Inference in Continuous and Hybrid Networks (slides)
advertisement
")
Inference in Gaussian and
Hybrid Bayesian Networks
ICS 275B
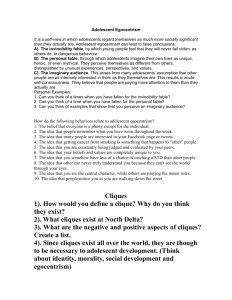
Gaussian Distribution
( x )2
1
P( x)
exp
2
2
Represente d as N( , ) or as a triple (p, , )
1
where p
2
0.4
gaussian(x,0,1)
gaussian(x,1,1)
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
-3
-2
P( x)
-1
0
1
( x )2
1
exp
2
2
N(, )
2
3
0.4
gaussian(x,0,1)
gaussian(x,0,2)
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
-3
-2
-1
P( x)
0
1
2
( x )2
1
exp
2
2
N(, )
3
Multivariate Gaussian
Definition:
Let X1,…,Xn. Be a set of random variables. A
multivariate Gaussian distribution over X1,…,Xn
is a parameterized by an n-dimensional mean
vector and an n x n positive definitive
covariance matrix . It defines a joint density via:
P( X )
1
(2 ) n / 2 | |1/ 2
1
T 1
(
x
)
(
x
)
2
Multivariate Gaussian
P( X )
1
(2 )
n/2
||
1/ 2
1
T 1
2 ( x ) ( x )
Linear Gaussian Distribution
Definition:
Let Y be a continuous node with continuous
parents X1,…,Xk. We say that Y has a linear
Gaussian model if it can be described using
parameters 0, …,k and 2 such that:
P(y| x1,…,xk)=N (μy + 1x1 +…,kxk ; )
=N([μy,1,…,k] , )
A ~ N (a , a )
A
B
B ~ N ([ wa b ], b )
A
B
A
B
0 1Y1 kYk
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
-10
-5
X
0
5
10-10
-5
0
5
Y
10
Linear Gaussian Network
Definition
Linear Gaussian Bayesian network is a
Bayesian network all of whose variables are
continuous and where all of the CPTs are linear
Gaussians.
Linear Gaussian BN Multivariate Gaussian
=>Linear Gaussian BN has a compact
representation
Inference in Continuous Networks
P ( A) N ( a , a ) P(B) N ([ b , wa ], b )
P ( B ) P ( B | A) * P ( A)
A
P ( B | A) * P ( A) N (c, C )
1
C K 1 M 1
where K -1 1 /
a
wa / b
M
2
wa /σ b
/ σb
1
1 b
c CK a CM
(
/
σ
)
*
w
b
b
a
1
1 / b
wa / b
A
B
Marginalization
N
(
c
,
C
)
A
c is a vector containing two quantities 'a 'b
'aa 'ab
C is a matrix of four quantities
'ba 'bb
N ( 'a , 'bb ) is the required answer.
Problems: When we Multiply two arbitrary
Gaussians!
P ( A) N ( a , a ) P(B) N ([ b , wa ], b )
P ( B ) P ( B | A) * P ( A)
A
P ( B | A) * P ( A) N (c, C )
C K 1 M 1
where K -1 1 /
1
a
wa / b
M
2
w a /σ b
/ σb
1
1 b
c CK a CM
(
/
σ
)
*
w
b
b
a
1
1 / b
wa / b
Inverse of K and M
is always well
defined.
However, this
inverse is not!
Theoretical explanation: Why this is the
case ?
P ( A | B ) * P ( B | X ) P ( A, B | X )
Inverse of a matrix
1
of size n x n exists
1
1
0
1
when the matrix is
C K 1 M 1 - 1 2 - 1
of rank n.
0 - 1 1
If all sigmas and
wb / a 0 1 - 1
1 / a
w’s are assumed
to be 1.
where K -1 wb / a
wb2 /σ a
0 - 1 - 1
0
(K-1+M-1) has rank
0
0 0 0
2 and so is not
invertible.
0
M 1 0
0
0
1/ b
wx / b
0 0 0
0
wx / b 0 1 - 1
wx2 /σ b 0 - 1 1
0
0
0
Density vs conditional
However,
Theorem: If the product of the gaussians
represents a multi-variate gaussian density, then
the inverse always exists.
For example, For P(A|B)*P(B)=P(A,B) = N(c,C) then
inverse of C always exists. P(A,B) is a multi-variate
gaussian (density).
But P(A|B)*P(B|X)=P(A,B|X) = N(c,C) then inverse of C
may not exist. P(A,B|X) is a conditional gaussian.
Inference: A general algorithm Computing
marginal of a given variable, say Z.
P( y | X 1 ,..., X k ) N ( y , w1 ,..., wk , y ) ( g , h, k )
Let w [ w1 ,..., wk ]
g
y2
2 y
2
1
2
log( 2 y )
2
y w
h 2
y 1
1 ww' - w
K 2
y - w' 1
Step 1:
Convert all conditional
gaussians to
canonical form
Inference: A general algorithm Computing
marginal of a given variable, say Z.
P ( A | B ) ( g , h, k )
wb / a
1 / a
K
2
wb /σ a
wb / a
P ( B ) ( g ' , h' , k ' )
K ' [1 / σ b ]
Step 2:
Extend all g’s,h’s and
k’s to the same
domain by adding 0’s.
Extending K' and K to the same domain, K remains the same
0
K' is changed to
1 / σ b
0
0
Inference: A general algorithm Computing
marginal of a given variable, say Z.
Step 3: Add all g’s, all h’s and all k’s.
Step 4: Let the variables involved in the
computation be: P(X1,X2,…,Xk,Z)= N(μ,∑)
Inference: A general algorithm Computing
marginal of a given variable, say Z.
P(Z ) N ( z , z )
1k 1 Z
11
..............................
...........
Zk ZZ
Z 1
z ZZ
1
....
k
z
Step 5:
Extract the marginal
Inference: Computing marginal of a given
variable
For a continuous Gaussian Bayesian
Network, inference is polynomial O(N3).
Complexity of matrix inversion
So algorithms like belief propagation are not
generally used when all variables are
Gaussian.
Can we do better than N^3?
Use Bucket elimination.
Bucket elimination
Algorithm elim-bel (Dechter 1996)
Marginalization
operator
b
bucket B:
bucket C:
P(b|a) P(d|b,a) P(e|b,c)
P(c|a) h B (a, d, c, e)
hC (a, d, e)
bucket D:
bucket E:
bucket A:
Multiplication operator
e=0
P(a)
B
C
D
h D (a, e)
E
h (a)
P(a|e=0)
W*=4
”induced width”
(max clique size)
E
A
Multiplication Operator
Convert all functions to canonical form if
necessary.
Extend all functions to the same variables
(g1,h1,k1)*(g2,h2,k2) =(g1+g2,h1+h2,k1+k2)
Again our problem!
h(a,d,c,e) does not represent a density and so
cannot be computed in our usual form N(μ,σ)
Marginalization
operator
b
bucket B:
bucket C:
P(b|a) P(d|b,a) P(e|b,c)
P(c|a) h B (a, d, c, e)
hC (a, d, e)
bucket D:
bucket E:
bucket A:
Multiplication operator
P(e)
P(a)
B
C
D
h D (a, e)
E
h (a)
P(a)
W*=4
”induced width”
(max clique size)
E
A
Solution: Marginalize in canonical form
Although intermediate functions computed in bucket
elimination are conditional, we can marginalize in
canonical form, so we can eliminate the problem of
non-existence of inverse completely.
Algorithm
In each bucket, convert all functions in
canonical form if necessary, multiply them
and marginalize out the variable in the bucket
as shown in the previous slide.
Theorem: P(A) is a density and is correct.
Complexity: Time and space: O((w+1)^3)
where w is the width of the ordering used.
Continuous Node, Discrete Parents
Definition:
Let X be a continuous node, and let
U={U1,U2,…,Un} be its discrete parents and
Y={Y1,Y2,…,Yk} be its continuous parents.
We say that X has a conditional linear
Gaussian (CLG) CPT if, for every value
uD(U), we have a a set of (k+1) coefficients
au,0, au,1, …, au,k+1 and a variance u2 such
that:
k
p( X | u, y ) N (au , 0 au ,i yi , u2 )
i 1
CLG Network
Definition:
A Bayesian network is called a CLG network if
every discrete node has only discrete parents,
and every continuous node has a CLG CPT.
Inference in CLGs
Can we use the same algorithm?
Yes, but the algorithm is unbounded if we are not
careful.
Reason:
Marginalizing out discrete variables from any
arbitrary function in CLGs is not bounded.
If we marginalize out y and k from f(x,y,i,k) , the result is
a mixture of 4 gaussians instead of 2.
X and y are continuous variables
I and k are discrete binary variables.
Solution: Approximate the mixture of
Gaussians by a single gaussian
Multiplication and Marginalization
Multiplication
Convert all functions to
canonical form if
necessary.
Extend all functions to
the same variables
(g1,h1,k1)*(g2,h2,k2)
=(g1+g2,h1+h2,k1+k2)
Strong marginal when marginalizing
continuous variables
Weak marginal when marginalizing
discrete variables
Problem while using this marginalization
in bucket elimination
Requires computing ∑ and μ which is not possible
due to non-existence of inverse.
Solution: Use an ordering such that you never have
to marginalize out discrete variables from a function
that has both discrete and continuous gaussian
variables.
Special case: Compute marginal at a discrete node
Homework: Derive a bucket elimination algorithm
for computing marginal of a continuous variable.
Special Case: A marginal on a discrete
variable in a CLG is to be computed.
B,C and D are continuous variables and A and E is discrete
Marginalization
operator
b
Multiplication operator
bucket B:
P(b|a,e) P(d|b,a) P(d|b,c)
bucket C:
P(c|a) h B (a, d, c, e)
hC (a, d, e)
bucket D:
bucket E:
P(e)
bucket A:
P(a)
h D (a, e)
E
h (a)
P(a)
W*=4
”induced width”
(max clique size)
Complexity of the special case
Discrete-width (wd): Maximum number of
discrete variables in a clique
Continuous-width (wc): Maximum number of
continuous variables in a clique
Time: O(exp(wd)+wc^3)
Space: O(exp(wd)+wc^3)
Algorithm for the general case:Computing
Belief at a continuous node of a CLG
Convert all functions to canonical form.
Create a special tree-decomposition
Assign functions to appropriate cliques
(Same as assigning functions to buckets)
Select a Strong Root
Perform message passing
Creating a Special-tree decomposition
Moralize the Bayesian Network.
Select an ordering such that all continuous
variables are ordered before discrete
variables (Increases induced width).
Elimination order
w
x
y
z
Strong elimination order:
• First eliminate continuous variables
• Eliminate discrete variable when no
available continuous variables
W and X are discrete
variables and Y and Z are
continuous.
Moralized graph has this edge
Elimination order (1)
dim: 2
dim: 2
w
x
y
dim: 2
z
1
Elimination order (2)
dim: 2
dim: 2
w
x
y
2
z
1
Elimination order (3)
3
dim: 2
w
x
y
2
z
1
Elimination order (4)
3
4
w
3
x
w
x
3
y
w
2
y
2
3
z
4
Cliques 2
w
y
1
2
y
2
z
Cliques 1
1
separator
Bucket tree or Junction tree (1)
w
w
x
y
Cliques 2: root
w
y
separator
y
z
Cliques 1
Algorithm for the general case:Computing
Belief at a continuous node of a CLG
Convert all functions to canonical form.
Create a special tree-decomposition
Assign functions to appropriate cliques
(Same as assigning functions to buckets)
Select a Strong Root
Perform message passing
Assigning Functions to cliques
Select a function and place it in an arbitrary
clique that mentions all variables in the
function.
Algorithm for the general case:Computing
Belief at a continuous node of a CLG
Convert all functions to canonical form.
Create a special tree-decomposition
Assign functions to appropriate cliques
(Same as assigning functions to buckets)
Select a Strong Root
Perform message passing
Strong Root
We define a strong root as any node R in the
bucket-tree which satisfies the following property: for
any pair (V,W) which are neighbors on the tree with
W closer to R than V, we have
V \ W or V W
is the set of continuous variables
is the set of discrete variables
Example Strong root
Strong Root
Algorithm for the general case:Computing
Belief at a continuous node of a CLG
Create a special tree-decomposition
Assign functions to appropriate cliques
(Same as assigning functions to buckets)
Select a Strong Root
Perform message passing
Message passing at a typical node
x2
x1
hxna (sep( xn, a))
hx1a ( sep ( x1, a))
oNode “a” contains functions
assigned to it according to
the tree-decomposition
scheme denoted by pj(a)
a
b
hab (sep(a, b))
h
a sep ( a ,b ) ib
i a
(sep(i, a)) pj (a)
j
Message Passing
Two pass algorithm: Bucket-tree propagation
Distribute
Collect
root
root
Figure from P. Green
Lets look at the messages
Collect Evidence
Strong Root
∫C
∫D
∫L
∫Min∫D
∫Mout
Distribute Evidence
Strong Root
∫E∑W,B
∑F
∫E∑W,B
∫E∑B
∑W
Lauritzens theorem
When you perform message passing such
that collect evidence contains only strong
marginals and distribute evidence may
contain weak marginals, the junction-tree
algorithm in exact in the sense that:
The first (mean) and second moments (variance)
computed are true moments
Complexity
Polynomial in #of continuous variables in a clique
(n3)
Exponential in #of discrete variables in a clique
Possible options for approximation
Ignore the strong root assumption and use approximation
like MBTE, IJGP, Sampling
Respect the strong root assumption and use
approximation like MBTE, IJGP, Sampling
Inaccuracies only due to discrete variables if done in one
pass of MBTE.
Initialization (1)
dim: 2
w=
0
0.5
w=
1
0.5
dim: 2
w
x
x=0
0.4
x=1
0.6
X=0
y
dim: 2
z
0.2 10 0
1.0 2 0
,
) N ( y;
N ( y;
1.0 , 0 2 )
1.2 0 10
dim: 2
W=0
0.5 0.9 0.3 9 0
y,
)
N ( z;
0
.
5
0
.
7
0
.
5
0
9
X=1
W=1
0.2 0.3 0.2 2 0
y,
)
N ( z;
0.5 0.7 0.5 0 3
Initialization (2)
Cliques 1
wyz
w=0
g=log(0.5),h=[],K=[]
w=1
g=log(0.5),h=[],K=[]
Cliques 2 (root)
wy
wxy
0.1111
0
x=1
g=log(0.6),h=[],K=[]
X=1
g = -4.1245
h = [-0.02 0.12]’
K = [0.1 0; 0 0.1]
g = -3.0310
h = [0.5 -0.5]’
K = [0.5 0.5;0.5 0.5]
W=1
g = -4.0629
h = [0.0889 -0.0111 -0.0556 0.0556]
0.1444 -0.0089
-0.1
0.0778
K = -0.0089
0.0378 -0.0333 -0.0556
-0.0333
-0.0556
g=log(0.4),h=[],K=[]
X=0
W=0
-0.1
0.0778
x=0
0
0.1111
g = -2.7854
h = [0.0867 -0.0633 -0.1000 -0.1667]
0.2083 -0.1467
0.15 -0.2333
K = -0.1467
0.1033
-0.1
0.1667
0.15
-0.2333
-0.1
0.1667
0.5
0
0
0.3333
Initialization (3)
Cliques 1
wyz
Cliques 2 (root)
wxy
wy
empty
wx=00
wx=10
g = -5.1308
h = [-0.02 0.12]’
K = [0.1 0; 0 0.1]
g = -5.1308
h = [-0.02 0.12]’
K = [0.1 0; 0 0.1]
wx=01
g = -3.5418
h = [0.5 -0.5]’
K = [0.5 0.5;0.5 0.5]
W=0
g = -4.7560
h = 0.0889 -0.0111
K = 0.1444 -0.0089
-0.0089
-0.1
0.0778
0.0378
-0.0333
-0.0556
wx=11
g = -3.5418
h = [0.5 -0.5]’
K = [0.5 0.5;0.5 0.5]
W=1
-0.0556
0.0556
-0.1
-0.0333
0.1111
0
0.0778
-0.0556
0
0.1111
g = -3.4786
h = 0.0867 -0.0633
K = 0.2083 -0.1467
-0.1467
0.15
-0.2333
0.1033
-0.1
0.1667
-0.1
0.15
-0.1
0.5
0
-0.1667
-0.2333
0.1667
0
0.3333
Message Passing
Cliques 1
wyz
Cliques 2 (root)
wy
empty
Collect evidence
* (wy ) (wyz ) wy
* (wy )
*
(wxy ) (wxy )
(wy )
wxy
Distribute evidence
** (wy ) * (wxy )wy
** (wy )
**
(wyz ) (wyz ) *
(wy )
Collect evidence (1)
Cliques 1
Cliques 2 (root)
wyz
y1
y ,
y2
wy
empty
h1
K11
h , K
h2
K 21
y T2 ]T d y1 (y 2 ; gˆ , hˆ , Kˆ )
T
[
y
1
wxy
K12
K 22
y2 y3
1
1
1
g g ( p log( 2 ) log | K11 | h1T K11 h1 )
y2
2
1
(y1,y2)(y2)
hˆ h 2 K 21K11 h1
1
Kˆ K K K K
y y
22
21
11
12
1 2
Collect evidence (2)
Cliques 1
Cliques 2 (root)
wyz
wxy
wy
empty
W=0
g = -4.7560
h = 0.0889 -0.0111
K = 0.1444 -0.0089
-0.0089
-0.1
0.0778
0.0378
-0.0333
-0.0556
W=1
-0.0556
0.0556
-0.1
-0.0333
0.1111
0
0.0778
-0.0556
0
0.1111
g = -3.4786
h = 0.0867 -0.0633
K = 0.2083 -0.1467
-0.1467
0.15
-0.2333
0.1033
-0.1
0.1667
-0.1
0.15
-0.1
0.5
0
marginalization
W=0
g = -0.6931
h = [0.1388 0]’ *1.0e-16
K = [0.2776 -0.0694;0.0347 0]*1.0e-16
W=1
g = -0.6931
h = [0 0]’
K = [0 0 0 0]
-0.1667
-0.2333
0.1667
0
0.3333
Collect evidence (3)
Cliques 1
Cliques 2 (root)
wyz
wxy
wy
empty
W=0
W=1
g = -0.6931
h = [0.1388 0]’ *1.0e-16
K = [0.2776 -0.0694;0.0347 0]*1.0e-16
g = -0.6931
h = [0 0]’
K = [0 0 0 0]
multiplication
wx=00
wx=10
g = -5.1308
h = [-0.02 0.12]’
K = [0.1 0; 0 0.1]
g = -5.1308
h = [-0.02 0.12]’
K = [0.1 0; 0 0.1]
wx=00
wx=10
g = -5.8329
h = [-0.02 0.12]’
K = [0.1 0; 0 0.1]
g = -5.8329
h = [-0.02 0.12]’
K = [0.1 0; 0 0.1]
wx=01
g = -3.5418
h = [0.5 -0.5]’
K = [0.5 0.5;0.5 0.5]
wx=01
g = -4.2350
h = [0.5 -0.5]’
K = [0.5 0.5;0.5 0.5]
wx=11
g = -3.5418
h = [0.5 -0.5]’
K = [0.5 0.5;0.5 0.5]
wx=11
g = -4.2350
h = [0.5 -0.5]’
K = [0.5 0.5;0.5 0.5]
Distribute evidence (1)
Cliques 1
Cliques 2 (root)
wyz
wxy
wy
W=0
g = -4.7560
h = 0.0889 -0.0111
K = 0.1444 -0.0089
-0.0089
-0.1
0.0778
0.0378
-0.0333
-0.0556
W=1
-0.0556
0.0556
-0.1
-0.0333
0.1111
0
0.0778
-0.0556
0
0.1111
g = -3.4786
h = 0.0867 -0.0633
K = 0.2083 -0.1467
-0.1467
0.15
-0.2333
0.1033
-0.1
0.1667
-0.1
0.15
-0.1
0.5
0
division
W=0
g = -0.6931
h = [0.1388 0]’ *1.0e-16
K = [0.2776 -0.0694;0.0347 0]*1.0e-16
W=1
g = -0.6931
h = [0 0]’
K = [0 0 0 0]
-0.1667
-0.2333
0.1667
0
0.3333
Distribute evidence (2)
Cliques 1
Cliques 2 (root)
wyz
wy
wxy
W=0
g = -4.0629
h = 0.0889 -0.0111
K = 0.1444 -0.0089
-0.0089
-0.1
0.0778
0.0378
-0.0333
-0.0556
W=1
-0.0556
0.0556
-0.1
-0.0333
0.1111
0
0.0778
-0.0556
0
0.1111
g = -2.7854
h = 0.0867 -0.0633
K = 0.2083 -0.1467
-0.1467
0.15
-0.2333
0.1033
-0.1
0.1667
-0.1
0.15
-0.1
0.5
0
-0.1667
-0.2333
0.1667
0
0.3333
Distribute evidence (3)
Cliques 1
Cliques 2 (root)
wyz
wxy
wy
wx=00
wx=10
g = -5.8329
h = [-0.02 0.12]’
K = [0.1 0; 0 0.1]
g = -5.8329
h = [-0.02 0.12]’
K = [0.1 0; 0 0.1]
wx=01
g = -4.2350
h = [0.5 -0.5]’
K = [0.5 0.5;0.5 0.5]
Marginalize over x
w=0
w=1
logp = -0.6931
mu = [0.52 -0.12]’
5.5456 -0.6336
Sigma =-0.6336
6.3616
logp = -0.6931
mu = [0.52 -0.12]’
5.5456 -0.6336
Sigma =-0.6336
6.3616
wx=11
g = -4.2350
h = [0.5 -0.5]’
K = [0.5 0.5;0.5 0.5]
Distribute evidence (4)
Cliques 1
Cliques 2 (root)
wyz
wxy
wy
W=0
g = -4.0629
h = 0.0889 -0.0111
K = 0.1444 -0.0089
-0.0089
-0.1
0.0778
0.0378
-0.0333
-0.0556
W=1
-0.0556
0.0556
-0.1
-0.0333
0.1111
0
0.0778
-0.0556
0
0.1111
g = -2.7854
h = 0.0867 -0.0633
K = 0.2083 -0.1467
-0.1467
0.15
-0.2333
0.1033
-0.1
0.1667
-0.1
0.15
-0.1
0.5
0
-0.1667
-0.2333
0.1667
0
0.3333
multiplication
w=0
w=1
logp = -0.6931
mu = [0.52 -0.12]’
5.5456 -0.6336
Sigma =-0.6336
6.3616
logp = -0.6931
mu = [0.52 -0.12]’
5.5456 -0.6336
Sigma =-0.6336
6.3616
w=0
g = -4.3316
h = [0.0927 -0.0096]’
0.1824
0.0182
K = 0.0182
0.159
w=1
g = -0.6931
h = [0.0927 -0.0096]’
0.1824
0.0182
K = 0.0182
0.159
Canonical form
Distribute evidence (5)
Cliques 1
Cliques 2 (root)
wyz
wy
wxy
W=0
g = -8.3935
h = 0.1816 -0.0207 -0.0556
0.3268
0.0093
-0.1
K = 0.0093
0.1968 -0.0333
-0.1
0.0778
-0.0333
-0.0556
0.1111
0
W=1
0.0556
0.0778
-0.0556
0
0.1111
g = -7.1170
-0.073
h = 0.1793
0.3907 -0.1285
K=
-0.1285
0.15
-0.2333
0.2623
-0.1
0.1667
-0.1
0.15
-0.1
0.5
0
-0.1667
-0.2333
0.1667
0
0.3333
After Message Passing
Cliques 1
p(wyz)
Cliques 2 (root)
p(wy)
p(wxy)
Local marginal distributions