CHAP8-3
advertisement

Topics
•
Basics of register-transfer design:
– data paths and controllers;
– ASM charts.
•
Pipelining.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Register-transfer design
•
•
•
A register-transfer system is a sequential
machine.
Register-transfer design is structural—
complex combinations of state machines
may not be easily described solely by a
large state transition graph.
Register-transfer design concentrates on
functionality, not details of logic design.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
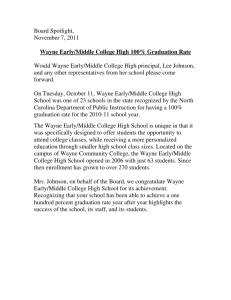
Register-transfer system example
A register-transfer machine has combinational
logic connecting registers:
Q D
combinational
logic
Modern VLSI Design 4e: Chapter 8
combinational
logic
D
Q
combinational
logic
D
Q
Copyright 2008 Wayne Wolf
Block diagrams
Block diagrams specify structure:
Modern VLSI Design 4e: Chapter 8
wire bundle
of width 5
Copyright 2008 Wayne Wolf
Register-transfer simulation
•
•
Simulates to clock-cycle accuracy. Doesn’t
guarantee timing.
Important to get proper function of
machine before jumping into detailed logic
design. (But be sure to take into account
critical delays when choosing registertransfer organization.)
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Simulation coding
•
Hardware description languages are
typically supported by a simulation
system: VHDL, Verilog, etc.
– Simulation engine takes care of scheduling
events during simulation.
•
Can hand-code a simulation in a
programming language.
– Must be sure that register-transfer events
happen in proper order.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Sample VHDL code
sync: process begin
wait until CLOCK’event and CLOCK=‘1’;
state <= state_next;
end process sync;
combin: process begin
case state is
when S0 =>
out1 <= a + c;
state_next <= S1;
...
end process combin;
Modern VLSI Design 4e: Chapter 8
sync process models
registers
combin process models
combinational logic
Copyright 2008 Wayne Wolf
Sample C simulator
while (TRUE) {
switch (state) {
case S0:
x = a + b;
state = S1;
next;
case S1:
...
}
}
Modern VLSI Design 4e: Chapter 8
loop executed once
per clock cycle
each case corresponds
to a state; sets outputs,
next state
Copyright 2008 Wayne Wolf
Data path-controller systems
•
One good way to structure a system is as a
data path and a controller:
– data path executes regular operations
(arithmetic, etc.), holds registers with dataoriented state;
– controller evaluates irregular functions, sets
control signals for data path.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Data and control are equivalent
•
We can rewrite control into data and visa
versa:
– control: if i1 = ‘0’ then o1 <= a; else o1 <=
b; end if;
– data: o1 <= ((i1 = ‘0’) and a) or ((i1 = ‘1’)
and b);
•
Data/control distinction is useful but not
fundamental.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Data operators
•
Arithmetic operations are easy to spot in
hardware description languages:
– x <= a + b;
•
•
Multiplexers are implied by conditionals.
Must evaluate entire program to determine
which sources of data for registers.
Multiplexers also come from sharing
adders, etc.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Conditionals and multiplexers
if x = ‘0’ then
reg1 <= a;
else
reg1 <= b;
end if;
code
register-transfer
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Alternate data path-controller
systems
controller
controller
data path
data path
one controller,
one data path
Modern VLSI Design 4e: Chapter 8
controller
data path
two communicating
data path-controller
systems
Copyright 2008 Wayne Wolf
ASM charts
•
•
•
An ASM chart is a register-transfer
description.
ASM charts let us describe function
without choosing a partitioning between
control and data.
Once we have specified the function, we
can refine it into a block diagram which
partitions data and control.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Sample ASM chart
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
ASM state
•
An ASM state specifies a machine state
and a set of actions in that state. All actions
occur in parallel.
s1
x=a+b
y=c-d+e
o1 = 1
name of state (notation only)
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Actions in state
•
•
•
Actions in a state are unconditionally
executed.
A state can execute as many actions as you
want, but you must eventually supply
hardware for all those actions.
A register may be assigned to only once in
a state (single-assignment rule).
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Implementing operations in an
ASM state
state with one addition
two additions requires two adders
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Sequences of states
•
•
States are linked by transitions.
States are executed sequentially. Each state
may take independent actions (including
assigning to a variable assigned to in a
previous state).
s1
x=a+b
Modern VLSI Design 4e: Chapter 8
s2
x=c+d
y=a+d
Copyright 2008 Wayne Wolf
Data paths from states
•
•
Maximum amount of hardware in data path
is determined by state which executes the
most functionality.
Function units implementing data
operations may be reused across states, but
multiplexers will be required to route
values to the shared function units.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Function unit sharing example
mux allows +
to compute
a+b, a+c
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Conditionals
•
•
Conditional chooses which state to execute
next based on primary input or present
state value.
Can be drawn in either of two ways:
F
x
a=b
T
00
Modern VLSI Design 4e: Chapter 8
01
10
11
Copyright 2008 Wayne Wolf
Execution of conditionals
•
•
An ASM chart describes a Moore
sequential machine. If the logic associated
with an ASM chart fragment doesn’t
correspond to a legal sequential machine,
then it isn’t a legal ASM chart.
Conditional can evaluate only present state
or primary input value on present cycle.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Implementing an ASM branch in
a Moore machine
ASM chart
state transition
graph of
controller
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Mealy machines and ASM
•
•
Mealy machine requires a conditional
output.
ASM notation for conditional output:
0
i1
Modern VLSI Design 4e: Chapter 8
y=c+d
Copyright 2008 Wayne Wolf
Extracting data path and
controller
•
•
•
ASM chart notation helps identify data,
control.
Once you choose what values and
operations go into the data path, you can
determine by elimination what goes into
the controller.
Structure of the ASM chart gives structure
of controller state transition graph.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Data path-controller extraction
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Pipelines
•
Provide higher utilization of logic:
Combinational logic
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
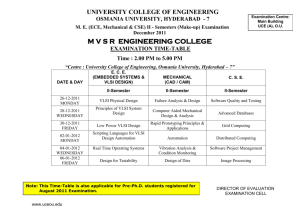
Pipeline metrics
•
Throughput: rate at
which new values
enter the system.
– Initiation interval: time
between successive
inputs.
•
•
•
•
•
Delay through logic
is D, n blocks.
L = D.
T = n/D.
P = D/n.
Latency: delay from
input to output.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
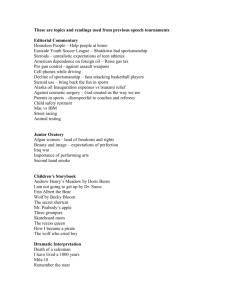
Clock period and throughput vs.
pipeline depth
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Simple pipelines
•
•
•
•
Pure pipelines have no control.
Choose latency, throughput.
Choose register locations with retiming.
Overhead:
– Setup, hold times.
– Power.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Pipelining registers
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Bad cutset for pipelining
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Utilization
•
•
Must fill, drain pipe at start and end of
computation.
Given D cycles of data, n-stage pipe:
– U = D/(D+n)
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Complex pipelines
•
•
•
Actions in pipeline depend on data or
external events.
Data dependencies may be forward or
backward.
Actions on pipe:
– Stall values.
– Abort operation.
– Bypass values.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Pipeline with feedforward
constraint
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Pipeline with feedback constraint
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Pipeline with shared hardware
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Pipeline control
•
•
Controllers are
necessary when pipe
stages take
conditions.
Unconditional pipe
stage controller has
one state, one
transition.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Pipeline with distributed control
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Pipeline controller with condition
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Distributed control for pipeline
flush
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Control for hardware sharing
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf
Product machine for distributed
control
•
•
•
Distributed control is
hard to verify
because state is not
centralized.
Product machine
form identifies global
control actions.
Can verify using
symbolic simulation,
model checking.
Modern VLSI Design 4e: Chapter 8
Copyright 2008 Wayne Wolf