Document
advertisement

Signals and Systems
Fall 2003
Lecture #19
18 November 2003
1. CT System Function Properties
2. System Function Algebra and
Block Diagrams
3. Unilateral Laplace Transform and
Applications
CT System Function Properties
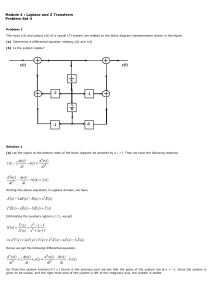
x(t)
h(t)
y(t)
Y ( s) H ( s) X ( s)
1) System is stable
h(t ) dt
H(s) = “system function”
ROC of H(s) includes jω axis
2) Causality => h(t) right-sided signal => ROC of H(s) is a right-half plane
Question:
If the ROC of H(s) is a right-half plane, is the system causal?
E.x.
e eT
H ( s)
, e{e} 1 h(t ) right - sided
s 1
e eT
1
1
h (t ) L
e t u(t ) |t t T
L
s 1 t t T
s 1
Non-causal
e ( t T ) u(t T ) 0 at t 0
1
Properties of CT Rational System Functions
a)
However, if H(s) is rational, then
The system is causal
b)
⇔ The ROC of H(s) is to the
right of the rightmost pole
If H(s) is rational and is the system function of a causal
system, then
The system is stable
⇔
jω-axis is in ROC
⇔ all poles are in
Checking if All Poles Are In the Left-Half Plane
N ( s)
H ( s)
D( s )
Poles are the root of D(s)=sn+an-1sn-1+…+a1s+a0
Method #1: Calculate all the roots and see!
Method #2: Routh-Hurwitz – Without having to solve for roots.
Polynomial
First - order
s a0
Second - order
s 2 a1 s a0
Third - order
s 3 a 2 s 2 a1 s a0
Condition so that all
roots are in the LHP
a0 0
a1 0, a0 0
a 2 0, a1 0, a0 0
and a0 a1a 2
Initial- and Final-Value Theorems
If x(t) = 0 for t < 0 and there are no impulses or higher order
discontinuities at the origin, then
x(0 ) lim sX ( s)
Initial value
s
If x(t) = 0 for t < 0 and x(t) has a finite limit as t → ∞, then
x ( ) lim sX ( s )
s 0
Final value
Applications of the Initial- and Final-Value Theorem
X ( s)
For
n-order of polynomial N(s),
•
N ( s)
D( s)
d – order of polynomial D(s)
Initial value:
d n 1
0
x (0 ) lim sX ( s ) finite 0 d n 1
s
d n 1
E.g.
•
X ( s)
1
s 1
x (0 ) ?
Final value:
If x() lim sX ( s) 0 lim X ( s)
s 0
No poles at s 0
s 0
LTI Systems Described by LCCDEs
d k y (t ) M d k x (t )
ak
bk
k
dt
dt k
k 0
k 0
N
d
dk
k
Repeated use of differenti ation property : s,
s
dt
dt k
N
M
a s Y ( s) b s
k
k 0
k
k 0
k
k
X ( s)
Y ( s) H ( s) X ( s)
bs
where H ( s )
s
a
M
k
k 0 k
N
roots of numerator ⇒ zeros
k
roots of denominator ⇒ poles
k 0
k
Rational
ROC =?
Depends on: 1) Locations of all poles.
2) Boundary conditions, i.e.
right-, left-, two-sided signals.
System Function Algebra
Example:
A basic feedback system consisting of causal blocks
E( s) X ( s) Z ( s) X ( s) H 2 ( s)Y ( s)
Y ( s) H1 ( s)E( s) H1 ( s)X ( s) H 2 ( s)Y ( s)
H ( s)
ROC:
H1 ( s)
Y ( s)
X ( s) 1 H1 ( s) H 2 ( s)
More on this later
in feedback
Determined by the roots of 1+H1(s)H2(s), instead of H1(s)
Block Diagram for Causal LTI Systems with Rational
System Functions
Example:
Y ( s) H ( s) X ( s)
— Can be viewed
1
2
2s 2 4s 6
2
( 2 s 4 s 6)
H ( s) 2
as cascade of
s
3
s
2
s 3s 2
two systems.
1
Define :
W ( s) 2
X ( s)
s 3s 2
d 2 w(t )
dw(t )
3
2 w(t ) x (t ), initially at rest
2
dt
dt
d 2 w(t )
dw(t )
or
x (t ) 3
2 w(t )
2
dt
dt
Similarly
Y ( s ) ( 2 s 2 4 s 6)W ( s )
d 2 w(t )
dw(t )
y (t ) 2
4
6w(t )
2
dt
dt
Example (continued)
H ( s)
Instead of
x (t )
s
2
1
3s 2
2s
2
4s 6
y (t )
2
We can construct H(s) using: d w(t ) x (t ) 3 dw(t ) 2 w(t )
2
dt
dt
d 2 w(t )
dw(t )
y (t ) 2
4
6w(t )
2
dt
dt
Notation:
1/s—an integrator
Note also that
H ( s)
PFE
2(s 1 ) s 3 s 3 2( s 1)
s 2 s 1 s 2 s 1
2
6
8
s 2 s 1
Cascade
parallel connection
Lesson to be learned:There are many different ways to construct a
system that performs a certain function.
The Unilateral Laplace Transform
(The preferred tool to analyze causal CT systems
described by LCCDEs with initial conditions)
Note:
X (s)
1) If x(t) = 0 for t < 0,
0
x (t )e st dt ULx (t )
X ( s) X ( s)
2) Unilateral LT of x(t) = Bilateral LT of x(t)u(t-)
3) For example, if h(t) is the impulse response of a causal LTI
system then,
H ( s) H ( s)
4) Convolution property: If x1(t) = x2(t) = 0 for t < 0,
ULx1 (t ) x2 (t ) X1 ( x)X2 ( s)
Same as Bilateral Laplace transform
Differentiation Property for Unilateral Laplace Transform
x (t )
X ( s)
Initial condition!
dx (t )
sX ( s ) x (0 )
dt
integration by parts
∫f.dg=fg-∫g.df
Derivation:
dx (t )
UL
dt
dx (t ) st
e dt
0
dt
s x (t )e st dt x (t )e st |
0
0
X (s)
sX ( s) x(0 )
Note:
d 2 x(t ) d dx(t )
dt 2
dt dt
dx(t )
UL
dt
s( sX ( s ) x(0 )) x' (0 )
s X ( s) sx(0 ) x' (0 )
2
Use of ULTs to Solve Differentiation Equations
with Initial Conditions
Example:
d 2 y (t )
dy (t )
3
2 y (t ) x (t )
2
dt
dt
y (0 ) , y ' (0 ) , x (t ) u(t )
2
( s ) s 3(Y( s ) ) 2Y( s )
Take ULT: sY
s
2
d y
UL 2
dt
Y( s )
dy
UL
dt
( s 3)
(s
1
)( s
2
)
(s
1
)( s
2)
s( s
)(
s
2)
1
ZIR
ZSR
ZIR — Response for
zero input x(t)=0
ZSR — Response for zero state,
β=γ=0, initially at rest
Example (continued)
• Response for LTI system initially at rest (β = γ = 0 )
Y( s )
1
H ( s)
H ( s)
( s ) ( s 1)( s 2)
• Response to initial conditions alone (α = 0).
example:
x(t ) 0( no input ),
y(0 ) 1,
For
y ' (0 ) 0
( 1, 0)
s3
2
1
Y( s )
( s 1)( s 2) s 1 s 2
y ( t ) 2e t e 2 t ,
t0