EE-210. Signals and Systems Homework 7 Solutions
advertisement

EE-210. Signals and Systems
Homework 7 Solutions∗
Spring 2010
Exercise Due Date
11th May.
Problems
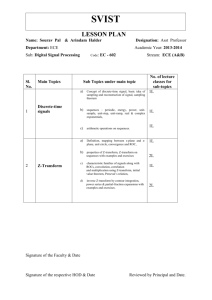
Q1 Let H1 be the causal system described by the difference equation
w[n] =
7
1
1
w[n − 1] − w[n − 2] + x[n − 1] − x[n − 2]
12
12
2
y[n]
w[n]
x[n]
H2
H1
Figure 1: Q1
(a) Determine the system H2 Fig. 1 so that y[n] = x[n]. Is the inverse system H2 causal?
Solution H2 (z) =
1
H1 (z) .
Not causal.
(b) Determine the system H2 Fig. 1 so that y[n] = x[n − 1]. Is the inverse system H2
causal?
Solution H2 (z) =
z −1
H1 (z) .
Causal.
(c) Determine the difference equation for system H2 in part (a) and (b)
1
7
1
Solution i. y[n] = y[n − 1] + w[n + 1] − w[n] + w[n − 1]
2
12
12
1
7
1
ii. y[n] = y[n − 1] + w[n] − w[n − 1] + w[n − 2]
2
12
12
Q2 Let y(k) = sin (ωkT ), determine a so that y satisfies the difference equation
y(k) − ay(k − 1) + y(k − 2) = 0
∗ LUMS
School of Science & Engineering, Lahore, Pakistan.
1
Solution if ω = 0 and/or T = 0, a can take any value. Otherwise, consider the characteristic
equation.
r
r
a
a2
a
a2
2
z − az + 1 =⇒ z = ±
−1= ±j 1−
= e±jωT = cos ωT ± j sin ωT
2
4
2
4
We get
a = 2cosωT
Q3 (a) Determine the circular convolution between x[n] = {b
1, 1, 0, 0} and y[n] = {b
1, 1, 1, 1}
for N=4. Where α
b represents the value of signal at n = 0 Verify the result by using
4-point DFT and IDFT.
Solution r[n] = {b
2, 2, 2, 2}
(b) If you want to calculate the linear convolution of x[n] = {1, 1} and y[n] = {1, 1, 1}
using the fast Fourier transform (FFT). What is required minimum number of data
points N in the FFT calculation?
Solution N=4
Q4 Determine all possible signals x[n] and corresponding ROC associated with the two-sided
z-transform
5z −1
X(z) =
−1
(1 − 2z )(3 − z −1 )
Solution Partial fraction expansion gives
X(z) =
5z −1
1
−1
=
+
(1 − 2z −1 )(3 − z −1 )
1 − 2z −1 1 − 13 z −1
| {z } | {z }
X1 (z)
X2 (z)
X1 (z) ⇒
x11 = 2n u(n), ROC11 = |z| > 2,
x12 = −2n u(−n − 1), ROC12 = |z| < 2,
X2 (z) ⇒
1
1
x21 = −( )n u(n), ROC21 = |z| > ,
3
3
1 n
1
x21 = ( ) u(−n − 1), ROC22 = |z| < ,
3
3
x[n] is given by
ROC = ROC1i ∩ ROC2j
x[n] = x1i [n] + x2j [n],
Combinations with non-empty ROC are:
x[n] = [2n − (1/3)n ]u[n], ROC = |z| > 2,
x[n] = −2n u[−n − 1] − (1/3)n u[n], ROC = 1/3 < |z| < 2,
x[n] = [−2n + (1/3)n ]u[−n − 1], ROC = |z| < 1/3.
2
Q5 (a) The transfer function of a filter is
H(z) =
1
z+4
and is valid of |z| < 4. Is the filter
i. causal? - NO
ii. stable? - YES
(b) Find the stable impulse response of a system with the transfer function
1
(z − 4)(z − 0.1)
H(z) =
Also, calculate the ROC where the expression is valid.
Solution
1
10 1
1
=
[
−
]
(z − 4)(z − 0.1)
39 z − 4 z − 0.1
10 −1/4
z −1
=
[
−
]
39 1 − z/4 1 − 0.1z −1
∞
∞
10 X
10 −1 X
k
=−
(z/4) − z
(0.1z −1 )k
156
39
H(z) =
k=0
=−
But H(z)=
P∞
k=−∞
10
156
k=0
0
X
∞
(4)k z −k −
k=−∞
100 X
(0.1)k z −k
39
h[k]z −k , therefore
−(10/156)4k
h[k] =
−(100/39)0.1k
k=1
k≤0
k>0
Region of Convergence: 0.1 < |z| < 4
Q6 Let x[n] and y[n] be two sequences with
x[n] = 0
y[n] = 0
f or n < 0, n ≥ 8
f or n < 0, n ≥ 20
A 20-point DFT is performed on x[n] and y[n]. The two DFT’s are multiplied and an
inverse DFT is performed resulting in new sequence r[n].
(a) Which elements of r[n] correspond to a linear convolution of x[n] and y[n]?
Solution The elements r[n], n = 0, . . . , 6 will be incorrect. The elements r[n], n = 7, . . . , 19 will
be correct
(b) How should the procedure be changed so that all elements of r[n] correspond to linear
convolution of x[n] and y[n]?
3
Solution The error is caused by the 7 last values of y. This issue can be resolved by increasing
the length of the sequences and the length of the DFTs to 27 by adding zeros.
Q7 A signal is fed to a system that down-sample the input signal by factor D. The input and
output are related by the equation
d x[D], x[2D], x[3D], x[4D], . . .} = x[nD] n = 0, ±1, ±2, ±3, . . .
y[n] = {. . . , x[0],
(a) Find the DTFT of y[n]
Solution First, define the signal
x
e[k] =
x[n] n = 0, ±D, ±2D
0 otherwise
which contains only the samples that will be left in the downsampled signal. Then,
∞
X
Y (f ) =
y(m)e−j2πf m
m=−∞
where,
x
e[k] = y(m) if n = Dm
x
e[k] = 0 otherwise
Y (f ) =
∞
X
e f)
x
e[n]e−j2πf n/D = X(
D
m=−∞
e
In order to find an expression for X(f),
define the selection function
1 n = 0, ±D, ±2D
s[n] =
0 otherwise
and note that s[n] can be written in the form
s[n] =
D−1
1 X j2πkn/D
e
D
k=0
4
(1)
Since x
e[n] = s[n]x[n], we get
∞
X
e )=
X(f
=
x
e[n]e−j2πnf
n=−∞
∞
X
s[n]x[n]e−j2πnf
n=−∞
=
∞ D−1
1 X X j2πkn/D
e
x[n]e−j2πf n
D n=−∞ n=0
=
D−1 ∞
1 X X
x[n]e−j2πn(f −k/D)
D n=0 n=−∞
=
D−1
1 X
k
X(f − )
D n=0
D
(2)
Putting eq. 2 in eq. 1
D−1
1 X
f −k
Y (f ) =
X(
)
D n=0
D
(b) Find the z-transform of y[n]
Solution
Y (f ) =
D−1
1 X
X(z 1/D e−j2πk/D )
D n=0
(c) By removing samples in down-sampling, some information is lost. This loss of information will lead to aliasing problems. Find H(f ) so that aliasing can be avoided.
y[n]
x[n]
↓D
H(f )
Figure 2: Q8
Solution
H(f ) =
1 , |f | = 1/2D
0 , 1/2D < |f | ≤ 1/2
=⇒
Y (f ) =
HINT DTFT: X(f ) =
P∞
n=−∞
1
f
1
X( ) |f | ≤
D
D
2
x[n]e−j2πf n
5
y[n]
x[m]
H(f )
↑U
↓D
Figure 3: Q8
Q8 Consider the system in Fig. 8. If U and D are prime integers, find H(f ) so that aliasing
can be avoided. Also find Y (f ).
Solution
H(f ) =
1
1
, 2D
]
U , |f | ≤ min [ 2U
1
1
0 , min [ 2U , 2D ] < |f | ≤
1
2
=⇒
Y (f ) =
U
U
D X(f D )
0
D
, |f | ≤ min [ 12 , 2U
]
, otherwise
Q9 If the filter h[n] = {1,0,0,5,0,0,3}, find g[n] such that both systems in Fig. 9 produce the
same output.
y[m]
x[n]
h[n]
↑2
↓3
↑2
↓3
g[n]
y[m]
x[n]
Figure 4: Q9
Solution H(z)=1 + 5z −3 + 3z −6 . The equivalent diagram is
y[n]
x[m]
f [n]
↑2
↓3
for first system to be equivalent to this system,
F (z) = H(z 2 ) = 1 + 5z −6 + 3z −12
similarly the second system is equivalent to this system if,
G(z 3 ) = F (z) ⇒ G(z) = 1 + 5z −2 + 3z −4 ⇒ g[n] = {1, 0, 5, 0, 3}
Note that it is impossible to make the two systems equivalent if, for example, h[n] =
{1, 0, 3, 4}
6