reflection and mirrors2010
advertisement

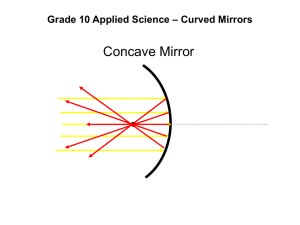
Reflection at Mirrors and Curved Surfaces Amy C Nau, OD Regular (specular) reflection Reflected light leaves the surface in definite beams that follows the laws of reflection. Occurs at smooth surfaces. Think of throwing a ball against a wall, or playing pool Specular Reflection http://www.glenbrook.k12.il.us/gbssci/phys/Class/refln/u13l1d.html Reflection at Plane Surface N The incident angle determines the final direction of the ball Incident and emergent angles are measured from a perpendicular line (normal) to the surface (interface). Law of Reflection Incident ray Normal Incident angle Reflected angle Reflected ray Medium 1 (n) interface qi qr Medium 2 (n’) The angle of incidence is equal to the angle of reflection qi=qr Law of Plane Mirrors the states that "the image is always the same distance behind the mirror as the object is in front of the mirror." eye Rays entering the eye are diverged from the mirror's surface. Since the eye has to "dot back" the rays to form an image, this image is virtual The image is upright, but left-right reversed Distance of the image = distance of the object Mirrors Obey the Law of Reflection: the angle of incidence equals the angle of reflection Note that these angles are measured from the normal to either the incident or reflected rays. Mirrors The following diagram illustrates that the minimum length of a plane mirror required for someone to view their entire image equals half their height. http://dev.physicslab.org/Document.aspx?doctype=3&filename=GeometricOptics_PlaneMirrors.xml Mirrors the magnification of a plane mirror equals one. Size of image = size of object Recall that magnification is calculated using the formula: Reflection at a Plane Mirror Incident ray Reflected ray Real space Real object Real image Reflecting surface Virtual space Virutal object Virtual image Reflection at plane mirror Law of reflection states that incident and reflected angles are equal. Opposite internal angles aremirror also equal Virtual, erect image Real object l l’ l=-l’ Reflection Basics Rays leaving the surface diverge as though they came from the image position The image is virtual, erect and equal An image, although reversed, will have the same size and orientation as the object The image distance is equal in magnitude to the object distance (but opposite in sign) If you stand 1m in front of a mirror, you will see your image 1 m behind the mirror Deviation of Rays at Reflecting Surface qr 90-qr 90-qi Plane Mirrors the image produced is upright the image is the same size as the object the image distance = the object distance the image is a virtual image Spherical Mirrors They are either convex (reflective surface outside a sphere) Or they are concave (reflective surface inside a sphere) You may easily experience this by looking into a serving spoon If convex, your image is virtual, upright and reduced in size. Covnex mirrors are considered to be negative mirrors If concave, your image can be real or virtual depending On where the object is located relative to the focal point. Convex Mirror Shiny surface is the front of the mirror. The radius is behind the mirror and is represented By the line VC where V is the vertex of our convex mirror and C is the center of a ball. The focal length, f, is half of the radius, or the length of the line VF. F is called the focal point. Ray Diagrams All three reflected rays diverge. Their "dotted back reflections" always form virtual, upright, reduced images located between V and F. Concave Mirror If the light rays, once reflected off the mirror, converge back together, then the image will be real. It is called a real image because the actual, real, rays of light form the image. Real images have the property that they are always inverted and left-right reversed Concave Mirror object located infinitely far away http://dev.physicslab.org/Document.aspx?doctype=3&filename=GeometricOptics_SphericalMirrors.xml Concave Mirror located in region 1 object is located in region II Concave mirror summary any object beyond C will have an image that is real, inverted compared to the object, and between F and C. any object placed between F and C will have an image that is real, inverted, and beyond C. when the object is between F and the mirror the image will be behind the mirror, making it a virtual image, and it will be upright compared to the object. Magnification Convex mirrors = minification; Concave mirrors = magnification http://www.wfu.edu/physics/demolabs/dem os/avimov/bychptr/chptr9_optics.htm Curved Surfaces Object Space Index before refraction (or reflection) n Real objects Virtual images Image Space Index post refraction or reflection n’ Real images Virtual objects + direction of light Negative measurements Positive measurements Curved Surfaces Real object- object that emits divergent wavefronts. Radius and vergence are negative, Real objects must be to the left of the interface Real Image- image formed with convergent wavefronts, which have positive values. Located at the right of the interface and can be formed on a screen Curved Surfaces Virtual object- when convergent wavefront is obstructed by an obstacle (i.e. refracting surface) the position to which the wavefront is headed is the virtual object position. To the right of the interface Virtual image- when divergent wavefront leaves a refracting surface, the center of curvature of the wavefront is the virtual image position. Located to the left of the interface Curved Surfaces Gaussian Imaging Equation: Used to calculate object position, image position and power. A refracting surface changes the vergence of light incident upon it. The amount of change is equal to the power of the surface L’=L+F L’=emerging vergence after refract L= incident vergence F= power of the surface Curved Refracting Surfaces Any point on a curved surface reflects light according to Snell’s law. The shape of the surface will determine the size, position, type and quality of the resulting image Spheres are used for Rx lenses, contacts, IOL’s, instruments We will only consider one surface for simplicity Curved Surfaces- some concepts Spherical surface is defined by the radius, curvature or power Radius- distance from arc to any point Curvature- reciprocal of radius Center of curvature - equidistant form any point on surface Sag- perpendicular distance from chord to surface Chord- straight line connecting any two points on any arc Curved Surfaces Center of curvature radius sag chord Contact lens formula for sag depth r=y2/2s+s/2 Radius-Power Relationship F=n’-n/r Clinically, this is commonly used to convert K readings to radius readings. This is also the premise of a “lens clock”, which is used to measure lens power Power is + when wavelength converges and - for diverging wavelengths. Curved Mirrors F=n’-n holds, but since n’=n for mirrors, the formula can be rewritten as F=-2n/r Multiple Images Two mirrors facing each other form multiple (infinite) images of the object placed between them