lect4xxx
advertisement

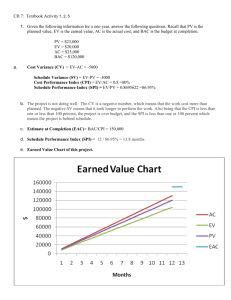
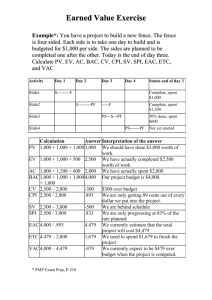
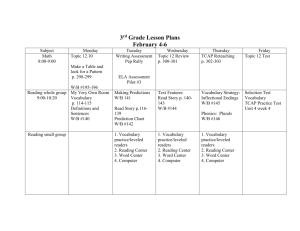
Department of Electronic & Electrical Engineering Lect 4: Serial interfaces Serial Interfaces allow communication between devices sending one bit a time. In contrast Parallel interfaces have multiple data lines allowing whole words to be sent as a single operation. There are different protocols for serial communication, common examples: ● ● Serial Peripheral Interface SPI I2C (i-squared cee) Department of Electronic & Electrical Engineering Resources ● ● ● ● http://en.wikipedia.org/wiki/Serial_Peripheral_Interface_Bus Quintessential PIC chapter 12 25AA040 serial eeprom data sheet. MCP3001 ADC data sheet. Department of Electronic & Electrical Engineering Serial Peripheral Interface Bus (SPI) - Lots of devices use SPI to communicate - Pronounced ess-pee-eye OR spy - Protocol using 4 lines - Master Device (eg. PIC ) - Slave Device(s) (eg. SPI eeprom OR an ADC) - Many PICs have inbuilt SPI or I2C - The PIC16F84A does not! (we will implement it in software) Department of Electronic & Electrical Engineering The SPI bus specifies four logic signals: ● SCLK: serial clock (used to synchronise serial transfer) ● MOSI: master output, slave input (used to send data to device) ● MISO: master input, slave output (used to receive data from device ) ● SS: slave select (active low, output from master). ● The names are often different on the device data sheet! Department of Electronic & Electrical Engineering Connections for the lab example. Department of Electronic & Electrical Engineering Example: 25AA040A (see data sheet) 2.1 Principles of Operation The 25XX040A is a 512-byte Serial EEPROM designed to interface directly with the Serial Peripheral Interface (SPI) port of many of today’s popular microcontroller families, including Microchip’s PIC®microcontrollers. It may also interface with microcontrollers that do not have a built-in SPI port by using discrete I/O lines programmed properly in firmware to match the SPI protocol. Department of Electronic & Electrical Engineering Example: SPI eeprom 25AA040 Department of Electronic & Electrical Engineering Memory 8bit Memory 04 Address 01011101 01111100 01010100 11010100 01011101 00011001 01010100 11010100 01011101 00011001 Data Department of Electronic & Electrical Engineering 25A040 Functional diagram Commands address Data out Department of Electronic & Electrical Engineering 25A040 instruction set Department of Electronic & Electrical Engineering Accessing the Device. ● ● ● ● ● ● We initiate an operations by taking CS low. We write instructions via the SI pin. We read via the SO pin Data is clocked by sending a pulse to SCK (low-high-low). We finish an operation by taking CS high. Device is ready for next operation. Department of Electronic & Electrical Engineering Timing Diagrams Department of Electronic & Electrical Engineering Timing values Department of Electronic & Electrical Engineering Timing considerations. ● ● ● ● PIC instruction is 4 clock cycles @ 4MHz 1 instruction takes 1 uS all critical times < 1uS No need to add delays Department of Electronic & Electrical Engineering 25AA040 Instruction set Department of Electronic & Electrical Engineering Sequence to initiate reading Send read instruction (SI) Send address to be read Read data (SO) Department of Electronic & Electrical Engineering Reading data. • • • • Once we have set the address we can read data from the EEPROM. The 25A040 automatically advances the address every byte (8bits) So it is easy to read sequentially from memory For the lab exercise we have a 7seg display. • This can display a HEX number (4bits) • The example reads data in nibbles (4bits) • Each data value is displayed (with a delay) Department of Electronic & Electrical Engineering Example Code . . . Sketch ● ● ● ● ● ● ● Initialize PORTS Initialize device (set CS low) Send read instruction Send address Read data (4bits) Display data Loop read and display . . . Department of Electronic & Electrical Engineering Connections for the lab example. Department of Electronic & Electrical Engineering Code fragments --- 1. Define some constants ; define the bits of PORTA as constants ; so we can write stuff like: ; bcf PORTA,SPI_CLK ; sets clock low. SPI_SI SPI_CLK SPI_SO SPI_CS EQU EQU EQU EQU H'0' H'1' H'2' H'3' ; See diagram in previous slide ; spi IO registers Used to store values to be sent to/from EEPROM SPI_IN_BUF EQU H'25' SPI_OUT_BUF EQU H'26' Department of Electronic & Electrical Engineering Setting up the PORT ; ; ; ; RA0 --> SI RA1 --> SCK RA2 --> SO RA3 --> !CS serial in (PIC out) clock (PIC out) serial out (PIC in) chip enable (PIC out) + 4.7k pull up movlw B'00000100' movwf TRISA ; port A - just RA2 --> SPI_SO input ; all others are outputs Department of Electronic & Electrical Engineering Sequence to initiate reading Send read instruction (SI) Send address to be read Read data (SO) Department of Electronic & Electrical Engineering Initialize and send address. ; start of spi READ (see Data sheet FIG2-1) bcf bsf bcf movlw movwf call movlw movwf call PORTA , SPI_CLK ;(1) set spi clock low PORTA , SPI_CS ;(2) make CS (chip select) high PORTA , SPI_CS ;(3) start by pulling CS low B'00000011' ;(4) read instruction and A8=0 SPI_OUT_BUF ; send to chip spi_out ; spi_out sends contents of SPI_OUT_BUF B'00000000' ;(5) low byte of address SPI_OUT_BUF ;send to chip spi_out Department of Electronic & Electrical Engineering Routine to write a byte to the SPI device ● ● ● ● ● ● SPI_OUT_BUF contains the data. We need to send the most significant bit first. Copy the left most (MSB) of SPI_OUT_BUF to the SPI_SI pin Strobe the SPI_CLK to make device read the data Shift SPI_OUT_BUF left ready for writing the next bit. Repeat 8 times for each bit. Carry SPI_OUT_BUF 01101001 SPI_SI=0 strobe SPI_SI=1 strobe 0 1 rlf SPI_OUT_BUF,f rlf SPI_OUT_BUF,f 11010010 10100100 Department of Electronic & Electrical Engineering RLF Rotate Left through Carry Department of Electronic & Electrical Engineering Routine to write one bit to the SPI device ;-----------------------------------------------------------------------------; write left most bit (MSB) of SPI_OUT_BUF to device ; SPI_OUT_BUF is shifted one bit to the left spi_write_bit: rlf SPI_OUT_BUF,f ; rotate to set carry bit if MSB is 1 btfsc STATUS,C ; skip if carry is clear goto set_out_bit ; if carry bit is set bcf PORTA,SPI_SI ; if carry bit is clear (SI pin=0) goto doit_write_bit ; send bit set_out_bit: bsf PORTA,SPI_SI ; if carry (SI pin=1) ; now send bit to eeprom doit_write_bit: call spi_strobe ; advance clock to send bit return Department of Electronic & Electrical Engineering Strobe routine (read/write next bit) ; advance the clock in the serial EEPROM ; no delay needed if running from a 4MHz clock spi_strobe: bsf PORTA,SPI_CLK ; set clock high bcf PORTA,SPI_CLK ; set clock low return Department of Electronic & Electrical Engineering Writing one byte to the SPI device ; routine to write SPI_OUT_BUF reg to the SPI device spi_out: call spi_write_bit ; write MSB and shift SPI_OUT_BUF right call spi_write_bit ; write next bit etc call spi_write_bit call spi_write_bit call spi_write_bit call spi_write_bit call spi_write_bit call spi_write_bit return Department of Electronic & Electrical Engineering Recap --- Initialize and send address. ; start of spi READ (see Data sheet FIG2-1) bcf bsf bcf movlw movwf call movlw movwf call PORTA , SPI_CLK ;(1) set spi clock low PORTA , SPI_CS ;(2) make CS (chip select) high PORTA , SPI_CS ;(3) start by pulling CS low B'00000011' ;(4) read instruction and A8=0 SPI_OUT_BUF ; send to chip spi_out ; spi_out sends contents of SPI_OUT_BUF B'00000000' ;(5) low byte of address SPI_OUT_BUF ;send to chip spi_out Department of Electronic & Electrical Engineering Reading the data. • • • • We are now ready to start reading data. We read the data in chunks of 4bits so we can use 7seg display We put a delay in the loop so we can see each value. The example code does this forever! Department of Electronic & Electrical Engineering Main loop --- read data nibble at a time ; now ready to read from the SPI-EEPROM loop: call spi_read_nibble ; (6) grab next nibble from the eeprom call conversion ; convert to 7seg code xorlw H'FF' ; invert for common annode movwf PORTB ; output to 7seg LED call delay ; wait a bit goto loop ; carry on Department of Electronic & Electrical Engineering Routine to read a nibble ;---------------------------------------------------------------------------; read 1 nibble (4bits) from the spi eeprom into W ; uses SPI_IN_BUF to assemble nibble bit by bit spi_read_nibble: clrf SPI_IN_BUF ; clear SPI_IN_BUF call spi_read_bit ; rotate left then read a bit call spi_read_bit call spi_read_bit call spi_read_bit movfw SPI_IN_BUF ; return value in W return Department of Electronic & Electrical Engineering Routine to read a bit ;------------------------------------------------------------------------------; read a single bit from ee-prom into SPI_IN_BUF (right most bit) ; rotate SPI_IN_BUF to the left before reading spi_read_bit rlf SPI_IN_BUF,f ; rotate buffer left btfsc PORTA,SPI_SO ; test the SO pin bsf SPI_IN_BUF,0 ; high? then set bit0 call spi_strobe ; advance the clock return Department of Electronic & Electrical Engineering DEMO : readSpiEEPROM.asm