Homework 2
advertisement

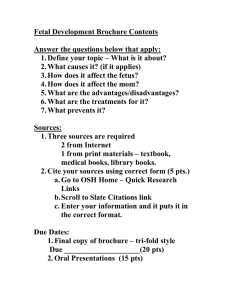
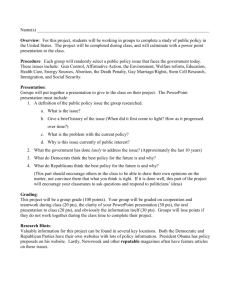
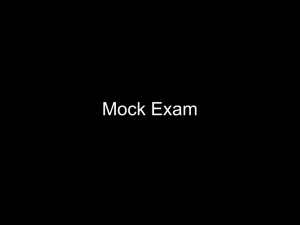
Homework 2: EE 4314, Control Systems, Fall 2013 Posted 09/17/13, Due 10/1/13 Instructions: The purpose of this homework is to let you practice concepts learned in class regarding system models, block diagrams, stability and response. . To receive full credit, please return handwritten or typed answers to me prior to the lecture on Sept. 17. Be as detailed in your answers as possible, and show the steps you followed in arriving at your answers (simply listing the correct answer does not mean you will receive full credit). In addition, MATLAB problems require you to print the code (*.m file), its ouput and associated plots. Finally, compile all such code, output and plots into a single document in Word format. Name the document 'FA2013_EE4314_Homework2_Lastname.doc’. If there is a need to send .m files or other relevant files, include them and the above mentioned word document in a .zip file 'FA2013_EE4314_Homework2_Lastname.zip'. Please email this file to the TA, suresh_sampathkumar@mavs.uta.edu. You are encouraged to consult with your classmates while you work on the homework, however, writing/coding and understanding final submissions must be your own work. Problem 1 (55 pts) (Dynamic Models) (i) Consider the mechanical system in Figure 1, the motorized cart-pendulum system. The cart has a moving mass M, and is connected to a rotating motor that drives an inverted pendulum. The mass M linear motion has a damping coefficient of B and a spring constant K. The pendulum of length l has negligible inertia and mass m, and is attached to the cart via a rotary servo motor that has motor constants Km and Ke, armature resistance Ra and inductance La. Assume that the pendulum damping coefficient is b, the linear actuator force is zero and the rotary actuator torque is driven by the dc servo motor torque generated by armature voltage ea(t). Your tasks are as follows: a) Write the dynamical equations of motion as a function of the states (15pts). b) Approximate the pendulum equations around θ=0, and find the transfer function between input ea and output θ (15 pts). c) Write a MATLAB simulation to animate the cart and pendulum response to a sine wave input from an initial conditions of x=0, θ=0. Assume reasonable values for simulation constants, and you may refer to : http://www.baldor.com/support/literature_load.asp?LitNumber=BR1202-F for the dc servo motor numerical specifications (indicate which motor you selected). (25 pts). Figure 1: The cart-pendulum system Problem 2 (15 pts) (Routh’s Criterion) (a) Using the Routh’s table find out how many poles of the following function are in the right half plane, in the left half plane, and on the 𝑗𝜔 axis 𝑠+8 𝑠 5 − 𝑠 4 + 4𝑠 3 − 4𝑠 2 + 3𝑠 − 2 (b) Using the Routh’s-Hurwitz criterion, find out how many closed loop poles of the system shown in the figure lie in the left half plane, in the left half plane, and on the 𝑗𝜔 axis T(s) = Problem 3 (15 pts) (Stability) (a) A linearized model of a torque controlled crane hoisting a load with a fixed rope length is 𝑋𝑇 (𝑠) 1 𝑠 2 + 𝑤02 𝑃(𝑠) = = 𝐹𝑇 (𝑠) 𝑚 𝑇 𝑠 2 (𝑠 2 + 𝑎𝑤02 ) 𝑔 where 𝑤0 = √ 𝐿 , 𝐿 = the rope length, 𝑚 𝑇 =the mass of the car, a = combined rope and car mass, 𝑓𝑇 = the force input applied to the car, and 𝑥𝑇 = the resulting rope displacement. If the system is controlled in a feedback configuration by placing it in a loop as shown in the figure below with K>0, where will the closed loop poles be located? (b) For the transfer function below, find the constraints on K1 and K2 such that the function will have only two 𝑗𝜔 poles Problem 4 (15 pts) (Transfer functions) A virtual reality simulator with haptic(sense of touch) feedback was developed to simulate the control of a submarine driven through a joystick input. Operator haptic feedback is provided through joystick position constraints and simulator movement. Figure below shows the block diagram of the haptic feedback system in which the input 𝑢ℎ is the force exerted by the muscle of the human arm; and the outputs are 𝑦𝑠 , the position of the simulator, and 𝑦𝑗 ,the position of the joystick. 𝑌 (𝑠) (a) Find the transfer function 𝑈𝑠 (𝑠). ℎ 𝑌𝑗 (𝑠) (b) Find the transfer function 𝑈 . ℎ (𝑠)