Physical Database
advertisement

Physical Database
Physical Design Activities
• Minimize the number of disk accesses
• Minimize the amount of space used to
store the data
• Provide for data integrity and protect the
data from loss
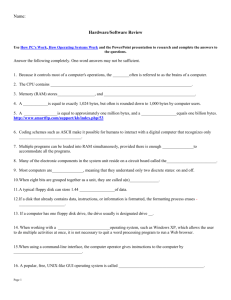
Disk Storage Devices
• Disk units are referred to as direct access
storage device or DASD ( daz_dee)
• Offer high storage capacity and low cost
• Data stored as magnetized areas on magnetic
disk surfaces.
• A disk pack contains several magnetic disks
connected to a rotating spindle.
• For disk packs, the tracks with the same diameter
on the various surfaces are called a cylinder. (a
set of tracks that can be accessed w/o moving
arms)
Cont’
• Disks are divided into concentric circular tracks on each disk
surface. Track capacity vary typically from 4 to 50 Kbytes. (about
800 tracks)
• Each concentric circle stores the same amount of information, so bits
are packed more densely on the smaller-diameter tracks.
• A track is divided into sectors or blocks (or data page). The division
of a track into equal-sized blocks is set by the OS during disk
formatting. So, The block size B is fixed for each system.
• A block is a unit of space read/written by the disk head. Typical
block sizes range from 512 bytes to 4096 bytes. A whole block is
transferred between disk and main memory for processing. (Typical
Unix sys: 2 KB; mainframe: 4KB; 1.44 floppy: 512B)
This means the bigger the block size, the faster the data read/write
time. However, the storage could also be wasted.
Cont’
• In Oracle, the overhead to manage a block is
approximately 90 bytes for a table, and 161 bytes for an
index (about 80% are used for data).
• Blocks are separated by fixed-size interblock gaps.
• A section of memory set aside to receive a block of data
is called a buffer. Typically, a buffer size is the same as
the block size. There are many buffers in commercial
systems. (500-3000).
• A read-write head moves to the track that contains the
block to be transferred (seek time). Disk rotation moves
the block under the read-write head for reading or writing
(rotational delay or latency).
Cont’
• Reading or writing a disk block is time-consuming because of the
seek time s and rotational delay (latency) rd.
• Thus, the access time (the average time required to access a
single data record) will be:
Average_Seek_time + Avg_Latency + Block_Transfer_time
where Block_Transfer_time = Transfer_Rate x Block_Size
• Typical access time ranges from 10-60 milliseconds
• The seek time >> rotational delay >> BTT.
So, it is common to transfer several consecutive blocks on the same
track or cylinder. (to eliminate ST and RD)
Cont’
• Locating data on a disk is a major bottle
neck in db applications.
• A physical disk block address consists of a
surface number, track number (within
surface), and block number (within track).
Cont’
• Mainframe systems call each disk unit a volume, and each volume
has a volume table of content (VTOC).
• In the MS-DOS, the data entry info. is stored into a file allocation
table (FAT).
• Typically, relative addressing is used. Each record has a relative
record number. The first record is 0 or certain displacement, etc.
• To speed up processing, double buffering can be used. Once one
buffer is full, the CPU can start processing; at the same time, the I/O
processor can be reading and transferring the next block into a
different buffer.
Files of Records
• A file is a sequence of records, where each
record is a collection of data values (or data
items).
• A file descriptor (or file header) includes info.
that describes the file, such as field names and
their data types, and the address of the file
blocks on disk.
• Records are stored on disk blocks. The blocking
factor bfr for a file is the average number of
records stored in a disk block.
Cont’
• A file can have fixed-length records or variable-length
records.
• File records can be unspanned (no record can span two
blocks) or spanned (a record can be stored in more than
one block).
• In a file of fixed-length records, all records have the
same format. Usually, unspanned blocking is used with
such files.
• Files of variable-length records require additional info. to
be stored in each record, such as separator characters
and field types. Usually spanned blocking is used with
such files.
• The physical disk blocks that are allocated to hold the
records of a file can be contiguous, linked, or indexed
Typical Operations on Files
OPEN, FIND, FIND NEXT, READ, INSERT,
DELETE, MODIFY, CLOSE,
REORGANIZE, READ_ORDERED
Primary File Organization
• Unordered Files
• Ordered Files
• Hashed Files
Unordered Files
• Also called a heap or a pile file, new records are
inserted at the end of the file.
• To search for a record, a linear search through
the file records is necessary. This requires
reading and searching half the file blocks on the
average, and is hence quite expensive.
• Record insertion is quite efficient.
• Reading the records in order of a particular field
requires sorting the file records.
Ordered Files
• Also called a sequential ( ordered) file.
• File records are kept sorted by the values of an ordering
field.
• Insertion is expensive; records must be inserted in the
correct order. It is common to keep a separate
unordered overflow (or transaction) file for new records
to improve insertion efficiency; this is periodically
merged with the main ordered file.
• A binary search can be used to search for a record on its
ordering field value. This requires reading and searching
log2 (b) blocks on the average, an improvement over
linear search.
• Reading the records in order of the ordering field is
efficient
Hashed (Direct) Files
Static External Hashing
• Hashing refers to the process of converting attribute
values directly into addresses.
• Hashing for disk files is called external hashing
• The file blocks are divided into M equal-sized
buckets, numbered bucket0, bucket1 , ...., bucketM-1.
Typically, a bucket corresponds to one (or a fixed
number of) disk blocks.
• One of the file fields is designated to be the hash key
of the file.
Cont’
• The record with hash key value K is stored in bucket i,
where i = h(K), and h is the hash function.
• Collisions occur when a new record hashes to a bucket
that is already full. An overflow file is kept for storing
such records. Overflow records that hash to each
bucket can be linked together.
• To reduce overflow records, a hash file is typically kept
70-80% full. If we expect to have r records to store in the
table, we should choose M locations for the address
space such that (r/M) is between 0.7 and 0.9.
Cont’
• Typically, M is a prime number since it
distributes randomly via MOD fn.
• The hash fn h should distribute the records
uniformly among the buckets; otherwise search
time will be increased because many overflow
records will exist.
• Main advantages: search is efficient; in most
cases, needs a single block access to retrieve
that record (fastest possible access, given the
hash value)
Disadvantage
• No ordering of records
• No search other than hash field
• Fixed buckets M is a problem if # of
records grows or shrinks
Cont’
• Only OpenIngres and ORACLE support
hashing.
• Oracle supports hashing in terms of table
clustering
Index Structures for Files
1. Iindexes as Access Paths
2. Types of Single-level Indexe :
Primary Indexes, Clustering Indexes,
Secondary Index
3. Multi-level Indexes
4. Using B-Trees and B+-Trees as Dynamic
Multi-level Indexes
5. Indexes and Performance Optimization
Indexes as Access Paths
• A single-level index is an auxiliary file that makes
it more efficient to search for a record in the
data file.
• The index is usually specified on one field of the
file (could be multiple fields)
- Oracle allows up to 16 attributes (or max
1000-2000 bytes)
• One form of an index is a file of entries
<field_value, pointer_to_record>, which is
ordered by the field value so that a binary
search can be used.
Cont’
The index is called an access path on the
field.
• Indexes speed up retrieval of data.
- Most beneficial for read-intensive and
large files
- Write/update-intensive (volatile) files
produce overheads
Types of Indexes
•
•
•
•
Primary Index
Clustering Index
Secondary Index
Multi-Level Indexes
Primary Index
• Defined on an ordered data file whose records
are fixed length with 2 fields
(ordering key field + pointer to a disk block)
• The data file is physically ordered on a Primary
Key or an ordering field
• Includes one index entry (or index record) for
each block in the data file
(Not every ordering field value appears as an
index entry)
Cont’
• The index entry has the ordering field
value for the first record in the block, which
is called the block anchor
• A similar scheme can use the last record
in a block
Cont’
A primary index is an example of a nondense
(sparse) index;
• A Nondense index: has an entry for each disk
block of the data file
• A Dense index: has an entry for each record
Cont’
• Major problems: insertion and deletion of
records
- Use either unordered overflow file or a
linked list of overflow records for each
block in the data file.
Example
Suppose we have an ordered file EMP (Name,
SSN, Address, Job, Sal, ....), record size R =
100 bytes (fixed and unspanned), block size B
= 2048 bytes, #records r = 30,000 records,
Blocking factor Bfr = B/R = CEIL(2048/100) =
20 records/block
CEIL(X) returns a next higher integer value after
truncation.
E.g., CEIL(5.6) returns 6; or CEIL(12.01) returns
13.
The number of file blocks b = CEIL(r/Bfr) =
CEIL(30000/20) = 1500 blocks
Cont’
(a) No index; use linear search:
An average linear search cost of (b/2) =
(1500)/2 = 750 block accesses
(b) No index; use binary search:
A binary search on the data file would
need log2 b = log2 (1500) = 11 block
accesses
Cont’
(c) Index; use binary search:
Suppose Length(SSN) = 9 bytes and a block pointer P = 6
bytes
Index entry size IE_Size = (9 +6) = 15 bytes
The Bfr for the index is (B/IE_size) = BOTTOM(2048/15)
=BOTTOM(136.53) = 136 entries/block
The total # of index entries = 1500
The number of index blocks = CEIL(1500/136) = 12 blocks
A binary search on the index file would need CEIL(log2 b) =
CEIL(log2 (12)) = 4 block accesses
To search for a record using the index, needs one additional block
access. So, a total of 4 + 1 = 5 block accesses is needed
Cont’
• Comparison:
(Linear_Search: No_Index_&_BS :
Index_&_BS) = (750 : 11 : 5)
• BS = Binary Search
Clustering Index
• Defined on a data file physically ordered on a non-key
field that does not have a distinct value for each
record.
• A relation can have at most one clustering index.
• The field is called the clustering field.
• Includes one index entry (index record) for each
distinct value of the field
• The index entry points to the first data block that
contains records w/ that indexed field value
Secondary Index
• Defined on an unordered data file
• Can be defined on a key field or a non-key field
• Includes one index entry for each record in the
data file: dense index.
• A block anchor cannot be used in the secondary
index because the records of the data file are not
physically ordered by values of the secondary key
field.
Cont’
• A secondary index for a key field is a dense
index (one entry/record)
• A secondary index for a non-key field could be
densed or nondensed.
• A secondary index provides a logical ordering
on the records by the indexing field.
• There can be many secondary indexes for a
data file
• A secondary index is called an inverted index
Multi-Level Indexes
Because a single-level index is an ordered file, we
can create a primary index to the index itself.
• We call the original index the first-level index and
the index to the index the second-level index
• We can repeat this process, creating a 3rd, 4th,
..., top level until all entries of the top level fit in
one disk block
Cont’
• A multi-level index can be created for any type
of first-level index (primary, clustering,
secondary) as long as the first-level index
consists of more than one disk block
• Such a multi-level index is a form of search
tree; however, insertion and deletion of new
index entries is a severe problem because
every level of the index is an ordered file
• Hence, most multi-level indexes use B-tree or
B+ tree data structures, which leave space in
each tree node (disk block) to allow for new
index entries
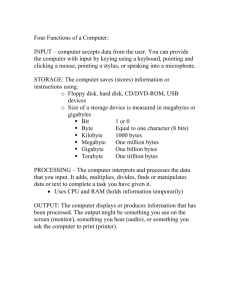
Example of Multi-level Tree
Index
a) A table with 1 M records, Index value: 8 bytes
and Pointer to row ID: 6 bytes, So, 14 bytes/index
entry
b) 1 block = 2 KB, Assume the block header
overhead is 150 bytes and the fill factor is 0.80.,
Actual 1 block space = (block size - block header
overhead)* fill_factor = (2 KB – 150) * 0.80 =
(2048-150)*0.8 = 1518 bytes, Index Blocking
Factor, BF = BOTTOM(1518/14) = 108 index
records
Cont’
c) #disk blocks necessary for storing 1 M records
CEIL (1,000,000/108) = 9,260 blocks (disk blocks)
Therefore, we have 9,260 blocks at the leaf level
and 9,260 node pointers at the directory level to
the leaf level
Cont’
d) The space for directory entries at a higher level:
CEIL (9,260/108) = 86 blocks
e) Now we can create a root of the index tree with
a single block. Thus, the index tree for this
example consists of 3 levels:
Root:
1 block
2nd level: 86 blocks
3rd level: 9,260 blocks
Cont’
f) Finding the index entry needs only 3 block accesses in
this example.
log108 (1 million) < 3
This is more efficient than disk binary search
log2 (1 million) = 20 block access
In general, for a tree of depth K with the blocking factor
BF,
The total #leaf-level entries = (BF)^k
The max. #records for 3 level index tree with BF = 108 is
(108)^3 = 1,259,712 records
Cont’
The access to the data requires:
( #access to the index) + ( 1 additional disk access
to the data file ) = (3 disk accesses to the index )
+ ( 1 to the data file) = 4 disk accesses.
This means over 1 M records can be searched by 4
disk accesses. If we assume that 1 disk access =
0.025 sec, 4 disk access = 0.1 sec + a few
calculations 0.1 seconds , Note that we used a
simplified method for estimating the access time
B Trees and B+ Trees as
Dynamic Multi-level Indexes
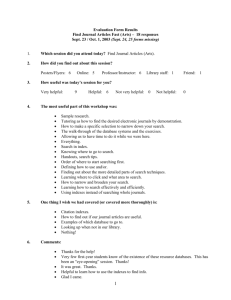
A tree data structure
• A node in a search tree of order P:
- Each node contain at most P-1 search values and P
pointers
- Two constraints:
1. Within each node, K1 <K2< .... < Kq-1
2. Subtree nodes has larger values than the LHS
search value and smaller values than the RHS search
value
- Example search tree of order P= 3
Cont’
• A tree is balanced if all of its leaf nodes are at the
same level
- Ensures that no nodes will be at very high
levels (many block accesses)
- Deletion may leave some nodes nearly
empty (storage waste)
• B Tree and B+ Tree structures are variations of
search trees that allow efficient insertion and
deletion of new search values
Cont’
• In B Tree and B+ Tree structures, each
node corresponds to a disk block (or a
disk block + offset)
• Each node is kept between half-full and
completely full
• An insertion into a node that is not full is
quite efficient; if a node is full, the insertion
causes a split into two nodes
Cont’
• Splitting may propagate to other tree
levels
• A deletion is quite efficient if a node does
not become less than half full
• If a deletion causes a node to become
less than half full, it must be merged with
neighboring nodes
B tree:
• B trees and its variations were designed to
reside on disk, partially memory resident (the
root node)
• It may contain an entry for every record
• In a B tree, pointers to data records exist at all
levels of the tree
• B tree insertion and deletion algorithm
guarantees that the tree will always be balanced
(performance vs. complexity).
B+ tree:
• In a B+ tree, all pointers to data records
exists only at the leaf-level nodes
• The leaf nodes have an entry for every
search value w/ a pointer to the record
• The leaf nodes of the B+ trees are usually
linked together to provide ordered access on
the search field
• Some search field values are repeated in
the internal nodes, Causes duplicate key
values and more maintenance cost
• Faster sequential processing
B* tree:
• A B+ tree whose nodes are at least twothirds filled
• Increase storage utilization and speed-up
in search
• Increase update cost (node full occurs
more frequently)
• Used in Oracle
Discussion:
• Most systems allow users to choose a fill factor b/n 0.5 to 1
• The PK constraint is enforced by creating an index for the
primary key
• A fully inverted file is a file with a secondary index for every
field
• The most popular index organization is B trees or B+ trees
• An ordered file with multi-level primary index on its ordering
key field is called an Indexed Sequential File
Cont’
• IBM's ISAM (Indexed Sequential Access Method)
has a 2-level index:
- Cylinder index (the key value of an anchor record
for each cylinder of a disk pack and a pointer to the
track index)
- Track index (the key value of an anchor record for
each track and a pointer to the track)
• IBM's VSAM (Virtual Storage Access Method) is
similar to B+ tree structure
Recommendation for Physical
Design
• Do not make physical design decisions too
soon.
• Do not tie the logical design to physical
constraints that may well change
• Optimize the physical design for top 20% of
queries and transaction types that are most
frequently executed.
Recommendation for Indexing
- Create indexes for PK, FK, CK, frequently-used attributes in
queries (i.e., name), The uniqueness of values (PK, CK)
- Do not create an index for FK which is not used for selection
condition. eg Student(SSN, Name, Grade, Bdate, Zip) and
ZIP(Zip, City, State): Find address of all seniors (don't create an
index for ZIP in Student) , Find all names living in Wayne
(create an index for ZIP in Student)
Cont’
• For multi-attribute indexes
.Attribute with most variety first (selectivity)
.If equal variety, attribute with most often accessed
first
.Weak entity: "main-attr+ minor-attr" such as
owner PK + partial key (In this case, do not create
another index on owner PK in the WE table)
. When two attributes frequently occur at the same
time in a query
. A composite index will be used only when the
leading column appears in WHERE clause.
Cont’
• Do not create indexes for attributes with small
#values
. Boolean value ----- poor choice, slow down
performance, (e.g., gender: each value will have
50% of table size; big overhead)
. Phone number ----- good choice
. Area code ---------- marginal
. Small tables (less than 30 or 100 records)
(Better left unindexed except to enforce uniqueness
in the PK)
. Small # of blocks: (less than 8 data blocks in Oracle)
Heuristics
. A frequent retrieval with less than 1% retrieval is a
good candidate.
. A frequent retrieval with 1-5% retrieval should be
considered.
. An occasional retrieval with over 2% retrieval is not
a good choice.
. The more static a file, the more attractive
. The larger the record, the greater the value of
indexing
. Don't create more than 3 indexes for a volatile file in
general
. Create as many indexes as needed for static files
When to create indexes
• When the table is initially loaded with data
• This method will create the index much faster
for the sort algorithm will sort all the index
values at once and then insert them into a B*
tree.
NULL and Indexes
.Columns that are NULL will not appear in an index
(Except in cluster index)
. Indexes with more than one column will have an
entry if any of the columns are not NULL
. Since an index does not include NULL value, some
queries will be faster to run if you leave a numeric
column NULL, rather than zero
SELECT Name, Commission
FROM
Commission
WHERE
Commission > 0;
Guidelines for Not Using Indexes
- If the index is never used by the optimizer
- If more than 10-20% of the rows are to be
retrieved
- If the column contains only one, two or three
unique values.
- If the column to be indexed is too long (more
than 20 bytes)
- If the overhead of maintaining the index is
greater than the benefit.
LOGICAL STRUCTURES
Schema Objects:
Base table, view, sequences, indexes,
clusters, database links, synonyms,
procedures, packages
LOGICAL STORAGE UNITS
TableSpaces
- A tablespace is a logical data organization unit
that contains one or more db objects (DD,
tables, indexes, or clusters).
- A db consists of one or more tablespaces.
- Every db has at least one tablespace: SYSTEM
that holds the DDs, the names and locations of
all the tablespaces, tables, indexes, and
clusters for this db
- Physically, a tablespace has one or more data
files.
Cont’
Example
• CREATE TABLESPACE talbot DATAFILE
'HOME.ONE‘ SIZE 1000K DEFAULT
STORAGE (INITIAL 25K NEXT 10K
MINEXTENTS 1 MAXEXTENTS 100
PCTINCREASE 50);
• /* Declaring a table within a tablespace */
• CREATE TABLE ledger (ActionDate
DATE, ........)
TABLESPACE talbot;
Segments
A segment is a logical storage space for a
db object.
- A tabelspace contains many segments.
- Types of segments in Oracle:
Table, Index, Rollback, Temporary, Partition,
Cluster
Extents
- A segment consists of one or many extents.
- An extent is a set of contiguous data blocks
used to store a particular type of information.
- Each segment has an initial disk space set aside
called the initial extent.
- The server allocates an additional extent to a
segment whose space is full.
- Extents cannot span datafiles.
Blocks
• A block is the smallest logical (also physical) unit of
storage.
Several blocks comprise an extent.
• A block contains:
. fixed block header (block address, segment type, the
table and rows that use the block, etc about 113 bytes.),
. variable block header
. table directory (stores info about the tables in the cluster)
. the actual data with 2 bytes of row overhead, and
. free space (PCTFREE): percent of the block space
reserved for update
- DB_FILE_MULTIBLOCK_READ_COUNT in INIT.ORA
shows the #of multi-blocks that can be read into buffer
cache by a single read request during full table scan.
Controlling Space Usage at
BLOCK Level
- Identifying the block size:
SQLDBA> SHOW PARAMETERS
db_block_size;
SQL> SELECT SEGMENT_NAME,
BYTES, BLOCKS, BYTES/BLOCKS
Block_Size
FROM USER_SEGMENT;
Cont’
- Computing the number of blocks
ANALYZE TABLE mytable COMPUTE
STATISTICS;
SELECT BLOCKS FROM USER_TABLES
WHERE Table_Name = ‘MYTABLE’;
- CREATE TABLE product ( ....... ) TABLESPACE users
PCTFREE 20 PCTUSED
60
STOARGE (INITIAL 10M NEXT 5K
PCTINCREASE 0);
- PCTFREE Parameter
. "Percent free" means what percentage of a block to keep free for
changes to rows in the block
. The purpose of PCTFREE is to minimize disk I/O by reducing row
chaining and row migration
. Row migration: moving an entire row to a new block after an update
of a row (VARCHAR2 or NULL): occurs when PCTFREE is too
small.
. Row chaining: the splitting of a row across multiple blocks (LONG
or LONG RAW)
. The default = 10
. Used for both tables and indexes.
Cont’
PCTFREE and Tables
. The free space must be large enough to
handle updates.
. Lower PCTFREE can cause row
migration.
. The more volatile your data, the larger
PCTFREE should be.
. For tables with no updates, PCTFREE
should be zero.
PCTFREE and Indexes
. Specifies the free space that should be
left within the leaf blocks
Example: Employee index on last_name
If we have 10,000 employees and expect
2000 more, PCTFREE might be 25
This avoids the split of index leaf blocks.
If we build an index whose index key is
higher than all current values, PCTFREE
could be zero
DISPLAYING STORAGE
INFORMATION with DD VIEWS
• USER_EXTENT
Extents of segments belonging to the user
• USER_FREE_SPACE
Free extents in a tablespace accessible to the user
• USER_SEGMENTS
Storage allocation for segments belonging to the user
• USER_TABLESPACES
Description of accessible tablespaces
• USER_USERS
Information about the current user
• USER_TS_QUOTAS
Tablespace quotas for the user
PCTUSED Parameter
. When the percentage of a data block falls down to the
value of PCTUSED, the block becomes available for
inserts
. Used only for tables, not for indexes.
. The default value of PCTUSED = 40
. The higher the PCTUSED, the fuller the data block
. The smaller the gap between PCTUSED and PCTFREE,
the more number of blocks on the free list even if none
of them have enough space to accommodate most
inserts.
. To avoid the bottleneck, leave some slack space b/n
PCTFREE and PCTUSED
Indexing in Oracle
• There are some differences between indexing theory
we discussed in this chapter and those implemented
in Oracle.
• Oracle does not have Primary index as we discussed.
The index created by the primary key clause is a
dense secondary index. The reason is Oracle does
not sort the rows based on the value of primary key
even though you create the primary key. Rows are
just appended as you insert into a table.
Oracle automatically creates a dense secondary
index when PRIMARY KEY or UNIQUE
clause is used:
. CREATE TABLE employee (SSN CHAR(9)
PRIMARY KEY ……..);
. ALTER TABLE employee ADD
CONSTRAINT emp_PK PRIMARY KEY
(SSN).
- If you drop the primary key, the unique index
is automatically dropped.
- However, if you sort the data by the primary
key using CTAS (CREATE TABLE xyz AS
SELECT …..), the index on the primary key
will be a primary index as discussed in the
book. Note that a primary index will speed
up your query processing based on the
primary key.
- Indexes in Oracle are stored in a B* tree with doublylinked leaf blocks.
- An index may have max. 16 column values in a
composite index.
- Hashing is supported only in the clustering tables.
- Recent version of Oracle also supports Bitmap indexes
for OLAP or data warehousing applications. Bitmap
indexes are only for low-cardinality attributes (that has
a small number of unique values) such as SEX,
REGION, STATE, or CODE-like attributes.
Index Usage
- Indexes speed up query processing on larger tables, but
could cause overhead for volatile files
- Small tables ( |rows| <1000 or less than 8 blocks) may
not be beneficial with indexes
- Users do not have to specify indexes in queries
- Indexes are typically automatically used when mentioned in
WHERE clause
- Indexes are stored in data dictionary called
USER_INDEXES (IND).
- Indexes are automatically updated when the table is updated
- - Indexes are stored in data dictionary called
USER_INDEXES (IND)
- - Indexes can be created for any data type except LONG
When Indexes are Ignored?
When there is no WHERE clause
When WHERE clause contains IS NOT
NULL or IS NULL
When the comparison is <> (or !=)
-
When an indexed column is modified by a
function such as SUBSTR or ||
Storage Allocation in Oracle
- Oracle only allocates whole blocks, not parts of
blocks
- Oracle allocates sets of blocks, usually I multiple of
five blocks
- Oracle may allocate larger or smaller sets of blocks
depending on the available free space in the
tablespace.
- Oracle uses 7 bytes for a DATE values and 3 bytes
for a NUMBER. IN storage estimation, use 8 bytes
for a DATE and 4 bytes for a NUMBER including
column overhead.
INDEX Command in Oracle
CREATE [UNIQUE | BITMAP] INDEX indexname ON { table-name (attribute [ASC |
DESC] list) | CLUSTER cluster_name }
[TABLESPACE <tablespace>]
[ INITRANS <integer> ]
[ MAXTRANS <integer> ]
[ PCTFREE <integer> ]
[PCTUSED <integer>]
[STORAGE <storage clause>]
[ ASC | DESC ]
- ASC and DESC means ascending and descending
- This is only for DB2 compatibility, but has no effect
- Indexes in Oracle are always ascending
[ TABLESPACE ]
- Specifies the table space in which the index is created
- Store the table and index in different tablespaces
- This allow concurrent access to the table and the index
[ INITRANS ]
- Number of transaction entries allocated to each block of the index
- [Every transaction that modifies the block requires a transaction
entry]
- The minimum and default value is 2.
- 23 * INITRANS bytes are used as a block header.
[ MAXTRANS ]
- Max. number of transaction entries allocated to each block of the index
- Max number of concurrent transactions that can update an index block
- Max and default is 255.
[ PCTFREE value1 ]
- The percentage of free space left for updates on the index page
- The default value is 10 (i.e., each index page is 90% full)
- Use higher value for a volatile file
- Use a lower value for a stable file
[ PCTUSED ]
- The percentage of a block that Oracle attempts to fill before it allocates
another block.
- The default is 40.
[ STORAGE ] clause
- If the index will occupy less than 25 blocks, then one extent for the
segment will be allocated
[Extents are contiguous blocks]
- INITIAL
-- First extent in bytes. K or M can be used
-- The default value is 5 data blocks. Minimum is 2.
- NEXT
-- The size of the next extent that will be allocated to the
index.
- PCTINCREASE
-- The percent by which each extent grows over the
previous extent.
- MINEXTENTS
-- The total number of extents that are created when a
segment is created
[One segment corresponds to database objects]
- MAXEXTENTS
-- The total number of extents that can be created for the
segment.
EXAMPLE:
CUST (Cust_num, Fname, Lname, Address,
City, State, Zip, Phone)
• Creating an index on a single attribute
CREATE INDEX Cust_Lname_IDX ON Cust
(Lname);
/* Cust_Lname_IDX is a user-defined index file
name */
/* Index name can be up to 30 char long */
/* Good naming convention:
TableName_AttributeName */
/* Oracle creates a B* tree index using Lname. */
Creating an index on multi-attribues
CREATE INDEX Cust_Lname_Zip_IDX ON Cust
(Cname, Zip ASC);
/* You can have up to 16 attributes in one index */
/* You can have columns in only one table */
/* Entries must not exceed 1/3 of the data block size */
/* Put the most restrictive column first */
/* Put the most frequently queried column first */
Creating a unique index to enforce a unique constraint
CREATE UNIQUE INDEX Cust_num_IDX ON Cust
(Cust_Num);
/* Declaring an attribute as PRIMARY KEY or UNIQUE
automatically
create a unique index */
Creating an index with parameters
CREATE INDEX Cust_Lname_IDX ON Cust (Lname)
TABLESPACE cust_data_space
PCTFREE 20
PCTUSED 50
STORAGE ( INITIAL
5K
NEXT
5K
MINEXTENTS
1
MAXEXTENTS
50
PCTINCREASE
0);
Dropping an index
DROP INDEX Cust_Lname_Zip_IDX;