Fulltext - Brunel University Research Archive
advertisement

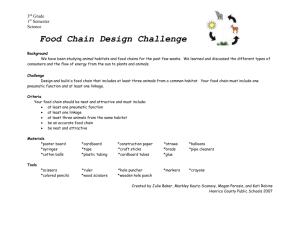
Control of 3D Printed Ambidextrous Robot Hand Actuated by Pneumatic Artificial Muscles Mashood Mukhtar Tatiana Kalganova Department of Electronic and Computer Engineering Brunel University, Kingston Lane, Uxbridge London, UK Mashood.Mukhtar@brunel.ac.uk Department of Electronic and Computer Engineering Brunel University, Kingston Lane, Uxbridge London, UK Emre Akyürek Department of System Engineering ESIEE Paris Noisy-le-Grand Cedex, France Department of Electronic and Computer Engineering Brunel University, Kingston Lane, Uxbridge London, UK Abstract—Production of robotic hands have significantly increased in recent years due to their high demand in industry and wide scope in number of applications such as tele-operation, mobile robotics, industrial robots, biomedical robotics etc. Following this trend, there have been many researches done on the control of such robotic hands. Since human like clever manipulating, grasping, lifting and sense of different objects are desirable for researchers and crucial in determining the overall performance of any robotic hand, researchers have proposed different methods of controlling such devices. In this paper, we discussed the control methods applied on systems actuated by pneumatic muscles. We tested three different controllers and verified the results on our uniquely designed ambidextrous robotic hand structure. Performances of all three control methods namely proportional–integral-derivative control (PID), Bang-bang control and Backstepping control has been compared and best controller is proposed. For the very first time, we have validated the possibility of controlling multifinger ambidextrous robot hand by using Backstepping Control. The five finger ambidextrous robot hand offers total of 13 degrees of freedom (DOFs) and it can bend its fingers in both ways left side and right side offering full ambidextrous functionality by using only 18 pneumatic artificial muscles (PAMs). Pneumatic systems are being widely used in many domestic, industrial and robotic applications due to its advantages such as structural flexibility, simplicity, reliability, safety and elasticity. Keywords—Robot Hand; Ambidextrous Design; Pneumatic Muscles; Grasping Algorithms; Backstepping control; PID Control; Bang-bang Control; Control Methods; Pneumatic Systems I. INTRODUCTION The world is overwhelmed with incredible advances in engineering. This advancement has resulted in production of many robotics that are currently being used across various industries [1] [2]. The use of robotics not only allows more productivity and safety at workplace but also save time and money. The history of robot development goes back to the Nicolas Lesne ancient world [3]. It all started from a basic idea and reached today at a point where most complicated and risky tasks are being handled by robots [4]. This rapid growth resulted is production of complicated robots [5] and intelligent control algorithms [6]. In the past considerable research has been done and as a result many control algorithms were proposed [7], [8], [9], [10], [11], [12] and [13]. The first theoretical basis of the pneumatic system control was made by Prof. J. L. Shearer in 1956 [14]. The pneumatic systems are widely used in robotics [15] [16], food packaging [17], construction [18], biomechanics industry [19] and manufacturing applications [20]. In this paper we will first present the detail classification of control systems and then review the related work that has been done in the past. In particular, our focus would be on control algorithms implemented on pneumatic systems using PID controller, Bang-bang controller and Backstepping controller. We will further test these controllers on an ambidextrous robot hand and compare the results to find the best option available to drive such devices. Although number of control schemes are found in the literature [21], [22] such as adaptive control [23], [24], direct continuous-time adaptive control [25], neurofuzzy PID control [26] hierarchical control [27], [28], slave-side control [29], intelligent controls [30], neural networks [31] [32], just-intime control [33] ,Bayesian probability [34], equilibrium-point control [35], fuzzy logic control [36], [37], [38], [39], [40], machine learning [41], [42], evolutionary computation [43] [44] and genetic algorithms [45] [46], nonlinear optimal predictive control [47],optimal control [48], [49] [50], stochastic control [51], variable structure control [52], chattering-free robust variable structure control [53] and energy shaping control [54], gain scheduling model-based controller [55], sliding mode control [56], proxy sliding mode control [57], neuro-fuzzy/genetic control [39] [26] but there are five types of control systems (Fig.1) mainly used on pneumatic muscles. These are feedback control system, feed- forward control System, non-Linear control system, artificial Intelligence based control system and hybrid Systems. falling objects. A laser displacement sensor is also used for the two-fingered robot hand introduced in [62]. It measures the vertical slip displacement of the grasped object and allows the hand to adjust its grasp. In our research, the aim of the vision sensor is to detect objects close to the palms and to automatically trigger grasping algorithms. Once objects are detected by one of the vision sensors, grasping features of the ambidextrous robot hand are investigated using three different algorithms, which are proportional-integrative-derivative (PID), bang-bang and Backstepping controllers. Despite the nonlinear behavior of PAMs actuators [68], [69] previous researches indicates that these three algorithms are suitable to control pneumatic systems. This research aims to validate the possibility of controlling a uniquely designed ambidextrous robot hand using PID controller, Bang-bang controller and Backstepping controller. The ambidextrous robot hand is a robotic device for which the specificity is to imitate either the movements of a right hand or a left hand. Fig. 1. Classification of control algorithm implemented on pneumatic systems. In this research, we investigated the feedback control system and non-linear control systems. Concept of feedback system was first introduced by Greeks around 2000 years ago [59]. Feedback is a control system in which an output is used as a feedback to adjust the performance of a system to meet expected output. Control systems with at least one nonlinearity present in the system are called nonlinear control systems. The purpose of designing such system is to stabilise the system at certain target. In order to reach a desired output value, output of a processing unit (system to be controlled) is compared with the desired target and then feedback is provided to the processing unit to make necessary changes to reach closer to desire output. Grasping abilities of the ambidextrous hand has been investigated using tactile sensors. Uses of tactical sensors are quiet common and it has been implemented on robotic hands driven by motors several time as it can be seen in [16], [60], [61], [62] and [63] or robot hands driven by PAMs [64], [65] and [66]. The automation of the ambidextrous robot hand and its interaction with objects are also augmented by implementing vision sensors on each side of the palm. Similar systems have already been developed in the past. For instance, the two-fingered robot hand discussed in [67] receives vision feedback from an omnidirectional camera that provides a visual hull of the object and allows the fingers to automatically adapt to its shape. The three-fingered robot hand developed by Ishikawa Watanabe Laboratory [61] is connected to a visual feedback at a rate of 1 KHz. Combined with its high-speed motorized system that allows a joint to rotate by 180 degrees in 0.1 seconds, it allows the hand to interact dynamically with its environment, such as catching (a) (b) Fig.2. Ambidextrous Robot Hand, where (a) is the ambidextrous mode and (b) is the left mode. As it can be seen in Fig.2 (a), its fingers can bend in one way or another to include the mechanical behavior of two opposite hands in a single device. The Ambidextrous Robot Hand has a total of 13 degrees of freedom (DOFs) and is actuated by 18 pneumatic artificial muscles (PAMs) [58]. II. RELATED WORK A. PID Controller PID stands for Proportional, integral and derivative. It is by far the most commonly used controller in industry due to its simplicity and robust performance under various operating conditions. PID controllers are indeed widely used in the robotics area. They can drive either motorized systems, such as the ACT hand [70] and the Shadow hand [16]. In [71]] and [72], PID controllers were used to regulate both the position of the system and the pressure of its muscles. Similar concept of loops was applied to robot hands in [73], [74]. In [75] a control strategy using modified PID controller and pusher mechanism is proposed to achieve position and time accuracy required for the task. PID is also sometime combined with artificial intelligent controller such as neural networks to get the best results as can be seen in [76] or [77] or fuzzy logic in [78]. An adaptive fuzzy PD controller and adaptability of such controller with pneumatic servo system was presented in [79]. In [80], a non-linear PID controller and neural network is used to improve the control of PAM suitable for plants with nonlinearity uncertainties and disturbances. Particle swarm optimization (PSO) algorithm is used in [81] to self-tune PID controller of a joint introduced. In [82], [83], [84] and [85] PID controls implemented on a bipedal walking robot called “Lucy. Another approach is performed in [86], where the positioning of PAMs is driven by PID loops combined to nonlinear coefficients. In [87] authors investigated the possibility of applying a hybrid feed-forward inverse nonlinear autoregressive with exogenous input (NARX) fuzzy model-PID controller to a nonlinear pneumatic artificial muscle (PAM) robot arm to improve its joint angle position output performance. B. Bang-bang Controller Bang-bang controllers are a nonlinear style of feedback controller also known as on-off controller or hysteresis controller. It is used to switch between two states abruptly. Bang-bang controllers are widely used in systems that accept binary inputs. System makes decision to turn controller on or off based on threshold and target values [88]. Application to regular and Bang-bang control is discussed in great detail in [89]. Bang-bang controller is not popular in robotics because its shooting functions are not smooth [90] and need regularisation [91]. Fuzzy logic [92], [93] and PID are usually combined with bang-bang controller to add flexibility and determine switching time of Bang-bang inputs [58]. Bram Vanderborght et al. in [82], [94], [95], [84], [96] and [83] controlled a bipedal robot actuated by pleated pneumatic artificial muscles using bang-bang pressure controller. Stephen M Cain et al. in [97], studied locomotor adaptation to powered ankle-foot orthoses using two different orthosis control methods. The pressure in the pneumatic muscles was controlled by footswitch control and proportional myo-electric control. In footswitch control, bang-bang controller is used to regulate air pressure in pneumatic muscle. Dongjun Shin et al. in [98], proposed the concept of hybrid actuation for human friendly robot systems by using distributed macro-Mini control approach [99]. The hybrid actuation controller employ modified bang-bang controller to adjust the flow direction of pressure regulator. Zhang, Jia-Fan et al. in [100], presented a novel pneumatic muscle based actuator for wearable elbow exoskeleton. Hybrid fuzzy controller composed of bang-bang controller and fuzzy controller is used for torque control. H. X. Zhang et al. in [101], presented the improved full pneumatic climbing robot. Effectiveness of two approaches was tested to check the system stiffness and control quality. Bang-bang controller is used to control the cylinder movement and eliminate oscillation. Juan Gerardo Castillo Alva et al. in [102], discussed the development of fatigue testing machine using a pneumatic artificial muscle. Using learning control techniques, a special control system is developed for the machine. The proposed methodology consists on implementing a bang-bang controller to control the solenoid valves. C. Backstepping Controller Backstepping is a control technique originally intruded by Peter V. Kokotovic in 1990 to offer stabilise control with a recursive structure based on derivative control.and it was limited to nonlinear dynamical systems. Mohamed et al. presented a synthesis of a nonlinear controller to an electro pneumatic system in [103]. Nonlinear Backstepping control and nonlinear sliding mode control laws were applied to the system under consideration. First, the nonlinear model of the electro pneumatic system was presented. It was transformed to be a nonlinear affine model and a coordinate transformation was then made possible by the implementation of the nonlinear controller. Two kinds of nonlinear control laws were developed to track the desired position and desired pressure. Experimental results were also presented and discussed. P. Carbonell et al. compared two techniques namely sliding mode control (SMC) and Backstepping control (BSC) in [104] and found out BSC is somewhere better than SMC in controlling a device. He further applied BSC coupled with fuzzy logic in [105]. In [106], a paralleled robot project is discussed which is controlled by BSC. Since literature review revealed no multifinger robot hand (actuated by PAMs) is ever driven using BSC, research presented in this paper validates the possibility of driving multifinger robot hand using BSC. We used an ambidextrous robot hand to test the Backstepping controller that goes even a step further to prove the originality of research. III. IMPLEMENTATION OF A PID CONTROLLER As the name suggests, PID controller is a combination of three different controller’s (Fig. 3) proportional, integral, derivative. Proportional controller serves as a heart of a control system; it provides corrective force proportional to error present. Although proportional control is useful for improving the response of stable systems and considered a building block of many applications but it comes with a steady-state error problem which is eliminated by adding integral control. Integral control restores the force that is proportional to the sum of all past errors, multiplied by time. On one hand integral controller solves a steady-state error problem created by proportional controller but on the other hand integral feedback makes system overshoot. Equation of proportional control: Pout K p e t e t = Error E at specific time E SP(ideal output ) PV (measurable output ) t e t dt = Sum of the instantaneous error over time 0 d e t dt = Rate of change (error) Pout = System output K p = Proportional gain constant e t = Error E at specific time E SP(ideal output) PV (measurable output) Equation of integral control: t I outI K i e t dt 0 I out = System output K I = Integral gain constant Fig.3. Block diagram of PID Controller t e t dt = Sum of the instantaneous error over time 0 PID algorithms can be divided into three main categories: Serial, ideal and parallel. To overcome overshooting problem, derivative controller is used. It slows the controller variable just before it reaches its destination. Derivatives controller is always used in combination with other controller and has no influence on the accuracy of a system. All these three control have their strengths and weakness and when combine together it offers the maximum strength whilst minimizing weakness. Ideal PID Algorithm: Equation of derivative control: Serial PID Algorithm: Dout d Kd e t dt Dout = System output Kd = Derivative gain constant d e t = Rate of change (error) dt When combine all three controller, the equation becomes: d Output PID K P e t K i e t dt K d e t dt 0 t Output PID = output from PID controller Pout = Proportional control gain I out = Integral control gain Dout = Derivative control gain Output Kc[e t 1 de t e t d t D ] I dt Parallel PID Algorithm: Output Kp[e t ] Output Kc[e t 1 de t e t d t D I dt 1 d e t d t ][1 D ] I dt PID Control loops were implemented on an ambidextrous robot hand using the parallel form of a PID controller, for which the equation is as follows: 𝑡 𝑢(𝑡) = 𝐾𝑝 𝑒(𝑡) + 𝐾𝑖 ∫ 𝑒(𝜏)𝑑𝜏 + 𝐾𝑑 0 𝑑 𝑒(𝑡) 𝑑𝑡 (1) Snapshots of experiments can be seen in Fig.4. The force targets are fixed at 13N in Fig.4 (a) and at 15N in Fig.4 (b). It is observed that medial and distal phalanges flex when force applied remain below 13N and extends above 15N. Therefore, the system reaches a stable state when the force feedback stands between these two limit values and provide enough force to hold light objects. In the snapshots Fig. 4 (c) and Fig.4 (d), a single force target is fixed at 0.05 N and the finger’s prototype goes backward when it touches a piece of paper. (a) (b) (c) (d) target of 12 N with an error margin of 0.5 N. A can of soft drink is brought close to the hand and data is collected every 0.05 sec. The experiment result is illustrated in Fig.5 and data collected from the left hand mode during experiment is shown in Fig.6. If we notice Fig.6, we will realise that data is only collected from four of the five figured ambidextrous robot hand and graph started plotting from 0.1 sec. This is due to the fact that the thumb stabilises at 12.23N far higher than other fingers and no interaction was reported before 0.1 sec. Fig.4. Interactions of light weight objects and an early design of an ambidextrous finger is shown in the figure. According to the force put as target, the prototype provides enough force to maintain pieces of metal in (a) and (b) whereas the medial and distal phalanges go backward when they touch a piece of paper in (c) and (d). [ 𝐾𝑝𝑝𝑙 /3 −𝐾𝑝𝑚𝑙 𝐾𝑝𝑚𝑙 ]=[ ]=[ ] −𝐾𝑖𝑟𝑙 𝐾𝑝𝑚𝑟 𝐾𝑖𝑝𝑙 /3 (3) When object interact on the left side of the hand, equation can be written as follows: 0.4 𝑋 𝐾𝑝𝑚𝑙 𝐾𝑝 −𝐾𝑝𝑚𝑟 [ 𝑚𝑟 ] = [ ]=[ ] 𝐾𝑖𝑚𝑟 −𝐾𝑖𝑚𝑟 0.4 𝑋 −𝐾𝑖𝑚𝑙 (4) Same ratios are applied to the integrative gain constants when object interact on right side of the hand. Using equation (2), PID control loops with identical gain constants are sent to the four fingers with a target of 1 N and an error margin of 0.05 N, whereas the thumb is assigned to a Fig. 5. The Ambidextrous Robot Hand holding a can (both right and left) with a grasping movement implemented with PID controllers. Force (N) Output 𝑢 (t) should be calculated exactly in the same way as described in equation (1) but this is not the case due to asymmetrical tendon routing of ambidextrous robot hand [107]. Mechanical specifications are taken into consideration before calculating the 𝑢 (t). It is divided into three different outputs for the three PAMs driving each finger. These three outputs are 𝑢𝑝𝑙 (𝑡), 𝑢𝑚𝑟 (𝑡) and 𝑢𝑚𝑙 (𝑡), respectively attributed to the proximal left, medial right and medial left PAMs. The same notations are used for the gain constants. The adapted PID equation is defined as: 𝑒(𝑡) 𝑡 𝐾𝑝𝑝𝑙 𝐾𝑖𝑝𝑙 𝐾𝑑 𝑢𝑝𝑙 (𝑡) ∫ 𝑒(𝜏)𝑑𝜏 (2) [𝑢𝑚𝑟 (𝑡)] = [𝐾𝑝𝑚𝑟 𝐾𝑖𝑚𝑟 𝐾𝑑 ] 0 𝐾𝑝𝑚𝑙 𝐾𝑖𝑚𝑙 𝐾𝑑 𝑢𝑚𝑙 (𝑡) 𝑑 [ 𝑑𝑡 𝑒(𝑡) ] To imitate the behaviour of human finger correctly, some of the pneumatic artificial muscles must contract slower than others. This prevents having medial and distal phalanges totally close when the proximal phalange is bending. The proportional constant gains are consequently defined as: 1.1 1.05 1 0.95 0.9 0.85 0.8 0.75 Forefinger Middle finger Ring finger Little finger 0.1 0.15 0.2 0.25 Time (sec) 0.3 Fig. 6. Graph shows force against time of the four fingers while grasping a drink can with PID controllers. From Fig.6, it can be seen that grasping of a can of soft drink began at 0.15 approximately and it became more stable after 0.2 sec. An overshoot has occurred on all fingers but stayed in limit of 0.05N where system has automatically adjusted at the next collection. These small overshoots occurred because different parts of the fingers get into contact with the object before the object actually gets into contact with the force sensor. This results bending of fingers slower when phalanges touches the object. Since the can of soft drink does not deform itself, it can be deduced that the grasping control is both fast and accurate when the Ambidextrous Hand is driven by PID loops. IMPLEMENTATION OF A BANG-BANG CONTROLLER The bang-bang controller allows all fingers to grasp the object without taking any temporal parameters into account. Execution of algorithm automatically stops when the target set against force is achieved. The controller also looks after any overshooting issue if it may arise. To compensate the absence of backward control, a further condition is implemented in addition to initial requirements. Since the force applied by the four fingers is controlled with less accuracy than with PID loops, the thumb must offset the possible excess of force to balance the grasping of the object. Therefore, a balancing equation is defined as: 4 𝐹𝑡𝑚𝑖𝑛 = 𝑊𝑜 + ∑ 𝐹𝑓 (5) As discussed in section III, the phalanges must close with appropriate speed’s ratios to tighten around objects when interacting with object. By repeating the experiments realized in section III, the pictures obtained with the bang-bang controller are provided in Fig.8. This time, it is noticeable from (a) that the can of soft drink deforms itself when it is grasped on the left hand side. The graph obtained from the data collection of the left mode are provided in Fig. 9. 1.5 Force (N) IV. 𝑓=1 Where 𝐹𝑡𝑚𝑖𝑛 is the minimum force applied by the thumb, 𝐹𝑓 is the force applied by each of the four other fingers. 𝑊𝑜 is an approximate weight of the object to grabbed. In the case of light weight objects, since weight is not very much of importance but should be defined anything more than 25N. Equation (5) is only suitable for light weight objects. In order to be more accurate, a mathematical model ∑4𝑓=1 𝑊𝑓 that counts the weight of all four fingers is preferable. Moreover, as the summation of 𝑊𝑓 is close to 7 N, it does not interfere either with heavier objects, which is why 𝑊𝑓 is not included in (5). Fig. 7. Bang-bang loops driven by proportional controllers. 1.4 Forefinger 1.3 Middle finger 1.2 1.1 Ring finger 1 Little finger 0.9 0.1 0.15 0.2 0.25 Time (sec) 0.3 Fig. 9. Graph shows force against time of the four fingers while grasping a drink can with bang-bang controllers. It is noted during experiment that speed of fingers does not vary when it touches the objects. That explains why we got higher curves in Fig.9 than the previously obtained in Fig.6. This makes bang-bang controller faster than PID loops. The bang-bang controllers also stop when the value of 1 N is overreached but, without predicting the approach to the setpoint, the process variables have huge overshoots. The overshoot is mainly visible for the middle finger, which overreaches the setpoint by more than 50%. Even though backward control is not implemented in the bang-bang controller, it is seen the force applied by some fingers decreases after 0.2 sec. This is due to the deformation of the can, which reduces the force applied on the fingers. It is also noticed that the force applied by some fingers increase after 0.25 sec, whereas the force was decreasing between 0.2 and 0.25 sec. This is due to thumb’s adduction that varies from 7.45 to 15.30 N from 0.1 to 0.25 sec. Even though the fingers do not tighten anymore around the object at this point, the adduction of the thumb applies an opposite force that increases the forces collected by the sensors. The increase is mainly visible for the forefinger and the middle finger, which are the closest ones from the thumb. Contrary to PID loops, it is seen in Fig.9 that the force applied by some fingers may not change between 0.15 and 0.2 sec, which indicates the grasping stability is reached faster with bang-bang controllers. The bang-bang controllers can consequently be applied for heavy objects, changing the setpoint of 𝐹𝑓 defined in (5). V. Fig. 8. The Ambidextrous Robot Hand holding a can with a grasping movement implemented with bang-bang controllers. It is seen the can has deformed itself. IMPLEMENTATION OF A BACKSTEPPING CONTROLLER BSC consists in comparing the system’s evolution to stabilizing functions. Derivative control is recursively applied until the fingers reach the conditions implemented in the control loops. First, the tracking error 𝑒1 (𝑡) of the BS approach is defined as: [ 𝐹𝑡 − 𝐹𝑓 (𝑡) 𝑒1 (𝑡) ]=[ ] 𝑒̇1 (𝑡) −𝐹𝑓̇ (𝑡) 𝑉2̇ (𝑒1 , 𝑒2 ) = 𝑒̇1 (𝑡) ∗ (𝑒1 (𝑡) + 𝑘𝑒̈1 (𝑡)) (12) (6) where 𝐹𝑡 is the force put as target and 𝐹𝑓 (𝑡) is the force received for each finger. The stability of this close loop system is then evaluated using a first Lyapunov function defined as: 1 2 𝑒 (𝑡) < 𝐹𝑔𝑚𝑖𝑛 2 1 𝑉1̇ (𝑒1 ) = 𝑒1 (𝑡) ∗ 𝑒̇1 (𝑡) = −𝐹𝑓̇ (𝑡) ∗ 𝑒1 (𝑡) 𝑉1 (𝑒1 ) = (7) (8) The force provided by the hand is assumed not being strong enough as long as 𝑒12 /2 exceeds a minimum grasping force defined as 𝐹𝑔𝑚𝑖𝑛 . In (8), it is noted that 𝑒̇1 (𝑡) ≠ 0 as long as 𝐹𝑓 (𝑡) keeps varying. Therefore, 𝑉1̇ (𝑒1 ) cannot be stabilized until the system stops moving. Thus, a stabilizing function is introduced. This stabilizing function is noted as a second error 𝑒2 (𝑡): 𝑒2 (𝑡) = 𝑘 ∗ 𝑒̇1 (𝑡) (9) Fig. 11. Ambidextrous hand grasping a can of soft drink using backstepping controllers (Right hand mode and left hand mode). The block diagram of backstepping process is illustrated in Fig.10. According to the force feedback 𝐹𝑓 (𝑡), the fingers’ positions adapt themselves until the conditions of the Lyapunov functions (𝑉1, 𝑉1̇ ) and (𝑉2, 𝑉2̇ ) are reached. 1.1 Forefinger 1 Middlefing er Force (N) 0.9 0.8 Ring finger 0.7 Little finger 0.6 Fig. 10. Basic Backstepping controller is shown in above figure.. with 𝑘 a constant > 1. 𝑒2 (𝑡) indirectly depends on the speed, as the system cannot stabilized itself as long as the speed is varying. Consequently, both the speed of the system and 𝑒2 (𝑡) are equal to zero when one finger reaches a stable position, even if 𝐹𝑓 (𝑡) ≠ 𝐹𝑡 . 𝑘 aims at increasing 𝑒̇1 (𝑡) to anticipate the kinematic moment when 𝑒̇1 (𝑡) becomes too low. In that case, the BSC must stop running as 𝐹𝑓 (𝑡) is close to 𝐹𝑡 . Both of the errors are considered in a second Lyapunov function: 1 𝑉2 (𝑒1 , 𝑒2 ) = (𝑒12 (𝑡) + 𝑒22 (𝑡)) < 𝐹𝑠 2 (10) 𝑉2̇ (𝑒1 , 𝑒2 ) = 𝑒1 (𝑡) ∗ 𝑒̇1 (𝑡) + 𝑒2 (𝑡) ∗ 𝑒̇2 (𝑡) (11) where 𝐹𝑠 refers to a stable force applied on the object. This second step allows stabilizing the system using derivative control. Using (9), (11) can be simplified as: 0.1 0.15 0.2 0.25 0.3 0.35 0.4 Time (s) Fig. 12. Graph shows force against time of the four fingers while grasping a drink can with Backstepping controllers. The grasping features obtained with the BSC are illustrated in Fig.11. The force against time graph is obtained from the data collection is shown in Fig.12. During the experiment, it was noticed that speed of finger tightening using backstepping control was much slower compared to PID controller and bang-bang controller. Since the backstepping controller’s target is based on force feedback and speed stability, it offers greater flexibility than PID and bang-bang but takes longer to stablise. Finger provided enough force to grab the can of soft drink at 0.30 sec, but it is seen the system carries on moving until 0.40 sec. Therefore it was dedcused that BSC takes longer to stablise. The force collected for the thumb at the end of the experiment is 13.10 N, which is a value close to the one obtained with the PID control. It can also be noted that the fingers’ speed is slower using BSC, as none of the sensors collect more than 0.80 N after 0.15 sec. The higher speeds of the PID and bang-bang controllers are respectively explained because of the integrative term and the lack of derivative control. Even though bang-bang control is the fastest of the three compared algorithms, it is not smooth enough to adapt itself to the shape of the objects and can crush them. The shooting function of the bang-bang controller is too sudden without additional controllers, which is why it is cascaded in [110] and [111]. However, bang-bang control can be used to grab heavy object. The higher is the PAMs’ pressure, the slower the PAMs contract, which is why their elasticity automatically opposes itself to the shooting function effect in that case. Fig. 13. Ambidextrous Robot hand holding water bottle and ball. VI. EXPERIMENTAL ANALYSIS A table has been constructed outlining the key difference found from the results of all three controllers.It can be seen from Table 1 that the best performances are reached with PID and BS controls, as both of them are accurate and permit the fingers to adapt to the shape of objects with backward movements. However, PID loops proved faster than any other controller, which could be one of the main reason of finding high number of resources in literature review. Fig. 14. fashion. Despite its accurate implementation, the BSC did not reveal as robust results. The fingers stabilize themselves after 0.35 sec with BSC, against 0.20 sec for PID and bang-bang controls. Indeed, as for sliding mode control (SMC), the main advantage of BSC is its ability to regulate nonlinear actuators. This is the reason why these two algorithms receive feedbacks from pressure or position sensors in [108] and [109]. Nevertheless, in the case considered in this paper, the feedback is received from force sensors directly implemented on the mechanical structure instead of the actuators themselves. Three different controllers namely PID, Bang-bang and BSC are tested and their performance in controlling an ambidextrous robotic hand is analyzed in great detail. PID controller was found the best when applied as compare to Bang-bang and Backstepping control. Backstepping control technique was validated for the first time on an ambidextrous robot hand. By combining PID controllers and force sensors, this research proposes one of the cheapest solutions possible. In future, PID controller could be used with artificial intelligent controllers to further improve the controls. Speed Accuracy Adaptability PID Fast High High Fast Bangbang BSC Fast Low Low Fast Average High High Long Fast High High Fast Ambidextrous Robot hand grabbing a can in ambidextrous By implementing force sensors both on right and left sides of the fingers, the Ambidextrous Hand can also grab objects in atypical positions, as shown in Fig 14. CONCLUSION Implementation ACKNOWLEDGMENT Ideal Option Table 1 : Comparison between PID, bang-bang and backstepping controls and an ideal condition. The authors would like to cordially thank Anthony Huynh, Luke Steele, Michal Simko, Luke Kavanagh and Alisdair Nimmo for their contributions in design and development of the mechanical structure of a hand, and without whom the research introduced in this paper would not have been possible. REFERENCES [24] R. Ortega and M. Spong, Adaptive control, Elsevier, 1989. [1] [2] R. K. Miller, "Robots in Industry," in Industrial Robot Handbook, VNR [25] J. H. Lilly, "Adaptive tracking for pneumatic muscle actuators in bicep and Competitive Manufacturing Series ed., Springer US, 1989, pp. 1- 9. tricep configurations," IEEE Trans. Neural Syst. Rehabil., vol. 11, no. 3, pp. 333-339, 2003. M. Edwards, "Robots in industry: An overview," Applied [26] S. W. Chan, J. H. Lilly, D. W. Repperger and J. E. Berlin, "Fuzzy PD+I learning control for a pneumatic muscle," in Proc. 12th IEEE Int. Conference "History of robots," The Wikipedia, the free encyclopedia, 13 11 2014. FUZZ System, 2003. [Online]. Available: http://en.wikipedia.org/wiki/History_of_robots. [27] J. S. Albus, A. J. Barbera and R. N.Nagel, "Theory and Practice of [Accessed 28 11 2014]. Hierarchical Control," 1980. [Online]. Available: robotictechnologyinc.com. Y. Koren, Robotics for engineers, McGraw- Hill Book Company, 1985. Ergonomics,Elsevier, vol. 15, no. 1, pp. 45-53, March 1984. [3] [4] [5] [6] [7] [8] P. Kopacek, "Advances in Robotics," Springer-Verlag Berlin Heidelberg , pp. [28] H. H. Pattee, "The Physical Basis and Origin of Hierarchical Control," in Laws, Language and Life, vol. 7, Netherlands, Springer Netherlands, 2012, 549-558, 2005. pp. 91-110. G. N. Saridis, "Intelligent robotic control," Automatic Control, IEEE [29] H. Li, K. Kawashima, K. Tadano, S. Ganguly and S. Nakano, "Achieving Transactions, vol. 28, no. 5, pp. 547-557, 1983. haptic perception in forceps manipulator using pneumatic artificial muscle," L. Marchal-Crespo and D. J. Reinkensmeyer, "Review of control strategies IEEE/ASME Trans. Mechatronics, vol. 18, no. 1, pp. 74-85, 2013. for robotic movement training after neurologic injury," Journal of [30] M. M. Gupta, Intelligent control system, IEEE, 1996. NeuroEngineering and Rehabilitation, vol. 6, no. 1, 2009. [31] O. Omidvar and D. L. Elliott, Neural systems for control, Elsevier, 1997. T. C. Hsia, "Adaptive control of robot manipulators - A review," in Proceedings of IEEE International Conference on Robotics and Automation, [32] T. Hesselroth, K. Sarkar, P. V. d. Smagt and K. Schulten, "Neural network control of a pneumatic robot arm," in IEEE Trans. Syst. Man Cybern, 1994. USA, 1986. [9] K. Hashimoto, "A review on vision-based control of robot manipulators," [33] T. Kosaki and M. Sano, "Control of pneumatic artificial muscles with the justAdvanced Robotics,, vol. 17, no. 10, pp. 969-991, 2003. in-time method based on a client-server architecture via the Internet," in IEEE International Conference on Automation Science and Engineering (CASE), [10] C. T. Abdallah, D. Dawson, P. Dorato and M. Jamshidi, "Survey of robust Seoul, South Korea, 2012. control for rigid robots," Control Systems Magazine, vol. 11, no. 2, pp. 24-30, 1991. [34] A. Gelman, J. B. Carlin, H. S. Stern, D. B. Dunson, A. Vehtari and D. B. Rubin, Bayesian data analysis, CRC press, 2013. [11] S. Lorenzo and B. Siciliano, Modelling and Control of Robot Manipulators 2nd Edition, Springer, 2000. [35] Y. Ariga, H. T. T. Pham, M. Uemura, H. Hirai and F. Miyazaki, "Novel equilibrium-point control of agonist-antagonist system with pneumatic [12] H. I. Ali, S. B. B. M. Noor, S. M. Bashi and M. H. Marhaban, "A Review of artificial muscles," in Proc. IEEE ICRA, Saint Paul, MN, USA,, 2012. Pneumatic Actuators (Modeling and Control)," Australian Journal of Basic and Applied Sciences, vol. 3, no. 2, pp. 440-454, 2009. [36] T. J. Ross, Fuzzy logic with engineering applications, John Wiley & Sons, 2009. [13] L. M. Aníbal Ollero, "Control and perception techniques for aerial robotics," [37] L. A. Zadeh, "Fuzzy logic, neural networks, and soft computing," Annual Reviews in Control, Elsevier, vol. 28, no. 2, pp. 167-178, 2004. Communications of the ACM , vol. 37, no. 3, pp. 77-84, 1994. [14] J. L. Shearer, "Study of Pneumatic Process in the Continuous Control of Motion With Compressed Air," Transactions of the ASME, pp. 233-249, [38] G. Klir and B. Yuan, Fuzzy sets and fuzzy logic, New Jersey: Prentice Hall, 1995. 1956. [15] A. Deshpande, J. Ko, D. Fox and Y. Matsuoka., "Anatomically Correct [39] X. Chang and J. H. Lilly, "Fuzzy control for pneumatic muscle tracking via Testbed Hand Control: Muscle and Joint Control Strategies," in IEEE evolutionary tuning," in Intelligent Automation & Soft Computing, 2003. International Conference on Robotics and Automation, 2009. [40] K. Balasubramanian and K. S. Rattan., "Fuzzy logic control of a pneumatic [16] "Shadow Dexterous Hand E1M3R, E1M3L," Shadow Robot Company Ltd., muscle system using a linearing control scheme," in Fuzzy Information 2013. [Online]. Available: http://www.shadowrobot.com/products/dexterousProcessing Society, 22nd International Conference of the North American. IEEE, 2003. hand/. [Accessed 03 12 2014]. [17] J. Wang, "Accurate position control of servo pneumatic actuator systems:an [41] P. Domingos, "A few useful things to know about machine learning," application to food packaging," Control Engineering Practice, vol. 7, pp. 699Communications of the ACM , vol. 55, no. 10, pp. 78-87, 2012. 706, 1999. [42] D.-X. Zhou, Q. Wu and Y. Ying., "Learning Theory," Hindawi Publishing [18] H.-S. Choi, ""Development of hybrid robot for construction works with Corporation, USA, 2014. pneumatic actuator," Automation in Construction, vol. 14, pp. 452-459, 2005. [43] K. De Jong, "Evolutionary computation: a unified approach," in In Proceedings of the 2014 conference companion on Genetic and evolutionary [19] B. Verrelst, B. Vanderborght, R. V. Ham, P. Beyl and D. Lefeber, "Novel Robotic Applications using Adaptable Compliant Actuation. An computation companion, ACM, 2014. Implementation Towards Reduction of Energy Consumption for Legged [44] G. Kendall, "Evolutionary Computation in the Real World: Successes and Robots," Mobile Robots, Moving Intelligence, pp. 514-534, 2006. Challenges," Knowledge and Systems Engineering. Springer International [20] Y. Shaojuan, "A New Iterative Learning Controller for Electro-Pneumatic Publishing, p. 5, 2014. Servo System," in ISDA '08. Eighth International Conference on Intelligent [45] J. J. Grefenstette, Proceedings of the First International Conference on Systems Design and Applications, 2008. Genetic Algorithms and their Applications, Psychology Press, 2014, 2014. [21] "Control theory,Main control strategies," The Wikipedia, the free [46] C. D. Lin, C. M. Anderson‐Cook, M. S. Hamada, L. M. Moore and R. R. encyclopedia, 09 11 2014. [Online]. Available: Sitter., "Using Genetic Algorithms to Design Experiments: A Review," http://en.wikipedia.org/wiki/Control_theory. [Accessed 28 11 2014]. Quality and Reliability Engineering International, 2014. [22] G. Andrikopoulos, G. Nikolakopoulos, I. Arvanitakis and S. Manesis, [47] D. B. Reynolds, D. W. Repperger, C. A. Phillips and G. Bandry, "Modeling "Piecewise Affine Modeling and Constrained Optimal Control for a the dynamic characteristics of pneumatic muscle," Ann. Biomed. Eng, vol. 31, Pneumatic Artificial Muscle," IEEE Transactions on Industrial Electronics, no. 3, pp. 310-317, 2003. vol. 61, no. 2, pp. 904-916, 2014. [48] F. L. Lewis, D. Vrabie and V. L. Syrmos., Optimal control, Wiley & Sons,, [23] K. J. Åström and B. Wittenmark, Adaptive Control Second Edition, USA: 2012. Courier Dover Publications, 2008. [49] D. E. Kirk, Optimal control theory: an introduction, Courier Dover Publications, 2012. [50] R. Vinter, Optimal control, Springer, 2010. International Conference on Robotics and Automation, , pp. 4416-4422. , 2009. [51] K. J. Åström, Introduction to stochastic control theory, Courier Dover [71] N. Tsujiuchi, T. Koizumi, H. Kan, H. Takeda, T. Kudawara and M. Hirano, "Modeling and control of a joint driven by pneumatic actuator," in Industrial Publications, 2012. Electronics IECON '09. 35th Annual Conference of IEEE, 2009. [52] D. W. Repperger, K. R. Johnson and C. A. Phillips, "A VSC position tracking [72] X. Jiang, C. Xiong, R. Sun and Y. Xiong, "Characteristics of the Robotic Arm system involving a large scale pneumatic muscle actuator," in Proc. 37th of a 9-DoF Upper Limb Rehabilitation Robot Powered by Pneumatic IEEE Conf. Decision Control, 1998. Muscles," ICIRA, vol. LNAI 6425, pp. 463-474, 2010. [53] T.-Y. Choi and J.-J. Lee., "Control of manipulator using pneumatic muscles [73] S. Nishino, N. Tsujiuchi, T. Koizumi, H. Komatsubara, T. Kudawara and M. for enhanced safety," IEEE Trans. Ind. Electron, vol. 57, no. 8, pp. 2815Shimizu, "Development of Robot Hand with Pneumatic Actuator and 2825, 2010. Construct of Master Slave System," in Proceedings of the 29th Annual [54] Navarro-Alarcon, P. L. David and H. M. Yip., "Energy shaping control for International Conference of the IEEE EMBS, 2007. robot manipulators in explicit force regulation tasks with elastic [74] N. Tsujiuchi, T. Koizumi, S. Nishino, H. Komatsubara, T. Kudawara and M. environments," in IEEE/RSJ International Conference Intelligent Robots and Hirano, "Development of Pneumatic Robot Hand and Construction of MasterSystems (IROS), 2011. Slave System," Journal of System Design and Dynamics, vol. 2, no. 6, pp. [55] D. W. Repperger, C. A. Phillips and M. Krier, "Controller design involvng 1306-1315, 2008. gain scheduling for a large scale pneumatic muscle actuator," in IEEE Int. [75] J. Wang, J. Pu and P. Moore., "Accurate position control of servo pneumatic Conf. Control Application, 1999. actuatorsystems: an application to food packaging," Control Engineering [56] A. Harald and D. Schindele, "Sliding-mode control of a high-speed linear axis Practice, vol. 7, pp. 699-706, 1999. driven by pneumatic muscle actuators," IEEE Trans. Ind. Electron, vol. 55, [76] K. K. Ahn and H. P. H. Anh., "Design & Implementation an Adaptive Takagino. 11, pp. 3855-3864, 2008. Sugeno Fuzzy Neural Networks Controller for the 2-Links Pneumatic [57] M. Van Damme, B. Vanderborght, B. Verrelst, R. V. Ham, F. Daerden and D. Artificial Muscle(PAM) Manipulator using in Elbow Rehabilitation," in First Lefeber, "Proxy-based sliding mode control of a planar pneumatic International Conference on Communications and Electronics, 2006. manipulator," Int. J. Robot. Res, vol. 28, no. 2, pp. 266-284, 2009. [77] J. H. J. Wu, Y. Wang and K. Xing., "RLS-ESN based PID control for [58] E. Akyürek, T. Kalganova, M. Mukhtar, L. Paramonov, L. Steele, M. Simko, rehabilitation robotic arms driven by PM-TS actuators," in The 2010 L. Kavanagh, A. Nimmo, A. Huynh and Stelarc, "A novel design process of International Conference on Modelling, Identification and Control (ICMIC), low cost 3D printed ambidextrous finger designed for an ambidextrous 2010. robotic hand" in WSEAS Transactions on Circuits and Systems, ISSN / E[78] H. P. H. Anh and K. K. Ahn, "Hybrid control of a pneumatic artificial muscle ISSN: 1109-2734 / 2224-266X, Volume 14, 2015, Art. #55, pp. 475-488. (PAM) robot arm using an inverse NARX fuzzy model," Journal Engineering [59] A. Visioli, Practical PID control, Springer, 2006. Applications of Artificial Intelligence, vol. 24, no. 4, pp. 697-716, 2011. [60] P. Srl, "The EH1 Milano Hand," 2010. [Online]. Available: [79] G. Xiang and J. Zheng, "Design study of an adaptive fuzzy-PD controller for http://www.prensilia.com/index.php?q=en/node/41.. pneumatic servo system," Control Engineering Practice, vol. 13, pp. 55-65, [61] I. W. Laboratory, "High-speed robot hand," 2009. [Online]. Available: http://www.k2.t.u-tokyo.ac.jp/fusion/HighspeedHand/. . [80] [62] D. Gunji, Y. Mizoguchi, S. Teshigawara, A. Ming, A. Namiki, M. Ishikawaand and M. Shimojo, "Grasping Force Control of Multi-Fingered Robot Hand based on Slip Detection Using Tactile Sensor," in IEEE [81] International Conference on Robotics and Automation (ICRA), , pp. 26052610., 2008. 2005. D. Tu and K. Kyoung, "Nonlinear PID control to improve the control performance of 2 axes pneumatic artificial muscle manipulator using neural network," Mechatronics, vol. 16, pp. 577-587, 2006. T. Yanbing and W.Xiaoxin, "Parameter self-tuning of PID in pneumatic artificial muscle joint based on PSO algorithm," in 29th Chinese Control Conference (CCC), 2010. [63] L. Zollo, S. Roccella, E. Guglielmelli, M. C. Carrozza and P. Dario, [82] R. V. Ham, B. Verrelst, F. Daerden and D. Lefeber, "Pressure Control with "Biomechatronic Design and Control of an Anthropomorphic Artificial Hand On-Off Valves of Pleated Pneumatic Artificial Muscles in a Modular Onefor Prosthetic and Robotic Applications," IEEE/ASME Transactions on Dimensional Rotational Joint," in International Conference on Humanoid Mechatronics, vol. 12, no. 4, pp. 418-429. , 2007. Robots, 2003. [64] S. R. C. L. (2013b), " Shadow Dexterous Hand (2013b) E1P1R, E1P1L," [83] B. Vanderborght, B. Verrelst, R. V. Ham, J. Vermeulen and D. Lefeber, 2013. [Online]. Available: http://www.shadowrobot.com/products/dexterous"Dynamic Control of a Bipedal Walking Robot actuated with Pneumatic hand/. . Artificial Muscles," in Proceedings of the 2005 IEEE International [65] P. Chua, M. Bezdicek, S. Davis, D. Caldwell and J. 0. Gray, "Tele-Operated Conference on Robotics and Automation, 2005. High Speed Anthropomorphic Dextrous Hands with Object Shape and [84] B. Vanderborght, B. Verrelst, R. V. Ham, M. V. Damme and D. Lefeber, "A Texture Identification," Intelligent Robots and Systems, 2006 IEEE/RSJ pneumatic biped: experimental walking results and compliance adaptation International Conference on, , pp. 4018-4023. . experiments," in 5th IEEE-RAS International Conference on Humanoid [66] N. Tsujiuchi, T. Koizumi, S. Nishino, H. Komatsubara, T. Kudawara and M. Robots, 2005. Hirano, "Development of Pneumatic Robot Hand and Construction of Master- [85] B. Vanderborght, B. Verrelst, R. V. Ham, M. V. Damme, P. Beyl and D. Slave System," Journal of System Design and Dynamics, vol. 2, no. 6, pp. Lefeber, "Torque and compliance control of the pneumatic artificial muscles 1306-1315, 2008. in the biped "Lucy"," in Proceedings 2006 IEEE International Conference on [67] T. Yoshikawa, M. Koeda and H. Fujimoto, "Shape Recognition and Optimal Robotics and Automation, 2006. Grasping of Unknown Objects by Soft-Fingered Robotic Hands with [86] G. Andrikopoulos, G. Nikolakopoulos and S. Manesis, "Advanced Non-linear Camera," Experimental Robotics Springer Tracts in Advanced Robotics, vol. PID Based Antagonistic Control for Pneumatic Muscle Actuators," IEEE 54, pp. 537-546 , 2009. Transactions on Industrial Electronics, pp. 1-12. [68] C.-P. Chou and B. Hannaford, "Measurement and Modelling of McKibben [87] H. P. H. Anh and K. K. Ahn, "Hybrid control of a pneumatic artificial muscle Pneumatic Artificial Muscles," IEEE Transactions on Robotics and (PAM) robot arm using an inverse NARX fuzzy model," Engineering Automation, vol. 12, no. 1, pp. 90-102, 1996. Applications of Artificial Intelligence, vol. 24, no. 4, pp. 697-716. [69] E. Kelasidi, G. Andrikopoulos, G. Nikolakopoulos and S. Manesis, "A Survey [88] "Bang–bang control," Wikipedia, the free encyclopedia, 16 10 2014. [Online]. on Pneumatic Muscle Actuators Modeling," Journal of Energy and Power Available: http://en.wikipedia.org/wiki/Bang%E2%80%93bang_control. Engineering, vol. 6, pp. 1442-1452. , 2012. [Accessed 05 12 2014]. [70] A. D. Deshpande, J. Ko, D. Fox and Y. Matsuoka, "Anatomically Correct [89] N. P. Osmolovskii and H. Maurer, Applications to Regular and Bang-Bang Testbed Hand Control: Muscle and Joint Control Strategies," in IEEE Control: Second-Order Necessary and Sufficient Optimality Conditions in [109] H. Aschemann and D. Schindele, "Nonlinear Model-Based Control of a Calculus of Variations and Optimal Control, Advances in Design and Control Parallel Robot Driven by Pneumatic Muscle Actuators," New approaches in Series, 2012. Automation and Robotics, ed. Harald Aschemann, I-Tech Education and Publishing, 2008. [90] C. Silva and E. Trélat., "Smooth Regularization of Bang-Bang Optimal Control Problems," IEEE Transactions on Automatic Control, vol. 55, no. 11, [110] B. V. Bram Vanderborght, R. V. Ham, J. Vermeulen and D. Lefebe, pp. 2488-2499, 2010. "Dynamic Control of a Bipedal Walking Robot actuated with Pneumatic Artificial Muscles," Robotics and Automation, 2005. ICRA 2005. Proceedings [91] B. Bonnard, J. Caillau and E. Trélat, "Second order optimality conditions in of the 2005 IEEE International conference, pp. 1-6, 2005. the smooth case and applications in optimal control," ESAIM: Control, Optimisation and Calculus of Variations, vol. 13, no. 2, pp. 207-236, 2007. [92] F. Nagi, L. Perumal and J. Nagi, "A new integrated fuzzy bang–bang relay control system," Mechatronics, vol. 19, no. 5, pp. 748-760, 2009. [93] F. Nagi, A. T. Zulkarnain and J. Nagi., "Tuning fuzzy Bang–bang relay controller for satellite attitude control system," Aerospace Science and Technology , vol. 26, no. 1, pp. 76-86, 2013. [94] B. Verrelst, B. Vanderborght, J. Vermeulen, R. V. Ham, J. Naudet and D. Lefeber, "Control architecture for the pneumatically actuated dynamic walking biped “Lucy”," Mechatronics, vol. 15, no. 6, pp. 703-729, 2005. [95] B. Vanderborght, B. Verrelst, R. V. Ham and D. Lefeber, "Controlling a bipedal walking robot actuated by pleated pneumatic artificial muscles," Robotica , vol. 24, no. 4, pp. 401-410, 2006. [96] Vanderborght, Bram, R. V. Ham, B. Verrelst, M. V. Damme and D. Lefeber, "Overview of the lucy project: Dynamic stabilization of a biped powered by pneumatic artificial muscles," Advanced Robotics , vol. 22, no. 10, pp. 10271051, 2008. [97] S. M. Cain, K. E. Gordon and D. P. Ferris., "Locomotor adaptation to a powered ankle-foot orthosis depends on control method," Journal of NeuroEngineering and Rehabilitation, vol. 48, no. 4, 2007. [98] D. Shin, I. Sardellitti and O. Khatib, "A hybrid actuation approach for humanfriendly robot design," in IEEE International Conference In Robotics and Automation ICRA 2008, 2008. [99] M. Zinn, O. Khatib, B. Roth and J. Salisbury., "Towards a human centered intrinsically-safe robotic manipulator," In Proc. of IARP/IEEERAS Joint Workshop Toulouse, France, 2002. [100] J.-F. Zhang, C.-J. Yang, Y. Chen, Y. Zhang and Y.-M. Dong., "Modeling and control of a curved pneumatic muscle actuator for wearable elbow exoskeleton," Mechatronics , vol. 18, no. 8, pp. 448-457, 2008. [101] H. X. Zhang, Wei Wang and J. W. Zhang., "High stiffness pneumatic actuating scheme and improved position control strategy realization of a pneumatic climbing robot," in IEEE International Conference on Robotics and Biomimetics, 2009. [102] J. G. C. Alva, E. C. M. Sanchez, M. A. Meggiolaro and J. T. P. d. Castro., "Development of a Fatigue Testing Machine using a Pneumatic Artifical Muscle," in 22nd International Congress of Mechanical Engineering, 2013. [103] S. Mohamed, B. Xavier and T. Daniel, "Systematic control of an electropneumatic system: integrator backstepping and sliding mode control," IEEE. Transactions on Control Systems Technology, vol. 14, no. 5, 2006. [104] P. Carbonell, Z. Jiang and D. Repperger., "Nonlinear control of a pneumatic muscle actuator: backstepping vs. sliding-mode," in IEEE International Conference on Control Applications, 2001. (CCA '01), pp. 167-172., 2001. [105] P. Carbonell, Z. Jiang and D. W. Repperger., "A fuzzy backstepping controller for a pneumatic muscle actuator system," in IEEE International Symposium on Intelligent Control, 2001. (ISIC '01), pp. 353-358, 2001. [106] M. Soltanpour and M. Fateh., "Sliding Mode Robust Control of Robot Manipulator in the Task Space by Support of Feedback Linearization and BackStepping Control," World Applied Sciences Journal, vol. 6, no. 1, pp. 7076., 2009. [107] E. Akyürek, T. Kalganova, M. Mukhtar, L. Paramonov, L. Steele, M. Simko, L. Kavanagh, A. Nimmo, A. Huynh and Stelarc, "Design and Development of Low Cost 3D Printed Ambidextrous Robotic Hand Driven by Pneumatic Muscles", International Journal of Engineering and Technical Research (IJETR) ISSN: 2321-0869, Volume-2, Issue-10, October 2014. [108] P. Carbonell, Z. P. Jiang and D. W. Repperger, "Nonlinear control of a pneumatic muscle actuator: backstepping vs. sliding-mode," Control Applications, 2001. (CCA '01).Proceedings of the 2001 IEEE International Conference on, , pp. 167-172. , 2001. [111] B. Vanderborght, B. Verrelst, R. V. Ham, M. V. Damme, P. Beyl and D. Lefeber, "Torque and compliance control of the pneumatic artificial muscles in the biped "Lucy""," Robotics and Automation, 2006. ICRA 2006. Proceedings 2006 International Conference, pp. 842-847, 2006.