lab report - Joel M. Ham
advertisement

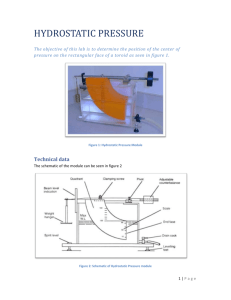
BSEN 3310 Hydrostatic Pressure Joel Ham Abstract: Hydrostatic pressure is the pressure exerted on a submerged surface by water that is not moving. This pressure and its relationships with water depth, force exerted, and mass supported can be studied using an Edibon Hydrostatics pressure system. The relationships can be explored through the three equations for a partially submerged surface, which are as follows: 𝑚= 𝜌𝑏 𝑦 (𝑎 + 𝑑 − )𝑦 2 2𝐿 3 ℎ𝑝 = 𝑎 + 𝑑 − ℎ 3 1 𝐹 = 𝜌𝑔ℎ2 𝑏 2 Where m is the mass applied to the system, ℎ𝑝 is the height of pressure applied to the surface, and F is the hydrostatic force on the surface. These equations are useful in analyzing pressure and how it is applied. These equations are backed up based on data recorded from observing a hydrostatic pressure system. Introduction: The study of hydrostatic pressure is very important in biological systems, particularly in those involving drainage and irrigation. Knowing the pressure involved in a system is very important in determining how to build that system and what materials to use. Applications such as center-ofpressure gates in irrigation systems rely heavily on information related to hydrostatic pressure. Such gates operate under the laws relating to hydrostatic pressure (Humpherys, 1991). Using equations relating to hydrostatic pressure can aid in future design of systems, and save time from manually measuring every property of a system. Objectives: The objectives were to determine the center of pressure and the force on a vertical surface when the surface is both partially and fully submerged in stationary water in a tank. Materials and Methods: An Edibon Hydrostatics Pressure System and small weights were used to measure height of water on the surface and force pushing against the surface. The tests began with ensuring that the water surface was level with the bottom of the device. Weights were added in varying increments. Each time a weight was added, water was also added to the tank to make the balance arm level. The mass and the corresponding water level were recorded for the partially submerged surface. Masses were added until the water level approached 0.1 meters. The highest reading recorded was 0.094 meters. To measure forces for when the surface was fully submerged, 0.22 kilograms was added to the end of the balance arm. Weight was again added in varying increments. Water was added each time to bring the surface back to 90 degrees with the bottom of the tank. The masses and corresponding heights were recorded. The following are the equations used in the experiment for when the surface was partially submerged in water: 𝑚= 𝜌𝑏 (𝑎 2𝐿 𝑦 + 𝑑 − 3 )𝑦 2 (1) ℎ ℎ𝑝 = 𝑎 + 𝑑 − 3 (2) 1 2 𝐹 = 𝜌𝑔ℎ2 𝑏 (3) If: m = mass on the end of the balance arm ρ = density of water, kg/m3 b = width of the surface, m L = length of the balance arm, m a = distance from the top of the surface to the top of the device, m d = height of the surface, m y = calculated height of the water from the bottom of the surface, m h = measured height of the water from the bottom of the surface, m g = acceleration due to gravity, m/s2 ℎ𝑝 = height of applied pressure from the bottom of the surface, m Equation (2) was derived first, based on the fact that the pressure applied under water has a triangular pressure profile. Pressure in a fluid increases with depth because there is more fluid at deeper layers. The effect of the extra weight on a deeper layer is shown by a pressure increase (Cengel et al, 2014). The applied pressure is 1/3 of the height of the triangle from the bottom of the triangle. The sum (a+d) is the distance from the top of the device to the bottom. (h/3) is the distance from the bottom of the device to the point of pressure. Therefore (a + d – h/3) is the height of pressure given from the top of the device. Equation (3) was derived next, using 𝑝𝑐 = pressure at the centroid, 𝐴𝑠 = area of submerged surface, and F = applied hydrostatic force on the surface. The following relationship is determined: 𝐹 = 𝑝𝑐 ∗ 𝐴𝑠 = 𝜌𝑔ℎ𝑐 𝐴𝑠 , where ℎ𝑐 = 1 ℎ 2 = height of centroid of the submerged surface, and 𝐴𝑠 = ℎ ∗ 𝑏. Using this information, equation (3) can be found: 1 𝐹 = 2 𝜌𝑔ℎ2 𝑏 , where b is the width of the surface Finally, equation (1) was developed by using the relationship between mass on the end of the balance arm and hydrostatic force (F). The moment created by these two forces about the balance point (above the partially submerged surface on the balance arm) is equal to zero. The moment equation is as follows: 𝛴𝑀 = 0 −𝐹(ℎ𝑝 ) + 𝑚𝑔𝐿 = 0 𝑚𝑔 = 𝐹ℎ𝑝 𝐿 Using y = h and the information from equation (3), this progression can be followed: 𝑚𝑔 = 𝐹ℎ𝑝 1 𝑦 = 𝜌𝑔𝑦 2 𝑏 (𝑎 + 𝑑 − ) 𝐿 2𝐿 3 Cancelling g from both sides results in equation (1) 𝑚= 𝜌𝑏 𝑦 (𝑎 + 𝑑 − )𝑦 2 2𝐿 3 A similar method was used to develop equations (4), (5), and (6) for the fully submerged surface: (1) 𝑚 = 𝜌𝑏𝑑 (𝑎 𝐿 +𝑑+ 𝑑2 )𝑟 12𝑟 Where 𝑟 = 𝑦 − 0.5𝑑 𝑑 2 (2) ℎ𝑝 = 𝑎 + + 𝑑2 𝑑 2 12(ℎ− ) 𝑑 (3) 𝐹 = 𝜌𝑔𝑏 (ℎ − 2 ) 𝑑 Figure 1 gives a visual representation of variables and dimensions and where they come from. Figure 1: Diagram of an Edibon Hydrostatics pressure system Results: Figure 2 contains the relationship between the mass added to the end of the balance arm and the calculated height of the water. The relationship follows a polynomial trend line due to the (𝑦 + 𝑧)𝑦 2 relationship in the equation relating mass and calculated height. A greater change in mass is required to raise the height the same amount as mass increases. 0.25 Mass (kg) 0.2 y = 18.94x2 + 0.1734x R² = 0.9997 0.15 0.1 0.05 0 0 0.02 0.04 0.06 0.08 0.1 0.12 Calculated height (m) Figure 2: Mass on balance arm versus calculated height for a partially submerged surface Figure 3 shows the relationship between the calculated height of the water and the measured height of the water based on mass added to the end of the balance arm. Since calculated height (y) and measured height (h) should be the same for each measurement, the graph follows a linear trend line whose slope is close to 1. The slope of 1.033 shows a possible error in exactness of measured readings or the balance arm not being perfectly level. 0.12 Calculated height (m) 0.1 0.08 y = 1.033x R² = 0.9962 0.06 0.04 0.02 0 0 0.02 0.04 0.06 0.08 0.1 Measured height (m) Figure 3: Calculated height versus measured height for the partially submerged surface Figure 4 shows the relationship between the height of the pressure point on the surface and the observed height of the water level. The slope is negative because h and ℎ𝑝 are measured in opposite directions. The slope of the trend line (-0.333) comes from the relationship given in the equation ℎ𝑝 = −1 ℎ. 3 The relationship is linear because there are no exponents in the equation. 0.2 Height of Pressure (m) 0.195 0.19 y = -0.3333x + 0.2 R² = 1 0.185 0.18 0.175 0.17 0.165 0 0.02 0.04 0.06 0.08 0.1 Measured height (m) Figure 4: Height of pressure versus measured height of water for the partially submerged surface Figure 5 shows the relationship between the hydrostatic force exerted on the surface and the height of the water on the surface. The trend line is exponential due to the ℎ2 value in the equation relating force and height. The measured height of water puts more force at a higher rate on the surface as the height of the water increases. 3.5 3 y = 343.35x2 - 6E-14x R² = 1 Force (N) 2.5 2 1.5 1 0.5 0 0 0.02 0.04 0.06 Measured Height (m) 0.08 0.1 Figure 5: Hydrostatic Force versus measured height of water for partially submerged surface Figure 6 shows how the standard deviation between measured height and calculated height vary as measured height of water increases. Standard deviation gets larger as measured height increases, most likely due to the larger margin for error that comes with higher readings. The outlying high value is due to a possible error in reading or an uneven level arm. Standard Deviation (y vs. h) 0.003 0.0025 0.002 0.0015 0.001 0.0005 0 0 0.02 0.04 0.06 0.08 0.1 Measured Height (m) Figure 6: Standard deviation between calculated height and measured height of water versus measured height of water for partially submerged surface Figure 7 shows the relationship between the mass added to the system and the calculated height of water from equation (4). As opposed to partially submerged, the relationship is linear due to the lack of an exponential value associated with the calculated height in equation (4). The calculated height increases at a constant rate in relation to mass added to the end of the level arm. 0.5 0.45 0.4 y = 3.6842x - 0.1637 R² = 1 Mass (kg) 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0 0.05 0.1 0.15 0.2 Calculated height (m) Figure 7: Mass on balance arm versus calculated height of water for fully submerged surface Figure 8 shows the relationship between calculated and observed height for a fully submerged surface. The trend line is linear and should have a slope of 1 because the observed height and the calculated height are theoretically the same. The slope of 1.0406 is accurate yet not perfect, most likely due to errors in height readings or a slightly unbalanced level arm at time of measurement. Calculated height of water (m) 0.18 0.16 y = 1.0406x R² = 1 0.14 0.12 0.1 0.08 0.06 0.04 0.02 0 0 0.05 0.1 0.15 0.2 Observed Height of water (m) Figure 8: Calculated height of water versus observed height of water for a fully submerged surface Figure 9 shows the relationship between the height of the pressure point from the top of the device on the surface and the observed height of water in the device. The relationship is exponential due to the h value in the denominator of the equation relating ℎ𝑝 and h. The downward trend is due to the fact that ℎ𝑝 and h are measured from opposite directions and as one increases, the other decreases. 0.168 Height of Pressure (m) 0.166 0.164 y = 0.1269x-0.117 R² = 0.9814 0.162 0.16 0.158 0.156 0 0.05 0.1 0.15 0.2 Observed Height (m) Figure 9: Height of pressure versus observed height of water for a fully submerged surface Figure 10 shows the relationship between the hydrostatic force exerted on fully submerged surface and the observed height of water in the system. The relationship is linear because in equation (6) there are no exponents connected to the h value. The hydrostatic force increases at a constant rate as measured height of water in the system increases. 8 Hydrostatic Force (N) 7 y = 68.67x - 3.4335 R² = 1 6 5 4 3 2 1 0 0 0.05 0.1 0.15 0.2 Measured Height (m) Figure 10: Hydrostatic force versus measured height of water on a fully submerged surface Figure 11 relates standard deviation between calculated and measured height and the measured height of water in the system. The standard deviation gradually grows as the measured height in the system increases, due to the larger margin for error with higher readings. Standard Deviation (calculated vs measured height) 0.005 0.0045 0.004 0.0035 0.003 0.0025 0.002 0.0015 0.001 0.0005 0 0 0.05 0.1 0.15 0.2 Measured Height (m) Figure 11: Standard deviation between calculated and measured height versus measured height Conclusions: The equations relating mass, height of pressure, and hydrostatic force are supported by information collected from the Edibon Hydrostatics pressure system. For partially and fully submerged surfaces, the measured height of the water and the calculated height of water are very closely to a 1:1 ratio, which supports equation (1). The height of water and the height of pressure are also linearly related, as height of pressure decreases as height of water increases. References: Cengel, Y.A., Cimbala, J.M. (2014). Fluid Mechanics, Fundamentals and Applications, Third Edition. New York, NY: McGraw Hill Humpherys, A.S. (1991). Center-of-Pressure Gates for Irrigation. 7(2): 185-192. (doi: 10.13031/2013.26209)