. The point being that knowledge of the equation of state (say f
1
) imposes broad constraints on the partial derivatives of the system, e.g., f
2
.
In the case when an equation of state is not available, great insight into the behavior of the system can be obtained simply by knowledge of its partial derivatives, which in most cases can be determined empirically.
If we always chose to describe our system with the same thermodynamics coordinates, then there would be no ambiguity in the partial derivatives. However, because ones choice of coordinates are often suited to particular purposes, the meaning of the partial derivatives can be ambiguous. For instance, if the specific internal energy u is being used to characterize the system, then ∂u/∂p is ambiguous depending on whether u is defined as a function of p and v or as a function of p and T.
To continually remind the reader of the functional dependence the following notation is common
∂u ( p, v ) ∂u
≡ .
(1.31)
∂p ∂p v
The sub-scripted thermodynamic variables help remind the reader what the other independent variable is that is being held constant by more generally indicating exactly what is held constant in a particular process. Often this notation is generalized to any measure of change, i.e., dT p denotes the isobaric change in temperature.
In anticipation of the entropy a subscript η is used to denote isentropic processes, i.e., dT
η refers to an isentropic differential change in temperature.
Two partial derivatives which are readily measured and often used to determine the behavior of a system are the coefficient of thermal expansion coefficient of isothermal compression, β p defined as follows:
β
T and the
α
− 1
α
− 1
∂α
∂T
∂α
∂p p
= β
T
T
= − β p
.
(1.32)
(1.33)
For saline solutions the salinity s should also be held constant in the partial derivatives above. Likewise such solutions permit the definition of another material property, the salinity contraction coefficient, β s
,
α
− 1
∂α
∂s p,T
= − β s
.
(1.34)
For systems, such as ideal gases, with simple closed form equations of state, specifying β
T and β p is trivial. However, in more complicated systems it is often
1.2. THE FIRST LAW AND ITS CONSEQUENCES 19 useful to be able to characterize the system in terms of empirically determined coefficients, as for instance was the case for seawater (cf., Eq. 1.16).
Another important property of a substance is its heat capacity, or specific heat capacity. Consider adding a measurable amount of heat ∆ Q to our system of
Fig. 1.3. If, after equilibration, we find that its temperature has increased by an amount ∆ T we can linearly relate the heat added to the temperature change,
C =
∆ Q
.
∆ T
(1.35)
However because ∆ Q is not a state function, it can not be written as a function of other state variables, which means that lim
∆ Q → 0
∆ Q
∆ T
(1.36) does not exist. Because the heat added depends on the path, the value of this limit depends on the process. That is there are an infinite number of heat capacities, each corresponding to a different process. Because the limit is only defined for specified processes, it is only meaningful to speak of the heat capacity with respect to one or the other process. The heat capacities corresponding to two common processes are thus commonly introduced, C p and C v being the isobaric and isometric (constant volume) heat capacity respectively; their specific counterparts are denoted c p and c v
.
Given that we denote the specific volume by α we should in principal denote c v as c
α however the use of c v is by now so universally adopted that we tolerate this notational inconsistency in our subsequent development. As we shall see in the next section, given c v and ( β p
, β
T
) , c p can be calculated directly (as can specific heats associated with other processes for that matter).
Just as one task of deeper theories of thermodynamics, i.e., the kinetic theory or statistical mechanics, is to predict the equation of state of a system, (and hence the β s) given a model of the microscopic structure of the system, one would like these theories to also predict the values of the specific heats. The kinetic theory was moderately successful at this. By assuming that energy is partitioned equally among all the degrees of freedom of a molecule it can be shown that for an ideal gas c v
= d
R,
2
(1.37) where d is the degrees of freedom. For a monatomic gas d = 3 corresponds to the three components of velocity, while for a diatomic gas d = 7 accounts for two additional rotational and two vibrational modes of motion.
2
This would predict
2
In principle there should be eight degrees of freedom, but for the idealization of point masses rotation about the common axis of a diatomic molecule is meaningless
20 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS that c v
=
7
2
R.
By experience we know that for diatomic gases c v
≈
5
2
R is a better model. This crisis can only be resolved by quantum mechanics which shows that the vibrational modes are not accessible until diatomic gases (such as O
2 and N
2
) reach much higher temperatures than those found in the lower atmosphere. This also explains why at very low temperatures (where the quantized rotational modes are not accessible) c v
≈ 3
2
R.
1.2.3
Some Consequences of the First Law
Specific Heats
Here we show how the first law can be used to interpret the specific heats discussed in the previous section, and to derive relationships among specific heats corresponding to different processes. In particular the first law allows a ready interpretation of c v in terms of the specific internal energy, u . Choosing α and T as thermodynamic coordinates and noting that u is a function of state implies that one can write u ( α, T ) which implies that du =
∂u
∂α
T dα +
∂u
∂T
α dT.
Using this form of du in the expression for the first law yields
(1.38)
δq =
∂u
∂T
α dT + p +
∂u
∂α
T dα, (1.39) where here we denote the amount of heat added through these differential changes in the working fluids state by δq.
From (1.39) we see that for any isometric process the second term vanishes so that the isometric specific heat capacity is readily interpreted in terms of the internal energy: c v
≡
∂u
∂T
α
.
(1.40)
From a kinetic theory point of view u = ( d/ 2) RT hence (1.37) follows naturally from this definition. This interpretation in terms of the microscopic state should make clear that the effective value of c v for a composite system should be given as a mass weighted sum of the individual components, i.e., c v
= q d c v,d
+ q v c v,v where c v,d is the isometric specific heat of dry air, and c v,v is its counter part for water vapor. Eq. (1.40) also allows us to write the first law as
δq = c v dT + p +
∂u
∂α
T dα.
(1.41)
1.2. THE FIRST LAW AND ITS CONSEQUENCES 21
Equation (1.41) can be used to relate c p to c v in terms of other properties of the system. For instance, given an isobaric process δq = c p dT | p
(by definition), substituting for δq above yields c p dT p
= c v dT p
+ p +
∂u
∂α
T dα p which upon rearrangement and use of the definition of β
T yields
(1.42) c p
= c v
+ p +
∂u
∂α
T
β
T
α = ⇒
∂u
∂α
T
= c p
− c v
β
T
α
− p (1.43) which yields an expression of the first law in terms of well known material properties c p
− c v
δq = c v dT + dα.
(1.44)
β
T
α
For an ideal gas β
T
α = R/p so that c p
= c v
+ R and the expression for the first law takes a somewhat more familiar form:
(1.45)
δq = c p dT − αdp.
(1.46)
Enthalpy
An additional state function, which has some correspondence with the internal energy, is the enthalpy h : h = u + pα = ⇒ dh = du + d ( pα ) .
The first law can be expressed in terms of h as follows:
δq = du + pdα = du + d ( pα ) − αdp = ⇒ dh = δq + αdp.
(1.47)
(1.48)
This implies that the change of enthalpy is equal to the heat added to the system in an isobaric process, hence h is sometimes called the heat function. Its introduction obviates the need to use the word “heat” as a noun and can be though of in that sense, i.e., as the heat function. Furthermore, because δq = c p dT p c p
=
∂h
∂T p
, (1.49)
22 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS which further illustrates that the enthalpy is the isobaric equivalent to the isometric internal energy. For moist air in the absence of condensate ( m d
+ m v
) h = m d h d
+ m v h v
.
From (1.49) we can calculate the effective heat capacity of the moist system as c p
= q d
∂h d
∂T p
+ q v
∂h
∂T v p
(1.50)
= q d c p,d
+ q v c p,v
(1.51) where c p,v is the isobaric specific heat of water vapor and c p,d specific heat for dry air. This expression for c p is the corresponding is in correspondence with our expectation based on our experiences with R and c v
.
Further explorations of h and c p will be conducted after the introduction of entropy below.
Adiabatic Processes
A matter of considerable interest in the atmosphere is how state variables change in processes that do not involve an exchange of heat with the surroundings. These are called adiabatic processes. Here we consider the behavior of an adiabatic transformation of a single component ideal gas, i.e., dry air. Starting from the adiabatic form of the first law for an ideal gas, and substituting for α from the equation of state yields the following expression for the first law: c p dT −
RT dp = 0 p
= ⇒ d ( T p
− R/c p ) = 0 , or T p
− R/c p
(1.52)
= constant .
(1.53)
Note, that these define curves on a ( p, T ) diagram, which can be compared to isotherms and isobars on a similar diagram. These curves are called adiabats, or in anticipation of entropy, isentropes.
These relations help define what is called potential temperature and denoted by
θ.
Instead of describing the state of a parcel by its temperature, which varies in a predictable way with pressure, the potential temperature allows us to characterize the thermal state of a parcel in a way that does not depend on its current pressure.
Physically this is because θ is defined to be that temperature a parcel would have if adiabatically brought to some reference pressure, p
0
.
Clearly adiabatic displacements of a parcel will change its temperature, but not this potential (or reference) temperature. An expression for θ can be derived from (1.53) by noting that if a parcel at some initial temperature T is brought adiabatically from its current pressure p to a reference pressure p
0 its new temperature is given as
θ = T p p
0
R/c p
.
(1.54)
1.2. THE FIRST LAW AND ITS CONSEQUENCES 23
It is straightforward to show (and we do so subsequently) that (1.54) can be readily generalized to a multi-component fluid, simply by replacing R and c p by their effective values. Its generalization to a fluid which permits adiabatic changes in phase of one of its components will also be dealt with later.
Similarly, and of practical use in oceanography is the concept of a potential density, ρ
θ
. Like θ, ρ
θ seawater we write is the density at a reference state. For instance, if for
ρ = ρ ( s, T, p ) then
ρ
θ
≡ ρ ( s, θ ; p
0
) .
For dry air this implies that ρ
θ
= p
0
/ ( R d
θ ) , which because p
0 and R d are fixed is simply proportional to the inverse of θ.
In the oceans ρ
θ also accounts for the effect of salinity on density and thus is a better measure of the static stability (which depends on density differences) of a water column than simply the density. Because the density varies so little in the ocean often a perturbation density, defined as
σ
θ
= ρ
θ
− 1000 (1.55) is used. Unlike in the atmosphere, where 1000 hPa is almost unanimously adopted for the the reference pressure, p
0
, different reference pressures may be used in the definition of ρ
θ and hence σ
θ
.
To indicate this the symbol σ n is used in lieu of
σ
θ where n denotes the reference pressure in hbars. For instance, σ
2 denotes the deviation potential density defined with respect to a reference pressure of 200 bars
(roughly corresponding to a depth of 2km).
For the same reasons that the concept of potential density proves useful for describing the ocean one might think that it would be similarly adopted by meteorologists when describing moist, but unsaturated flows, for which the specific humidity affects the density. However, to capture this effect atmospheric scientists traditionally work in terms of the virtual potential temperature
θ v
R
≡ θ
R d
= θ (1 + q v
) (1.56) where is related to the ratio of the gas constants for dry air and water vapor and was defined in Eq. 1.10. Clearly θ v is an analog to T v defined in Eq. 1.11. Because
ρ
θ
= p
0
Rθ
= p
0
R d
θ v
(1.57)
ρ
θ is proportional to the reciprocal of θ v
.
Thus working in terms of θ v captures the advantages of ρ
θ
.
Physically it can be thought of as the temperature dry air would need to have to have the same density as moist air at a reference pressure p
0
.
24 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS
1.3
The Second Law and its Consequences
A−B B−C C−D D−A p
A
B T
2
D
C
T
1
T
2
T
1 insulator insulator v
Figure 1.5: A piston taken through a Carnot Cycle. The cycle is shown on the
( p, α ) plane on the left.
1.3.1
Carnot Cycles
Consider a fluid whose state can be represented on a ( p, α ) diagram. Then a cycle that is composed of two isothermal and two adiabatic legs is called a Carnot Cycle.
Fig. 1.5 illustrates the basic Carnot Cycle in terms of a diagram on the ( p, α ) plane and in terms of a piston and some temperature reservoirs. The cycle has four steps:
1. In going from A to B the system does work and absorbs heat a fixed temperature T
2
2. In going from B to C the system does work and cools adiabatically to a temperature T
1
< T
2
.
By the first law this work must come at the expense of the systems internal energy.
3. Along segment C to D work is done on the system and heat is removed from it at fixed a temperature T
1
.
4. The final segment form D to A completes the cycle. Here work is again done on the system and this work goes into the internal energy of the system as it warms from T
1 back to T
2
.
The Cycle we have described is called a Carnot Cycle, or Heat, Engine. In the direction we have described it work is done by the system:
W = Q
1
+ Q
2
.
(1.58)
1.3. THE SECOND LAW AND ITS CONSEQUENCES 25
Here Q
2 and Q
1 denote the amount of heat added and expelled from the system respectively. In order for the work to have the right sign Q
1
< 0 and Q
2
> 0 .
The efficiency of the heat engine, χ is defined as the fraction of heat added to the system which is used to do work, i.e., χ = W/Q
2
.
This implies that
χ =
Q
1
+ Q
2
Q
2
(1.59)
Nothing we have said prevents us from considering the cycle in reverse. In this case work is done on the system. A quantity of heat | Q
1
| is added to the system at a temperature T
1 and a greater quantity of heat | Q
2
| is extracted from the system at a temperature T
2
.
A cycle operating in this fashion is called a Carnot Refrigerator.
1.3.2
The Second Law
Kelvin’s postulate of the second law is:
A transformation whose only final result is to transform into work, heat extracted from a source which is at the same temperature throughout, is impossible.
While Clausius postulates that:
A transformation whose only final result is to transfer heat from a body at a given temperature to a body at a higher temperature is impossible.
Q
Q
2
2
T
2
Q
2
T
1
Q
1
W
Figure 1.6: Let the dashed lines enclose the system.
It turns out that these statements are equivalent expressions of what has come to be called the 2nd law of thermodynamics. This can be shown by noting that the negation of one implies the negation of the other. Suppose Clausius’ statement were false, then we could transfer Q
2 units of thermal energy (heat) from a reservoir at temperature T
1 to a reservoir at some higher temperature T
2
.
This heat could
26 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS be used to do work via a Carnot Cycle. Since the warm reservoir (at T
2
) would remain unchanged this would lead to a situation in violation of Kelvin’s statement.
This is illustrated schematically in Fig. 1.6 which shows that assuming Clausius’ postulate is false allows one to couple two cycles whose only function it to extract heat from a reservoir at temperature T
1 to do work W.
Kelvin’s statement of the second law can also be read: “a perpetual motion machine of the second kind is impossible.”
Efficiencies of Heat Engines:
• No heat engine operating in cycles between two reservoirs at constant temperature can have a greater efficiency than a reversible engine operating between the same two reservoirs.
• All reversible engines operating between two reservoirs at constant temperatures have the same efficiency.
These follow because in both cases if the less efficient engine is reversible it could be driven by the more efficient engine operating as a refrigerator. This would results in a situation that violates Clausius’s statement of the second law.
Absolute Temperature Scales:
The efficiency of heat engines can be used to define a new temperature scale. This temperature scale has the property that: f ( T
1
)
= f ( T
2
)
Q
1
.
Q
2
(1.60)
Kelvin suggested that a temperature scale be defined such that f ( T ) = T, so that
T
1
/T
2
= Q
1
/Q
2
.
This defines an absolute temperature scale which is independent of the working fluid. Sometimes it is called an absolute thermodynamic temperature scale. It turns out that such a scale is compatible with the temperature scale defined by the ideal gas thermometers discussed in Chapter 1.
1.3.3
The Clausius Inequality
Consider a cycle composed of a sequences of N processes that exchange heat with a reservoir. Using i to index the processes we denote by Q i the heat exchanged with the ith reservoir at temperature T i
.
Note that because the work done by a system is defined to be positive the first law dictates that the heat added to a system must also be positive. Given this arbitrary cycle we can superimpose n Carnot cycles on the
1.3. THE SECOND LAW AND ITS CONSEQUENCES 27
W
1
T
1
Q ’
1
Q
0,1
W
2
T
2
Q ’
2
Q
0,2
W
3
T
3
Q ’
3
Q
0,3
T
0
W
M
T
Q
M
’
M
Q
0,M
T
M+1
W
M+1
Q ’
M+1
Q
0,M+1
Figure 1.7: system to form a complex system in which each subsystem consisting of a Carnot cycle exchanges heat between a reservoir at temperature T
0 and T i as sketched in
Fig. 1.7. Hereafter, once cycle of the complex system consists of one cycle each of the N Carnot cycles, and one cycle of the original system.
From the property of the absolute thermodynamic temperature, for each of the
N superimposed Carnot cycles we can write
Q
0 ,i
=
T
0
T i
Q i
.
(1.61)
Denoting the net amount of heat surrendered by the reference reservoir by Q
0 such that:
Q
0
=
N
X
Q
0 ,i
= T
0
N
X
Q
T i i
(1.62) i =1 i =1 we find that
N
X
Q i
T i i =1
≤ 0 .
(1.63)
This is Clausius’ inequality. Because the work performed in a cyclic system (which in this case is the work performed by the original system and each of the N Carnot cycles) is equal to the heat received (see the first law) the second law demands that
Q
0
≤ 0 .
If this were not the case then the only final result of our system would be to extract heat from a reservoir at some temperature T
0 to do work.
If our cycle were to operate in the reverse direction (which is only possible for reversible cycles) all the Q i would change sign, which would imply that
P
N i =1
( Q i
/T i
) ≥ 0 .
The only way this result can be reconciled with the previous result is if the equality sign holds for reversible cycles. This is shown schematically in Fig. 1.8 where an arbitrary cyclic cycle is broken down into N M
Carnot cycles. Clearly the net work, and thus net heat added to the original system, is exactly canceled by that taken up in the N Carnot cycles.
28 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS
C
1
C
2 C
3 p
T
0
C
M+1
C
M v
Figure 1.8: Decomposition of an arbitrary cycle into a sequence of Carnot cycles.
1.3.4
Entropy
For a reversible process, in the limit as N → ∞ the, the summation can be represented as integration, which because it equals zero over the cycle, implies the existence of a perfect differential dη = lim
N →∞ q i
/T i
, i.e.,
I dη = 0 .
(1.64)
This variable, η, is called the specific entropy. Traditionally the entropy is denoted by s but we use η to avoid confusion with the specific salinity. For reversible transformations
Z
A
η ( A ) = dη, (1.65)
O where O is a fixed standard reference state, from which it follows that
η ( B ) − η ( A ) =
Z
B
A
δq
.
T
(1.66)
Allowing for irreversible transformations implies that
η ( B ) − η ( A ) ≥ i
B
X i = i
A q i
T i
.
(1.67)
This latter relation follows directly from (1.64) whereby we note that any irreversible transformation can have a reversible transformation superimposed on it so
1.3. THE SECOND LAW AND ITS CONSEQUENCES 29 as to bring the system back to the original state, thereby defining a cycle:
0 ≥
X
T i i q i cyclic
= i
B
X q i i = i
A
T i irrev
+
Z
A
B dη i
B
X q i i = i
A
T i irrev
+ η ( A ) − η ( B ) .
(1.68)
(1.69)
Rearranging yields (1.67). We have represented a general process as a summation of small steps, only writing reversible process (for which a path is clear) as integrals.
For a completely isolated system q = 0 and hence η ( B ) ≥ η ( A ) where we interpret B as succeeding A.
Thus for isolated systems the only states accessible are those for which the entropy is non-decreasing.
The introduction of the specific entropy η allows us to reformulate the first law as follows:
T dη ≥ q = du + − pdα (1.70) where the equality holds for reverisible processes. Turned around this implies that the work a system can do is bounded, both by its entropy and by its internal energy, according to w ≤ T dη − du.
(1.71)
1.3.5
Some Consequences of the Second Law
Potential Temperature
It proves useful to reconsider our concept of potential temperature from the perspective of entropy. For a moist system in the absence of condensate (i.e., water in vapor phase only) mT dη ≥ m d c vd dT + m v c vv dT + pdV.
Given pdV = d ( p d
V + eV ) − V dp = ( m d
R d
+ m v
R v
) dT − V dp, where e = p v the vapor pressures, (1.72) can be expressed intensively as dη ≥ c p d ln T − pα
T d ln p = c p d ln T − Rd ln p,
(1.72)
(1.73)
(1.74)
30 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS which is identical to the first law for a dry, single component system, except that now R = q d
R d fluid parcel.
+ q v
R v and c p
= q d c p,d
+ q v c p,v depend on the composition of the
Integrating dη along an isentrope connecting a reference state s
0
( T
0
, p
0
) to the given state yields the moist entropy of the given state as
η = η
0
+ c p
T ln
T
0
− R ln p p
0
.
However, for an isentropic process η = η
0 hence
(1.75)
T
0
( s, p
0
) = T p
0 p
R/c p
.
(1.76)
T
0 is the temperature a system in a given state would have if it were brought isentropically to some reference pressure. By standardizing the reference pressure to
1000 hPa we can define a function, θ ( s ) that is only a function of the given state.
This function is just the potential temperature. For the moist fluid:
θ ( s ) ≡ T
0
( s, p
0
) = T p
0 p
R/c p
; (1.77) it represents the temperature the system would obtain if transformed isentropically to the specified state. For a given value of q v it defines a line in the state-space of the system. For a dry atmosphere R = R d and c = c pd in which case (1.77) reduces to the familiar form for the potential temperature given by (1.54).
Free Energies
In analogy to a purely mechanical system, wherein the external work which can be performed during a transformation is bounded by the energy in the system
W ≤ − ∆ U (1.78) the concept of free energies is often introduced to bound the amount of work that can be done during isothermal transformations in thermodynamic systems. Free energies, sometimes called thermodynamic potentials, are particular to thermodynamic systems wherein not all of the energy is available to do work.
In an isothermal transformation the amount of heat added is bounded by the entropy difference between the final and starting states: q =
Z
B
∆ q
0
A
≤ T [ η ( B ) − η ( A )] .
(1.79)
1.3. THE SECOND LAW AND ITS CONSEQUENCES 31
Substituting for Q in (1.18) from (1.79) above places a bound on the amount of work a system can do isothermally: w ≤ − ∆ u + T [ η ( B ) − η ( A )] .
(1.80)
From this we note that the function F = U − T S yields the desired analogy to
1.78, i.e., for isothermal transformations w ≤ − ∆ f.
(1.81)
That is f the free energy, or more precisely the Helmholtz free energy, bounds the amount of work the system can do in an isothermal transformation.
The Helmholtz free energy is also called the isometric or isochoric thermodynamic potential. This is because in an isometric (or isochoric) transformation w ≡ 0 = ⇒ 0 ≤ − ∆ f.
(1.82)
In other words f ( B ) ≤ f ( A ) .
Thus stable configurations of a dynamically isolated system in contact with a heat reservoir at some fixed temperature must be in a state of stable equilibrium when f is a minimum. That is an isolated system can not access any other state since doing so would imply f ( B ) > f ( A ) .
Thus the concept of a thermodynamic potential is developed in analogy to a system’s potential energy which is a minimum for mechanical systems in stable equilibrium.
Analogously we can introduce the concept of a thermodynamic potential for isobaric (rather than isochoric) isothermal transformations. In such processes
` = p [ α ( B ) − α ( A )] = 0 = ⇒ p ∆ α ≤ − ∆ f, (1.83) or
0 ≤ − ∆ f − p ∆ α.
(1.84)
Defining g = f + pα = U − T η + pα implies that for isothermal, isobaric, processes g ( B ) ≤ g ( A ) .
(1.85) g is called the specific Gibbs function, or isobaric thermodynamic potential. For a system in stable equilibrium (at constant pressure in contact with a heat reservoir at temperature T ) it must, in analogy to f , be a minimum.
Thermodynamic potentials have many uses, particularly in the study of chemical reactions and phase changes. Only limited use of them will be made in the remainder of these notes.
32 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS
Relations among partial derivatives
Here we again explore some implications of the entropy for systems whose equilibria can be displayed in the ( p, α ) plane. Choosing α and T as our thermodynamic coordinates
∂u ∂u du = dT + dα (1.86)
∂T
α
∂α
T the expression of the first law in (1.70) allows us to write dη =
1
T
∂u
∂T
α
1 dT +
T
However because η is also a function of state
∂u
∂α
T
+ p dα.
(1.87) dη =
∂η
∂T
α dT +
∂η
∂α
T dα, (1.88) from which it follows that
∂η
∂T
∂η
∂α
α
1
=
T
T
1
=
T
∂u
∂T
∂u
∂α
α
T
+ p .
(1.89)
(1.90)
Taking the partial of the former with respect to α and the partial of the latter with respect to T and equating implies that
∂u
∂α
T
= T
∂p
∂T
α
− p = T
β
T
β p
− p.
(1.91)
Note that for an ideal gas T ( ∂p/∂T )
α
= p in which case the RHS vanishes.
Consequently the internal energy for an ideal gas is a function of T only. For a non-ideal gas (1.91) relates ( ∂u/∂α ) |
T system, i.e., β
T and β p
.
to the measured material properties of the
Maxwell Relations
Given the definition of the free energies the first law can be written in a variety of forms, for instance:
T dη = du + pdα
T dη = dh − αdp
− ηdT = df + pdα
− ηdT = dg − αdp
(1.92)
(1.93)
(1.94)
(1.95)
1.4. PHASE CHANGES 33
If we consider the first of these, and specify ( η, α ) to be the thermodynamic coordinates, the first law can be written as:
T dη =
∂u
∂η
α dη +
∂u
∂η
Because η and α are independent this implies that
α
+ p dα.
(1.96)
∂u
∂η
α
= T and
∂u
∂α
η
= − p.
Because
∂
2 u
∂α∂η
∂
2 u
=
∂α∂η cross differentiation of the partial derivatives in (1.97) implies that
(1.97)
(1.98)
∂T
∂α
η
= −
∂p
∂η
α
.
(1.99)
In addition to providing an interesting definition of temperature and pressure this exercise provides useful relations among the partial derivatives of various state functions. These relations are known as Maxwells’ relations. Three more such relations can be derived by following a similar procedure for the other forms of the first law:
∂T
∂p
∂η
∂α
∂η
∂p
η
T
T
∂α
=
∂η p
∂p
=
= −
∂T
∂α
α
∂T p
(1.100)
(1.101)
(1.102)
1.4
Phase Changes
Imagine a cylinder containing a single constituent gas in thermal equilibrium with a heat reservoir, similar to Fig. 1.3. Now imagine measuring the specific volume of the cylinder at different values of the specified pressure. At high temperatures we would measure isotherms that look similar to those shown in Fig. 1.9. The extent to which we get straight lines in the p, α
− 1 plane reflecting the degree to which our gas behaves ideally.
34 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS p p
T a
T
1
T
2 v
T d
T b
T c v
Figure 1.9: Left Panel: cartoon illustrating ideal gas like behavior in a system where T
2
> T
1
.
Right Panel: behavior of a real, or van der Waals gas in the vicinity of a phase change.
As we repeat this experiment at increasingly low temperatures we notice departures from an ideal gas, and eventually something strange happens. The departures from an ideal gas become more pronounced, and then even discontinuous.
That is the smallest change in p leads to a discontinuous change in α.
This is illustrated in Fig. 1.9 where we show a sequence of isotherms at decreasing temperature
T d
< T c
< T b
< T a
.
If we focus for the moment on the T d isotherm we notice that at small pressures (starting to the right in the right panel of Fig. 1.9) the volume decreases with increasing pressure about like we would expect. But at some point the cylinder contracts more markedly. Thereafter further changes in pressure have a remarkably small change on the volume. Our working fluid behaves quite differently from an ideal gas. If we looked inside the cylinder we might further notice differences in the appearance of the fluid. This change in the working fluid is called a phase change. It comes about because at some critical value of the state parameters the substance spontaneously reorganizes itself into what is called a new state.
Typically we think of three states of matter — but there are actually very many states, or patterns of organization, and not all substances behave similarly. H
2
O is known to have at least VII different solid states while He exists in two liquid sates. Because different states correspond to different forms of organization of the molecular structure of the substance, only one gas state can exist if we associate the concept of a gas with disorder.
For substances which have an equation of state of the form f ( p, α, T ) = 0 the state of the system can be represented by a surface in ( p, α, T ) space. Fig. 1.10
shows the projection of this surface on the ( p, T ) plane for a substance like water that expands on freezing. Here we find ideal gas like behavior at large temperatures, and low pressures. At higher pressures or lower temperatures molecular forces and the shapes and sizes of the molecules become important and the sub-
1.4. PHASE CHANGES 35
p
Critical Point
gas
p
c liquid solid vapor
T
c
T
Triple Point
Figure 1.10: Cartoon depicting lines of equilibria between phases.
stance aggregates into different states. The fact that states other than the gaseous state depend on the molecular properties of the the working matter makes a general treatment of liquids and solids very difficult.
Some interesting aspects of Fig. 1.10 include:
1. A vapor is a gas that is capable of condensing isothermally.
2. The critical point demarcates the isotherm bounding gases from vapors. At temperatures above the triple point no separation into two phases of different densities occurs in isothermal compression from large volumes.
3. The transition from a liquid to a solid corresponds to an increase in α .
1.4.1
Clausius Clapeyron
Note that the boundaries between phases on Fig. 1.10 appear as lines. This is a consequence of Gibbs’ Phase Rule, whereby equilibria between two phases imposes a constraint on the system that eliminates a degree of freedom. Because equilibrium between three phases puts two constraints on a system the triple point is independent of both temperature and pressure.
Because such profound changes occur across phase boundaries it is interesting to derive equations for them. The Clausius-Clapeyron Equation is just such an equation. Most commonly it is applied to the line separating the liquid from the vapor phase, and this is the situation we shall consider here.
36 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS
It can be derived by a consideration of the state of the system in the ( p, α ) plane as shown in Fig. 1.9. Again we focus on the T d isotherm in under the dashed curve.
Here α is multi-valued reflecting the fact that our system consists of liquid and vapor in equilibrium. Liquid has values of α on the left side of the line and vapor has values of α on the right side of the line. Values of α in between correspond to our system being comprised of different relative proportions of liquid and vapor.
For a system in this multi-phase state the total mass of the system is the sum of the masses in each phase, m = m l
+ m v
.
Consequently the internal energy of the system is the sum of the internal energies of the components, similarly for the volume:
U = m l u l
( T d
) + m v u v
( T d
)
V = m l
α l
( T d
) + m v
α v
( T d
) .
(1.103)
(1.104)
Consider a small change in the volume such that we have m l
− δm grams of liquid remaining and m v
+ δm grams of vapor remaining, i.e., a transition from left to right along the horizontal portion of the T d isotherm. The resultant change in U,
δU = [ u v
( T d
) − u l
( T d
)] δm (1.105) implies an exchange of heat with the heat reservoir according to the first law:
= ⇒
δQ = δm ( u v
( T d
) − u l
( T d
) + e [ α v
( T d
) − α l
( T d
)])
δQ
= u v
( T d
) − u l
( T d
) + e [ α v
( T d
) − α l
( T d
)] .
δm
(1.106)
(1.107) where we follow meteorological convention and denote the vapor pressure by e instead of p.
This specific heat is called the latent heat (actually enthalphy) of vaporization.
In the classical thermodynamics it is an empirical property of the substance that may depend on temperature. The ratio ( δQ/δm ) measured in such transformations is denoted by L (or in our case L v to specify its particularness to the vapor liquid transformation). Thus we can write
L v
= u v
( T d
) − u l
( T d
) + e [ α v
( T d
) − α l
( T d
)] .
(1.108) or du dα
=
L
α v
( T d
) − α l
( T d
)
− e .
(1.109)
With the aid of (1.91) can solve directly for the change in the equilibrium vapor pressure e = e s
( T ) at saturation as a function of temperature: de s dT
=
T ( α v
L
− α l
)
.
(1.110)
1.4. PHASE CHANGES 37
This is the Clausius Clapeyron Equation. The partial derivative has been replaced by a total derivative because in this case e s corresponds to the saturation pressure, which does not depend on α.
It tells us how the saturation pressure changes with temperature, i.e, it describes the spacings of the isobaric isotherms under the dashed curve in Fig. 1.9. For the common place case whereby α v
α l we have: de s dT
L
=
T α v
≈
L
T ( RT /e s
)
(1.111) or
1 e s de dT s
=
L
RT 2
= ⇒ e s
( T ) = e s
( T
0
) e
−
L
R
“
1
T
−
1
T
0
”
.
(1.112)
A more accurate expression, which accounts for the manner in which the enthalpy of vaporization L v depends on temperature, is e s
( T ) =
8
X c i
T i
, i =0 with the constants tabulated in Table 1.2
(1.113) c
0
0.611213476e+03 c
4
0.196237241e-05 c
1 c
2
0.444007856e+02 c
0.143064234e+01 c
5
6
0.892344772e-08
-0.373208410e-10 c
3
0.264461437e-01 c
7
0.209339997e-13 c
4
0.305930558e-03
Table 1.2: Coefficients for the Flatau et al., expression for saturation vapor pressure
1.4.2
Condensate
Phase changes in the atmosphere lead to the suspension (and sometimes precipitation) of liquid or solid water whose specific masses are measured by q l respectively. Hence q t
= q v
+ q l
+ q i recalling that q t and q is the specific mass of the i total water, and q v is the specific humidity. If we continue to restrict ourselves to an equilibrium description, where the partitioning of the water mass among its phases is determined by the Clausius-Clapeyron equation, and neglect processes such as the surface tension across droplets or charge accumulation on condensate then the state of our system can continue to be described by three state variables, i.e., q t
, T, p.
The volume of this system may be written in terms of the specific volumes of its individual components:
V = m v
α v
+ m l
α l
+ m i
α i
, (1.114)
38 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS which follows from the assumption of an ideal mixture of ideal gases, i.e., both gases access the same volume so that the volume of the gas phases, V g
= m v
α v
= m d
α d
, can be given by either. Dividing by the total mass of the system leads to an expression for the specific volume:
α = q v
α v
+ q l
α l
+ q i
α i
≈ q v
α v
(1.115)
(1.116)
The approximation follows because the density of both liquid and ice is roughly three orders of magnitude larger than that of vapor, and because both q i and q l typically smaller than q t are which in turn in much less than unity. Hence to a very good degree of approximation (better than one part in 100 000) in (1.116) we can neglect the specific volume of liquid or ice in comparison to the specific volume of the remainder of our system. Substituting for α v above noting that
α v
=
R v e
T and e = q d
R q v d
R v
+ q v
R v p (1.117) yields for the equation of state:
α =
( q d
R d
+ q v
R v
) T p
=
RT
, p
(1.118) which is identical to the equation of state derived in section 1.1.4 for a moist air in the absence of condensate. However, in this case q d
= 1 − q v
− q l
− q i which implies that the virtual temperature (and by analogy the virtual potential temperature) is
T v
= T (1 + q v
− q l
− q i
) .
(1.119)
The condensate and sublimate specific humidities are sometimes called the liquid and ice loading terms. They do not appear in the traditional form of T v as derived in (1.11). To distinguish this form of T v from that other expression some authors describe it as the density temperature and denote it T
ρ
.
1.4.3
Moist Enthalpy
In deriving the effective heat capacity of our system we made use of the enthalpy of an ideal mixture of water vapor and dry air. One property of ideal mixtures is that pressure, and extensive properties of the system are given by the sum of pressures and extensive properties of the subsystems. It also turns out that in ideal mixtures chemical potentials are additive. While we do not develop these ideas systematically here we do make extensive use of them.
1.4. PHASE CHANGES 39
Consider the enthalpy. For a system containing liquid water, dry air and water vapor we have
H = H
Because H = ( m d
+ m t
) h and d
+ H v
+ H
= m d h d
+ m v h v l
+ m l h l
= ( m d c pd
+ m v c pv
L v
= h v
− h l
+ m l c l
) T.
the specific moist enthalpy is simply: h = q d h d
+ r v
L v
+ q t h l
= ( q d c pd
+ q t c l
) T + L v r v
.
(1.120)
(1.121)
(1.122)
(1.123)
(1.124)
1.4.4
Equivalent Potential Temperature
For a system which allows phase changes between vapor and liquid one can also develop the concept of a potential temperature as the temperature air would have if isentropically brought to a reference state. However, in addition to specifying the reference state pressure, one must also specify the disposition of the water in this reference state. Commonly one of two reference states are chosen, either a reference state in which all the water is in the liquid form, so that the reference state entropy is simply:
η
0
= q d
η d, 0
+ q t
η l, 0
(1.125) or an all vapor reference state. The isobaric specific heat in such a reference state is simply q d c p,d
+ q t c l and denoted by c p, 0
.
In general, given a composite system consisting of vapor, liquid and dry air its specific entropy may be written as
η = q d
η d
+ q l
η l
+ q v
η v
; (1.126) where the entropies for the individual subsystems are,
T
η d
= η d, 0
+ c pd ln
+ c pv ln
T
0
T
η v
= η v, 0
η l
= η l, 0
+ c l ln
T
0
T
T
0
.
− R d ln
− R v p d p
0 e ln p
0
(1.127)
(1.128)
(1.129)
Replacing q l by q t
− q v in (1.126) allows us to express the specific entropy as
η = q d
η d
+ q t
η l
+ q v
( η v
− η l
) , (1.130)
40 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS which upon equating with η
0 for an all liquid reference state yields an expression of the form
T
0 = ( q d c p,d
+ q t c l
) ln
T
0
− q d
R d ln p d p
0
+ q v
( η v
− η l
) .
(1.131)
Solving for T
0 which we denote by θ e and call the equivalent potential temperature yields:
θ e
( η ) ≡ T
0
= T p p
0 d q d
R d
/c p, 0 exp q v
η v
− η l c p, 0
.
(1.132)
The term which remains in the exponential of (1.132) can be cast in terms of the thermodynamic coordinates ( T, e, p ) by first noting that
η v
− η l
= η v
= η v
− η s
− η s
+ η s
+
L v
− η l
,
T
(1.133)
(1.134) i.e., the difference between the saturated and liquid enthalpies is equal to the enthalpy differences between the phases (denoted by L v
). And second noting that the entropy differences for a elements of the same phase and temperature e
η v
− η s
= − R v ln p
0
|
− ln e s p
0
{z ln( e/e s
}
) .
(1.135) are measured by differences in the partial pressures. Substituting from above into
(1.132), and noting that p p
0 d
= p
0 p p p d
= p
0 p q d
R d
+ q v
R v q d
R d
, (1.136) yields a more interpretable expression for the equivalent potential temperature:
θ e
= T p p
( q d
R d
/c p, 0
)
Ω e exp where
Ω e
= 1 + q v
R v q d
R d
( q d
R d
/c p, 0
)
H
− ( q v
R v
/c p, 0
)
(1.138) captures the relative humidity ( H = e/e s
) dependence as well as the slight modification that arises to (1.132) when we express the pressure dependence in terms of p instead of p d
.
It is typically near unity so that to a reasonably good approximation
θ
0 e
≈ θ exp q v
L v c p,d
T
.
q v
L v c p, 0
T
, (1.137)
(1.139)
1.4. PHASE CHANGES 41
Further Reading
Much of the classical thermodynamics is developed following the outline by Fermi,
(1936) Thermodynamics. Fermi’s book is brief and some of the ideas are developed from a broader perspective in the classic text Statistical Physics, Part I (3rd edition) by Landau and Lifshitz. A development of the subject which might be more amenable to those with an engineering background is provided in An Introduction
to Thermodynamics, The Kinetic Theory of Gases, and Statistical Mechanics (2nd edition) by F. W. Sears (1953). As its title promises the latter also provides a nice introduction to the ideas of kinetic theory and statistical mechanics, ideas which are then developed more systematically by Landau and Lifshitz. My development of ocean thermodynamics draws heavily on unpublished course notes by G. Vallis of
Princeton University. Further references on the idiosyncrasies of atmospheric thermodynamics include the now out of print book Atmospheric Thermodynamics by
Iribarne and Godson, or the in print book of the same title by Bohren and Albrecht
(1998). The latter gives a more modern, and rather personal, treatment. A more advanced, and rather concise, treatment is also provided in the book Atmospheric
Convection by K. Emanuel (1994).
Exercises
1. By computing the temperature at a fixed density of 23 g m
− 3 compare the van der Waals equation of state with the ideal gas law representation of water vapor as a function of pressure for pressures ranging from 900 to 1000 hPa.
2. Consider an atmosphere composed solely of oxygen, nitrogen and argon, but in proportions which were not fixed. Derive an equation of state for this system and determine how the gas constants and specific heats depend on the composition. Derive an expression for the temperature a purely Nitrogen based atmosphere would need to have to have the same density as our multicomponent atmosphere at a 20
◦
C and 1000 hPa.
3. Calculate the coefficients of Eq. 1.16 given Eq. 1.15 and a reference state of
T = 0
◦
C, p = 0 bar and s = 35 ppt.
4. Suppose that dz = M ( x, y ) dx + N ( x, y ) dy.
Show that dz is an exact differential if
∂M
∂y
=
∂N
∂x
.
If these latter relations are not satisfied what does this imply about the functional dependence of z.
Interpret your results in terms of the first law.
42 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS
5. Draw an adiabat and an isotherm on a ( p, V ) diagram, explain physically why they differ.
6. Derive the profile of density as a function of height (through the troposphere) for an adiabatic uplift of dry air assuming that the atmospheric pressure dependence on height is given by the hydrostatic equation dp = − ρgdz.
Use
T = 20
◦
C, and p = 1000 hPa for your boundary conditions.
7. Compare the density of a human being to that of surface water for a freshwater lake, the Atlantic, Pacific, and Dead Sea, and to Atlantic Bottom Water.
Compare the variance of human density to ocean surface density.
8. Prove that all reversible engines operating between two reservoirs at constant temperatures have the same efficiency.
9. Use the above result to justify the absolute thermodynamics temperature scale of Kelvin.
10. If
θ ≡ T p p
00
R/c p is the potential temperature, find a relationship between changes in it and the entropy. Use the second law.
11. Summarize the main arguments in the Lieb and Yngvason article on entropy
(Physics Today, April 2000, page 32).
12. Derive the Clausius Clapeyron equation by noting that for a reversible transformation dg v
= dg l where g is the specific Gibbs function
13. Following the procedure used to derive θ e
, derive an expression for θ l the temperature a parcel of air would have in a reference state where all of its water mass was in the vapor form at some fixed reference pressure p
0
.
Interpret physically.
14. Summarize the different temperatures use do describe the atmosphere.
15. Derive the difference between c p and c v for sea water using Eqs.(1.43) and
(1.91) and the equation of state for sea-water.
16. Use Kirchhoff’s equation to derive a formula for the saturation vapor pressure, p
∗ as a function of temperature. Use the fact that c pw
= 4200 J kg
− 1
K
− 1 and c pv
= 1850 Jkg
− 1
K
− 1 and that at at T
0
= 0
◦
C p
∗
( T
0
) =
1.4. PHASE CHANGES 43
6.11 hPa, L v
( T
0
) = 2 .
5 MJkg
− 1
. Compare this to the more exact expression given in the notes. At about what temperature (above freezing) will the relative error be 1%.
44 CHAPTER 1. ATMOS & OCEAN THERMODYNAMICS
Chapter 2
Thermodynamic Processes, and
Convection
In the previous chapter we discussed how best to represent the thermodynamic state of atmospheric or oceanic fluids. We paid particular attention to the description of these fluids as two component systems. For the atmosphere the possibility of phase changes makes us think differently about what we mean by adiabatic, or isentropic.
In this chapter we build on the variables and concepts previously introduced to further investigate the structure of the atmosphere, and in particular motions induced by thermodynamic perturbations to the system. In so doing we introduce new tools and concepts that help guide our thinking. Although most of our discussion is developed in terms of the atmosphere, at the end of the chapter some analogies with oceanic convection are developed.
2.1
Aerological Diagrams
In our development of the thermodynamics we saw a glimpse of the power of thermodynamic diagrams. They can be used to represent the state of a system, a process, or sequence of processes. If properly constructed they can also yield important quantitative information, such as the work done during a process. For the atmosphere, thermodynamic diagrams are useful for all of these reasons and one: at a glimpse they can convey important information about the vertical structure of the atmosphere. This information can be critical in determining the subsequent evolution of the atmosphere and is routinely used by weather forecasters to evaluate the likelihood of different events, ranging from fog formation to the development of vigorous deep convective overturning.
For the above reasons the use of thermodynamic diagrams to study the atmo-
45
46 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION sphere has a rich history. When used in this context such diagrams are often referred to as aerological diagrams, largely because they document the state of the air.
Although many of these diagrams predate the widespread use of digital computers, and are motivated by the difficulty associated with directly computing various quantities, the use of several of them persist to this day. The most common being the SkewT diagram, and its cousin the Tephigram. Other aerological diagrams you might have heard of include the Clapeyron, the Emagram or Neuhoff, and the
St¨uve diagram.
(a) ln
Θ
(b)
−ln p
(c)
−ln p
T
T T
Figure 2.1: Thermodynamic coordinates for: (a) tephigram; (b) emagram; (c) skew-emagram (ln P SkewT ).
All of these diagrams have in common their projection of the atmospheric state onto the plane. They differ in their choice of thermodynamic coordinates, i.e., the axes of the plane, and the manner in which they orient these axes. Our focus here will be on the SkewT diagram, in which the thermodynamic coordinates are
Temperature along the abscissa and log pressure along the ordinate. The basic structure of this diagram, as well as for its cousins the Emagram and the Tephigram are all plotted in Fig. 2.1.
From the perspective of the thermodynamic coordinates, the SkewT and the
Emagram are identical, they only differ in that the coordinate axes are not orthogonal in the latter. Because isotherms will be parallel to the ln p axis and isobars will be parallel to the temperature axis, changing the orientation of the former leads to a greater distinction between isotherms and adiabats. On the SkewT they are almost perpendicular. In both, ln p is used as a thermodynamic coordinate (as opposed to p ) because the height of an isothermal atmosphere is proportional to ln p rather than p.
As a result the vertical coordinate of such a diagram is closely related to the height above the surface. The Tephigram differs from the Emagrams in that pressure is not a coordinate axis. However from the first law we have for the special
2.1. AEROLOGICAL DIAGRAMS 47 case of dry adiabats ln θ − ln T = −
R d c p ln p + const.
(2.1)
Thus associating the y -axis with ln θ and the x -axis with T we find that isobars are lines satisfying y = ln x + C.
In the range of practical interest the curvature in these lines ends up being small, so that if the diagram is appropriately rotated isobars become approximately horizontal. Thus on a practical level Tephigrams and SkewT s are very similar, the chief difference being that isobars are curved on the former and adiabats are slightly curved on the latter.
Isobars on a Tephigram and isentropes on a SkewT are examples of fundamental lines. That is they are not thermodynamic coordinates, but are isolines whose shape is decided by the thermodynamic coordinates. Other examples of fundamental lines include equisaturation curves, pseudo adiabats, and isotherms. Note that by a coordinate transform the fundamental lines of one thermodynamic diagram can serve as the thermodynamic coordinates of another.
Although the great variety of fundamental lines that can be added to a diagram can make it seem rather confusing and busy, they aid the experienced eye in deciding at a glance how the state of the system will change under a given process. To illustrate this consider Fig. 2.2 where we show a standard SkewT diagram, with the April 16th Brownsville Sounding superimposed. On this figure we note the following:
• Pressure decreases logarithmically upwards, leading to an almost linear relation between height and distance along the ordinate — as indicated by the black numbers which denote height in meters just to the right of the pressure values.
• Isotherms are plotted in 10
◦
C bands, which are shaded and converted to
Fahrenheit where they intersect the abscissa.
• Adiabats are thin lines with negative slope and slight curvature which intersect the isotherms nearly perpendicularly.
• Equisaturation curves, or curves of constant mixing ratio (recall that the mixing ratio r s
= q s
/q d
) which satisfy the relation r s
= e s
( T ) p − e s
( T )
R d
R v
, are inclined to the left of the isotherms. This follows because if we reduce the pressure along an isotherm we would expect r s to increase.
48 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION
Figure 2.2: USAF SkewT , ln p Diagram, with the Brownsville, Texas Sounding for 1200 UTC, 16 April, 2001
2.1. AEROLOGICAL DIAGRAMS 49
• What we call moist pseudo-adiabats are almost perpendicular to the abscissa near the surface and curve to become parallel to dry adiabats as p decreases.
pseudoadiabat moist adiabat saturated adiabat equisaturation dry adiabat isotherm isobar
Figure 2.3: Relative orientation of fundamental lines. Adapted from Fig. VI-4 of
Iribarne and Godson.
The relative orientation of the fundamental lines are illustrated more abstractly in Fig. 2.3. Among other things this figure illustrates slight differences in the slope of the dry versus the moist adiabat. Both are given by (1.77), except for the dry adiabat we set R
0 and c
0 p to R d and c pd respectively. That is the modification of the heat capacity and specific gas constant due to water vapor in our system is not accounted for. Because for moist systems R
0
/c
0 p
< R d
/c pd we expect the temperature to fall off less rapidly along a moist adiabat than it does along a dry adiabat.
In general the difference between the moist and the dry adiabats will depend on the moisture content of the air. For this reason moist adiabats are not fundamental lines on the diagrams we have discussed. They could be represented as fundamental surfaces on three dimensional diagrams which had moisture content marking the third dimension, but this becomes difficult to visualize.
2.1.1
Pseudo-Adiabats
For the same reason that moist adiabats do not constitute fundamental lines, saturated adiabats, such as lines of constant θ e also are not uniquely representable in the p − T plane. For this reason the concept of a pseudo-adiabat is often introduced.
In a pseudo-adiabatic expansion we neglect the contribution of liquid water to the heat capacity of the system. This is equivalent to assuming that upon condensation any liquid water that forms is precipitated from the system. Because this process is irreversible it is not isentropic. But because differences between this and the reversible process underling the definition of θ e are small we can consider it as a pseudo-isentropic process, and call the lines corresponding to it pseudo-isentropes, or pseudo adiabats – the latter being more common.
50 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION
Pseudo-adiabats have the advantage of being representable on the plane. Their disadvantage is that no known closed form expression for their representation exists. The problem arises because the prefactor in the expression for entropy is no longer independent of temperature. Thus to calculate how temperature changes with pressure along a pseudo-adiabat one must numerically integrate an equation for the lapse rate, that is the change in temperature with pressure (or height.) To see these difficulties consider the expression for the first and second law for a pseudoadiabatic process: ds ≥ d (( q d c pd
+ q s c l
) ln T ) − d ( q d
R d ln p d
) + d ( q s
L v
)
.
T
(2.2)
Even if the equality sign were to hold the temperature and pressure dependence of q s impedes integration.
Alternatively we can consider the enthalpy budget for a moist adiabatic system to derive the lapse rate. Starting from the definition of the moist static energy, h = c p
T + gz + L v q v we can derive the lapse rate for a process wherein dh = 0 .
Because dh depends on dq v
, where in the saturated region of the flow q v
= q s in equilibrium, so doing gives us a relationship between dT, dq s and dz.
Because q s
= f ( T, p ) its differential can be related to differentials of T and p, the latter being related to height differentials by the hydrostatic equation. Thus this procedure yields a unique relationship between temperature changes and height changes in processes with constant potential enthalpy. It is left as an exercise to show that these can be written as:
Γ m
≡ − dT dz
1 /c p ∗ h
= g z
" q d c pd
+ q s c pv
+
1 + q l c l
}| q s
L v q d
R d
T
+ q s
L
2 v
(1+ q s
R v
/q d
R d
)
R v
T
{
#
.
(2.3)
Note that (2.3) differs from the dry adiabatic lapse rate Γ d
≡ g/c p by the ratio of c p to c p ∗
, the latter being an effective isobaric specific heat that takes into account the enthalpy differences between the phases. Thus given the temperature at any height the temperature at other heights can be calculated by integrating Γ m
.
The pseudo-adiabat (Γ mp
) can be similarly derived. Its form is identical to (2.3) with c l
= 0 .
By inspection one can see that the effect of doing this is to increase the lapse rate, that is temperatures will decrease more rapidly with height along the pseudo-adiabat.
A straightforward calculation of the difference between pseudo-adiabats and adiabats shows that they differ most appreciably in the upper troposphere. This is
2.1. AEROLOGICAL DIAGRAMS 51 to be expected because T decreases with height, hence q s decreases and q l increases correspondingly. Overall the differences in T tend to be less than 0.5 K below 400 hPa increasing to as much as 3-5K between 100 and 200 hPa. Because in the upper troposphere ice processes play an increasingly important role the lack of correspondence between Γ m and Γ mp is less of a concern because the relevance of
Γ m is questionable here in the first place.
2.1.2
Polytropic Processes
One of course is not limited to drawing adiabats on a thermodynamic diagram. If the diabatic processes are well behaved they can be accounted for by compensated adiabats. An example of such a process is Polytropic expansion or compression.
Here we consider the change in state of a parcel that is cooling or heating at a fixed rate. Such a process is particularly relevant for the subsiding regions of the atmospheric circulation, such as are commonly found in the sub-tropics. In these regions the atmosphere descends steadily and cools radiatively as it does so.
This radiative cooling should be viewed as a diabatic process whose magnitude we denote by c pd
λδt (i.e., where λ is a heating rate) such that the appropriate form for the first law is simply: c pd
λδt = c pd dT −
R d
T dp, p
(2.4) where in the interest of clarity we develop the theory for the case of a single component fluid which we take to be dry air. If we look for a relation between temperature and pressure such that
T p
− κ q = const.
, (2.5) where κ q is a parameter to be determined, we find upon differentiation of (2.5) and substitution into the first law, that c pd
λδt = const.
( κ q c pd
− R d
) p
( κ q
− 1) dp.
(2.6)
Substituting for dp using the hydrostatic equation and substituting for p using (2.5) yields c pd
λδt = −
( κ q c pd
− R d
) gdz = 1 −
R d
κ q
κ d gdz, where κ d
=
R d c pd
, (2.7) which can be solved for κ q
:
κ q
= κ d
Q
1 − gdz
.
(2.8)
52 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION
This result suggests that a potential-like temperature can be used to specify T as a function of pressure, κ d is modified according to the heat absorbed per unity mass and unit length of transit. If we assume that the parcels change in position is uniform in time ( δz/δt = W ) then the coefficient κ q can be expressed as
κ q
= κ d
1 − c p
λ gW
.
(2.9)
That is for a polytropic process we can write
T = T
0 p p
0
κ q
, (2.10) where κ p is given by (2.9). In other words the lapse-rate of an atmosphere subsiding and cooling at a fixed rate, is simply
λ
Γ d
−
W
.
(2.11)
2.1.3
Soundings
Soundings in the atmosphere are measurements of its state as a function of altitude.
Generally they are made with a balloon which drifts with the mean wind as it rises and measures the wind vector, temperature and relative humidity along its trajectory. An example of such a sounding is shown in Fig. 2.2. Plotted are two lines, the right-most one denoting the temperature structure of the atmosphere, and the leftmost one being the dew-point temperature, T d
.
The dew-point temperature measures the moisture content of the atmosphere and indicates to what temperature the atmosphere must be isobarically cooled before condensation takes place. The wind is plotted with wind-barbs on the far-right, wherein the magnitude of the wind is denoted by the barbs and the direction by the orientation. Some things worth noting about the sounding are the following:
• The wind is primarily from the west at upper levels, and reaches a maximum of approximately 75 knots near 200 hPa.
• Surface winds are from the east with a southerly jet at 850 hPa.
• For the most part the temperature profile fluctuates between a rate of increase bounded by Γ d and Γ m
, tending to the latter between 600 and 200 hPa. Exceptions include a layer between 925 and 750 hPa in which the temperature is more isothermal than moist adiabatic, and a layer above 200 hPa where the profile is again more isothermal.
2.2. MIXING 53
• The minimum temperature at 200 hPa denotes the tropopause. The warmest air is at the surface, although if the air at 750 hPa were brought to the surface following a dry adiabat, it would be very much warmer, nearly 40
◦
C.
• If air at the surface could be mechanically forced (along a saturated adiabat) to an altitude of approximately 650 hPa it would begin to be warmer than its environment. Its subsequent trajectory is denoted by the dashed line.
• The moisture structure of the atmosphere is varied. A moist layer can be found at the surface but the warm air just above this is very dry, as is the air in the upper troposphere.
We will return to some of these features when we discuss atmospheric stability in Chapter 2.3.
2.2
Mixing
Mixing is the last anisentropic (diabatic) process that we wish to consider. The main point we wish to make in this context is that non-linearity in the thermodynamics can lead to rather un-expected behavior, and that in the atmosphere moist conserved variables have great utility in such circumstances. Although the nonlinear equation of state permits a variety of exotic behavior in the ocean we here focus for the moment on the atmosphere. Regarding un-expected behavior we illustrate this with the aid of two processes. The first illustrates how condensation can result from mixing two air-masses which are unsaturated. The second examines how the temperature of a mixture of two air-masses need not be bounded by the temperature of either of its constituent air masses.
For both cases we consider isobaric mixing in terms of the moist static energy, and we neglect compositional effects on the specific heats of mixtures, in which case we can write h = c p
T + gz + q v
L v
, (2.12) where c p and L v are taken to be constant. Extending our results to account for compositional effects on these quantities is straightforward, but algebraically cumbersome.
Before addressing the examples cited above we first develop some results and notation. Given two air masses as depicted in Fig. 2.7 we denote the mixed air mass as being of some mass m = m
1
+ m
2
.
Introducing the mixing fraction χ = m
2
/m and denoting by φ properties which mix linearly we note that in general:
φ = φ
1
+ χ ∆ φ, where ∆ φ = φ
2
− φ
1
.
(2.13)
54 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION h
1
, r t1 m
1 h
2
, r t2 h
, r t
, m m
2
Figure 2.4: Schematic of mixing.
Such a rule applies to materially conserved properties of the system such as the moist static energy and its water content, i.e., h = h
1
+ χ ∆ h and q t
= q t, 1
+ χ ∆ q t
.
These mixing rules will be used extensively in the subsequent discussion.
(2.14)
2.2.1
Saturation by isobaric mixing
Here we consider two air masses, indexed by i ∈ { 1 , 2 } .
Both are subsaturated, with the degree of subsaturation being given by δ i q.
Thus without loss of generality we may write q t,i
= q s
( T i
) − δ i q, where by our subsaturation assumption δ i q ≥ 0 .
Here we explore the possibility of the mixed state being just saturated, in which case q t
= q s
( T ) .
That is we consider when q t
= q t, 1
+ χ ∆ q t
= q s
( T ) , given T = T
1
+ χ ∆ T, (2.15) where the latter follows because the linear mixing of q t and h implies that T mixes linearly in systems without condensate. Expanding q s in a Taylor series about T
1
, yields the following relations: q s
( T ) = q s
( T
1
) +
∞
X
γ n
( T − T
1
) n
= q s
( T
1
) + n =1
∞
X
γ n
( χ ∆ T ) n n =1
(2.16)
(2.17) and q s
( T
2
) = q s
( T
1
) +
∞
X
γ n
(∆ T ) n
.
n =1
(2.18)
2.2. MIXING 55
The latter implies that
∆ q t
= ( q s
( T
2
) − δ
2 q ) − ( q s
( T
1
) − δ
1 q )
=
∞
X
γ n
(∆ T ) n
− ( δ
2 r − δ
1 r ) .
n =1
(2.19)
(2.20)
Substituting the above relations into (2.15), neglecting terms greater than order two in the Taylor Series and rearranging yields the following condition for the mixture to be just saturated:
δ
2 q = (1 − χ ) γ
2
(∆ T )
2
−
δ
1 q
χ
.
(2.21)
Which illustrates that condensation in the mixture is readily obtained so long as the condensation deficit in the respective components of the mixture is sufficiently small relative to the saturation change implied by the temperature difference. Note that this effect depends critically on the non-linearity in q s
( T ) .
If this equation were linear in T then γ n
= 0 for n > 1 and saturation by mixing of unsaturated parcels would be impossible.
2.2.2
Buoyancy Reversal
Another interesting phenomenon, thought to have broad consequences in the atmosphere is the idea of buoyancy reversal. Here the isobaric mixing of two systems can, through non-linearities in the equation of state, lead to a mixture whose temperature is not bounded by the temperatures of the constituent air masses. To illustrate this possibility we first consider the somewhat simpler situation whereby two air masses can mix to produce a mixed airmass whose temperature is less then either constituent. Physically one can imagine this happening when a saturated airmass (cloud) mixes with a subsaturated (dry) airmass resulting in evaporative cooling which cools the mixture. Clearly the maximum evaporative potential is realized when the mixed parcel is just saturated, implying that all of the liquid water in the cloudy parcel has been evaporated.
This can be expressed mathematically in terms of two parcels whose states are given by ( h
1
, q t 1
) and ( h
2
, q t 2
) respectively, with q t 1
> q s
( T
1
, p ) and T
2
> T
1
.
Relative to the first airmass the moist static energy of the mixture is simply h = h
1
+ δh, where from the definition of h for a saturated parcel,
δh = c p
δT + L v
δq s
.
(2.22)
56 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION
Note that for an unsaturated system the rightmost term is simply δq t which is independent of temperature. Because δq s
≈ q s
L v
R v
T 2
δT, for an isobaric process,
δh = c p
δT + q s
L
2 v
R v
T 2
δT.
Rearranging this implies that the temperature of the mixture is given by
(2.23)
δT =
δh c p
+ q s
L 2 v
R v
T 2
.
(2.24)
Thus the temperature perturbation of a saturated parcel is proportional to the perturbations in its moist static energy, which from the previous section is simply
δh = χ ∆ h = χ ( c p
∆ T + L v
∆ q v
) , (2.25) hence δT can have a different sign than ∆ T if ∆ h < 0 , equivalently if
−
L v c p
∆ q v
> ∆ T.
The approximate condition for temperature reversal can be readily extended to the case of buoyancy reversal by examining under what conditions δT v
< 0
Similarly more exact expressions can be found by restoring the compositional de-
.
pendencies on the specific heats, and accounting for the temperature dependence of L v given by Kirchoff’s relation. Note that the condition expressed as the condition that ∆Θ e
< 0 .
∆ h < 0 can also be
2.2.3
Mixing Diagrams
Clearly moist conserved variables provide a convenient framework for evaluating mixing processes. To make best use of this framework mixing diagrams are often introduced. These diagrams are constructed using variables that measure both the heat content of the air, and the moisture content, for instance h m and q t are obvious and popular choices. Then by plotting the air at different layers as points on the diagram one can evaluate the role of mixing in setting the structure of the atmosphere. For instance, on such a diagram intermediate layers whose thermodynamic state is set by the mixing of air from bounding layers should lie along a line which connects the states of the bounding layers. This would not be true if the state of the intermediate layers was set by differential advection, or other processes.
Although, q t and h (or its equivalent θ e
) are the most common choice for thermodynamic coordinates for mixing diagrams, their lack of orthogonality makes them sub-optimal. Because θ e is strongly influenced by q t such a diagram does not separate states as strongly as it could. To maximize the separation of states a better
2.3. STABILITY 57
2.3
Stability
The static stability of the atmosphere is governed by the rate at which density decreases with height. We can see this heuristically by considering the force on an initially static parcel of air with some density ˆ ( z ) in an environment characterized by the density ρ ( z ) – here we use un-decorated symbols to denote the environment and hats to denote the parcel – d ˆ dt
= d
2 z
0 dt 2
ρ
0
= −
ρ
0 g where ρ
0
= ˆ − ρ, (2.26) where here z
0 can be viewed as a parcel displacement z
0 from a reference height z = 0 .
For a parcel starting with the environmental value of ρ at some reference height z ref after a small displacement z
0 we can evaluate its acceleration as
= ˆ − z
0 d 2 z
0 dt 2
≈ − g
ρ d ˆ dz
− dρ dz z
0 z
0
≈ − g
1 d ˆ dz
−
1
ρ dρ dz z
0
.
(2.27)
Where this expression arises from taking the leading order of the Taylor series expansion of ˆ and ρ about z ref
.
Hence both approximations are increasingly valid in the limit of small δz.
Equation 2.27 is just the oscillator equation with frequency
N
2
= g
1 d ˆ dz
−
1 dρ
ρ dz
.
(2.28)
It implies that the condition for stability of parcels to density perturbations is that
N 2 > 0 .
If the density of a parcel decreases with height more rapidly than does its environment, i.e., if d ˆ dz
< dρ
, dz
(2.29) then N
2
< 0 and (2.27) implies exponentially growing modes, or instability. This buoyancy frequency, N
2
, is called the Brunt-V¨ais¨all¨a frequency, and it provides a simple measure of the static stability of the atmosphere. In an inviscid atmosphere
N
2
< 0 is a sufficient condition for instability, whereas N
2
> 0 characterizes the gravity wave frequency.
With the aid of the ideal gas law N 2 can be phrased in terms of the temperature lapse rate, which upon neglect of pressure fluctuations is proportional to the density lapse rate:
N
2 d
= − g dz ln ˆ − ln T .
(2.30)
58 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION
However, by the first law the change of temperature of a parcel with height is governed by the dry adiabatic lapse rate, Γ d
, from which it follows that
N
2 g
=
T dT dz
+ Γ d
, (2.31) where here T is the environmental temperature. Thus another way to phrase the condition for inviscid static instability is to require the environmental temperature to decrease faster with height than does the dry adiabatic lapse rate. Alternatively we can work in terms of potential temperature. So doing allows us to express the
N
2 entirely in terms of the environmental conditions:
N
2
= g
θ dθ dz
.
(2.32)
The simplicity of this equation originates in the conservation properties of θ ; its variations vanish for adiabatic processes.
In a moist (but unsaturated) atmosphere density variations depend also on variations of the specific humidity (or water vapor mixing ratio) with height, while in a saturated atmosphere the effects of latent heat release must also be accounted for.
Consider the saturated case with (2.28) as our starting point. For density perturbations to a saturated atmosphere which obeys the saturated equation of state we have dρ
ρ
= − dT
T
= − dT
T
+
R d dq t
−
R
1 + q s
L v q d
R d
T q q s
R v d
R d
+ dr t
L v
R v
T dT
T
R d
R
,
(2.33)
(2.34) where the second component of the dT term arises from relating isobaric variations in r s to perturbations in T through the Clausius-Clapeyron equation, and R = q s
R v
+ q d
R d is the gas constant for the composite system. Substituting the above in (2.28) and noting that d ˆ dz t
= 0 and d
ˆ
≡ − Γ m
, dz
(2.35) yields the following expression for the static stability in a saturated atmosphere:
N
2 m g
=
T dT dz
+ Γ m
1 +
L v q d
R d
T
− gR d
R dr t
, dz
(2.36) where we use subscript m (referring to moist, actually saturated) to delineate it from the dry static stability.
N
2 m differs from N
2 in that it must account for changes in the environmental lapse rate of r t as well as the effect of condensation/evaporation on the temperature lapse rates.
2.3. STABILITY 59
2.3.1
Moist convective instability
Except for the few tens of meters nearest the ground during a warm day, the static stability of the atmosphere is almost never negative. This is evident in both
Fig. 2.2 and Fig. 2.8 where the environmental temperatures decrease everywhere less rapidly than does the dry adiabat. Yet the overturning of the atmospheric column manifest in many severe storms must be an expression of some form of instability. What might this be? It turns out that while the atmosphere is rarely statically unstable, it is frequently conditionally unstable. By conditionally unstable we mean that the atmosphere is unstable if the displacements are of saturated air. Thus instead of N
2 being the determining parameter, the sign of N
2 m is decisive. These different measures of atmospheric stability are delineated with the help of Fig. 2.5 below.
The conditional instability of the atmosphere is conditioned on the saturation of the parcel. That is the instability will be realized only if saturated parcels are displaced.
conditional instability dry adiabat saturated adiabat isotherm
This property of the moist system allows a kind of finite amplitude instability not found in dry atmospheres.
By finite amplitude we mean that while the atmosphere might be stable
Γ d absolute instability
Γ m absolute stability inversion isobar to infinitesimal perturbations, larger perturbations are potentially unstable.
Consider the sounding in Fig. 2.2. Air very
Figure 2.5: Different regions of atmospheric stability, as delineated by the fundamental lines on a Skew-
Godson.
T diagram. Adapted from Iribarne and near the surface is nearly saturated. If it is lifted adiabatically its temperature will decrease along a dry adiabat and its dew-point will increase along a line of constant saturation mixing ratio until they meet, at approximately 1000 hPa. This level is called the lifting condensation level or LCL.
Further displacements of the parcel will be along a moist adiabat. Here we see that such displacements are stable through a layer of 350 hPa. However, if somehow enough work were done on a surface parcel, to lift it to approximately
650 hPa, further displacements would result in a parcel which is warmer than its environment. At this point, instead of having to do work on the environment to lift the parcel, the environment will do work on the parcel, and the parcel will begin to accelerate upwards. At this point, which we refer to as the level of free convection
60 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION
(or LFC), we speak of the parcel being unstable.
In the process just described surface parcels of air were stable to small perturbations, but not with respect to deeper perturbations. In the above case the atmosphere is unstable to perturbations which mechanically, and adiabatically lift parcels to pressures less than 650 hPa. Note however that at the level of free convection the atmosphere is not absolutely unstable, i.e., unstable to perturbations to the air at this level. This is because the air at 650 hPa is far from saturation, as it is considerably drier than air that is adiabatically lifted from the surface. Thus, unlike a dry atmosphere in which any finite amplitude instability implies an infinitesimal instability, a moist atmosphere can be truly stable to infinitesimal perturbations, but unstable to finite amplitude ones.
2.3.2
CAPE
To measure the amount of work the atmosphere is capable of doing on a parcel lifted to its level of free convection the concept of convective available potential energy (CAPE) is introduced (and denoted by A ) :
A =
Z z nb z f c bdz, (2.37) where b is the buoyancy (or reduced gravity) and has units of acceleration, z f c is the level of free convection and z nb is the level of neutral buoyancy (LNB). This is the level at which the parcel lifted along the specified adiabat, or pseudo-adiabat, ceases to be buoyant relative to the environment. Most of the time z nb the tropopause.
is just above
From our development of the Boussinesq equations we note that the buoyancy for a moist fluid can, under certain circumstances, be expressed in terms of temperature fluctuations:
ρ
0 b = − g
ρ
0
≈ g
T
0 v
T v 0
.
(2.38)
Substituting (2.38) into (2.37) and using the hydrostatic equation yields
A =
Z p f c
R d
T v
0 d ln p.
p n b
(2.39)
Thus on the SkewT diagram (e.g., Fig. 2.2) A is proportional to the area between the environmental temperature and the dashed line.
CAPE as defined by (2.37) of course depends on the parcel being lifted and the manner in which it is lifted. Small differences in the initial state of a parcel can lead to large differences in A .
For instance, the sounding plotted in Fig. 2.2
2.3. STABILITY 61 is taken from just before sunrise. During the day we expect the surface air to heat up. If it heats 5
◦
C and we recalculate the A for a parcel with the identical moisture content, but which is 5
◦
C warmer we will find that it increases almost 100%, from
1 400 J kg
− 1 to 2 350 J kg
− 1
.
Given that A describes the work the atmosphere can do on a parcel, or alternatively the potential energy available to a convecting parcel, it can be related to the maximum kinetic energy. That is it bounds the amount of kinetic energy a parcel could have, thus defining a velocity scale: w max
=
√
2 A (2.40) which is another measure of the intensity of convection.
Other CAPE-like Measures
CAPE is the most common measure of the potential instability of the atmospheric column. While it constitutes a necessary condition for instability, many other factors can come into play. The amount of work one must generally do to access the
CAPE of a sounding is highly variable. In some cases one does not have to do a large amount of work on a parcel before the atmosphere starts returning the favor.
To measure this aspect of the atmosphere another parameter, called Convective Inhibition (or CIN) is sometimes introduced. It is the analog to CAPE, but measures the amount of work that must be done to lift a parcel from some reference level to its level of free convection:
CIN = −
Z p f c p ref
R d
T v
0 d ln p.
(2.41)
Thus the potential instability of the atmosphere depends not on CAPE alone, but also on other factors such as CIN.
Another CAPE like measure of the atmosphere is called down-draft CAPE, or D . It is illustrated in reference to regular CAPE in Fig. 2.6.
D measures the stability of saturated downward displacements of air first brought to its wet-bulb temperature by evaporation of falling rain. The wet-bulb temperature (sometimes denoted T w
) is bounded by the dew-point temperature and the actual temperature.
It is the temperature that one gets by isobarically bringing air to saturation through evaporation. Because water is evaporated into the air, the air both cools and moistens increasing its mixing ratio while decreasing its temperature.
Thus we can write
D ( p i
) =
Z p sf c
R d
T
0 v d ln p, p i
(2.42)
62 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION
Tw,pi r
Td
D
Tsat
A
T
Figure 2.6: Illustration of different types of CAPE using the Brownsville sounding of Fig. 2.2
where here T v
( p i
) = T w and T v
0 a saturated parcel initially at T v is the difference between the virtual temperature of
( p i
) and the environmental value of T v for parcels following saturated adiabats. Physically D measures the stability of air to evaporation of rain. In environments with large values of D vigorous down-drafts can be formed by evaporating water (from precipitation) into a dry ambient environment. This is analogous to the process discussed in Chapter 6, whereby negatively buoyant parcels can be created through isobaric mixing.
Caveats on CAPE
As alluded to above the actual CAPE of a given atmospheric sounding is not a number without ambiguity. This ambiguity stems mostly from the varied definitions associated with it. Above we have defined CAPE to be the positive area on the thermodynamic diagram. Others define it to be the net positive area associated with a parcel lifted dry adiabatically from the surface to the level of neutral buoyancy. Others compute the CAPE associated with a parcel characterized by the
mean properties of the lower 10-50 hPa of the atmosphere. Yet others adjust the surface properties of the sounding to reflect what they anticipate conditions will be like at the height of the day.
The thermodynamic processes which govern the evolution of the state of the parcel above the lifting condensation level also play a large role in determining
CAPE. For instance parcels in which ice forms will have different values of CAPE than parcels assumed to follow a pseudo-adiabat. Thus CAPE can be seen as a
2.3. STABILITY 63 function of the state of a parcel, the environment, and the specified type of thermodynamic process. These ambiguities do not diminish the value of a measure like
CAPE, but they do indicate that if it is to be used quantitatively one must be clear as to what one means when referring to it.
2.3.3
Oceanic convection
For the most part convection in the ocean does not exhibit the exotic behavior associated with moist atmospheric processes. However, two processes, thermobaric convection and cabbeling, are analogous to conditional instability and buoyancy reversal respectively, and their discussion is useful to help provide perspective on these phenomena.
Thermobaric Effects
Recall the approximate equation of state for seawater given by (1.16).
α = α
0
[1 + β t
( T − T
0
) − β s
( s − s
0
) − β p
( p − p
0
)]
+ α
0
γ
∗
( p − p
0
)( T − T
0
) +
β
∗ t
( T − T
0
)
2
2
The thermobaric parameter is denoted by γ.
(2.43)
Cabbeling
Figure 2.7: Isopycs for seawater, as a function of temperature and salinity. Also shown is the mixing line between two states (denoted by A and B denoted by the dashed line).
The process of cabbeling is best illustrated by a consideration of two parcels whose states are denoted by the points A and B on Fig. 2.7. Both have the same density at their given pressure, but have different temperatures and salinities. Mixtures of the two parcels would be expected to have some intermediate temperature and salinity and be confined to a mixing line as denoted by the dashed line. Because the dashed line lies below (at higher density) than the isopyc of its parent
64 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION mixture it will tend to be convectively unstable and descend. Hence as was the case for buoyancy reversal, where mixtures of two parcels could have a density greater than either constituent, this process in the ocean may generate convective motions. This process may be involved in the formation of bottom water in the
Weddell Sea.
Further Reading
Some of this material is covered in a more cursory fashion in Section 9.5 of An
introduction to Dynamic Meteorology by Holton. More extensive treatments are also given in Atmospheric Thermodynamics by Iribarne and Godson, the book of the same title by Bohren and Albrecht (1998) and in Atmospheric Convection by
K. Emanuel (1994).
Exercises
1. Construct a Tephigram plotting at least one iso-line of pressure, equisaturation, and pseudo-potential temperature.
2. On the standard SkewT heights are written adjacent to the isobars. Are these heights for an isothermal atmosphere, and adiabatic atmosphere, or something in between? Justify your answer with a calculation.
3. Derive (2.3) stating all assumptions.
4. Does the temperature along a saturated adiabat decrease more or less rapidly with height than it does along a pseudo-adiabat. Justify your answer physically.
5. Discuss the sounding in Fig. 2.8. What processes might explain the structure of the atmosphere at the various heights.
6. Plot temperature versus pressure on the SkewT diagram in Fig. 2.8 for the polytropic process corresponding to cooling of 2 K day
− 1 and descent of 1 cm s
− 1
.
7. Use the appropriate moist conserved variable and a SkewT to estimate the difference between temperatures for a parcel following a reversible saturated adiabat and a pseudo-adiabat. Let the parcel be just saturated at 0.1 MPa at a Temperature of 20
◦
C.
2.3. STABILITY 65
8. The dew-point temperature is the temperature of air when brought isobarically to saturation. Derive an expression for the dew-point temperature
9. Neglecting compositional effects on the specific heats, find the condition for buoyancy reversal δT v
< 0 given ∆ T v
> 0 .
10. Repeat the derivation of temperature reversal but this time account for the compositional effects on the specific heats.
11. Express N
2 m in terms of moist conserved variables.
12. Plot the Emanuel, Del Rio Texas sounding on a SkewT diagram and discuss its stability. Identify the pressures corresponding to the LCL, LFC and LNB for air lifted from the surface.
13. Repeat the previous question for the Emanuel tropical west-Pacific sounding.
66 CHAPTER 2. THERMODYNAMIC PROCESSES, AND CONVECTION
Figure 2.8: 15 April 2001 (1200 UTC) sounding from Kaui.