1 - Electrical and Computer Engineering

CprE 281:
Digital Logic
Instructor: Alexander Stoytchev http://www.ece.iastate.edu/~alexs/classes/
Simple Processor
CprE 281: Digital Logic
Iowa State University, Ames, IA
Copyright © Alexander Stoytchev
Administrative Stuff
• Final Project (7% of your grade)
• Posted on the class web page (Labs section)
• This is due this week (during your lab)
Administrative Stuff
• The FINAL exam is scheduled for
• Thursday May 8 @ 2:15-4:15 PM
• It will be in this room.
Final Exam Format
• The exam will cover: Chapter 1 to Chapter 6, and
Sections 7.1-7.2
• Emphasis will be on Chapter 6 and Chapter 5
• The exam will be open book and open notes (you can bring up to 5 pages of handwritten notes) plus your textbook.
Final Exam Format
• The exam will be out of 130 points
• You need 95 points to get an A
• It will be great if you can score more than 100 points.
▪ but you can ’t roll over your extra points
Topics for the Final Exam
• K-maps for 2, 3, and 4 variables
• Multiplexers (circuits and function)
• Synthesis of logic functions using multiplexers
• Shannon ’s Expansion Theorem
• 1 ’s complement and 2’s complement representation
• Addition and subtraction of binary numbers
• Circuits for adding and subtracting
• Serial adder
• Latches (circuits, behavior, timing diagrams)
• Flip-Flops (circuits, behavior, timing diagrams)
• Counters
• Registers
Topics for the Final Exam
• Synchronous Sequential Circuits
• FSMs
• Moore Machine
• Mealy Machines
• State diagrams, state tables, state-assigned tables
• State minimization
• Designing a counter
• Arbiter Circuits
• Reverse engineering a circuit
• ASM Charts
• Register Machines
• Bus structure and Simple Processors
• Something from Star Wars
How to Study for the Final Exam
• Form a study group
• Go over the slides for this class
• Go over the problems at the end of Ch 5 & 6
• Exercise
• Get some sleep
Digital System
• Datapath circuit
▪ To store data
▪ To manipulate data
▪ To transfer data from one part of the system to another
▪ Comprise building blocks such as registers, shift registers, counters, multipliers, decoders, encoders, adders, etc.
• Control circuit
▪ Controls the operation of the datapath circuit
▪ Designed as a FSM
A Simple Processor
[ Figure 7.9 from the textbook ]
What are the components?
[ Figure 7.9 from the textbook ]
Register R0
[ Figure 7.9 from the textbook ]
All Registers
[ Figure 7.9 from the textbook ]
IN
1
0
1
2-Bit Register
OUT
1
IN
0
0
1
OUT
0
4-Bit parallel-access shift register
(this one is not used in this example)
[ Figure 5.18 from the textbook ]
Tri-State Driver
[ Figure 7.9 from the textbook ]
All Tri-State Drivers
[ Figure 7.9 from the textbook ]
Tri-state driver
(see Appendix B for more details)
[ Figure 7.1 from the textbook ]
Bus Structure
• A way to transfer data from any register (device) to any other register (device)
• A set of n wires to transfer an n-bit data n Bus
• What if two registers write to the bus at the same time?
Tri-State Driver
• Also called tri-state buffer Z: High impedance state
Figure 7.1. Tri-state driver.
device3 device2 device1
• Then several devices can be connected to a single wire
• Note that at any time, at most e3 one of e0, e1, e2, and e3 can e2 e1 be set to 1 device0 e0
An n-bit Tri-State Driver
• An n-bit tri-state buffer can be constructed using n
1-bit tri-state buffers.
Input e
Output e e e e
A digital system with k registers
[ Figure 7.2 from the textbook ]
How to connect registers to a bus
(using tri-state drivers)
This shows only two 2-bit registers, but this design scales to more and larger registers.
[ Figure 7.3 from the textbook ]
An alternative approach uses multiplexers to implement a bus
[ Figure 7.4 from the textbook ]
An alternative approach uses multiplexers to implement a bus
(eight 5-to-1 multiplexers)
This requires one multiplexer per bit.
Assuming 8-bit registers, we need eight 5-to-1 multiplexers.
[ Figure 7.4 from the textbook ]
Adder/Subtractor
[ Figure 7.9 from the textbook ]
c n x n – 1
Adder/subtractor unit y n – 1 y
1 y
0
Add
Sub control x
1 x
0 c
0 n -bit adder s
– 1 s
1 s
0
[ Figure 3.12 from the textbook ]
The first two stages of a carry-lookahead adder x
1 y
1 x
0 y
0 x
0 y
0 g
1 p
1 g
0 p
0 c
0 c
2 c
1
[ Figure 3.15 from the textbook ]
A hierarchical carry-lookahead adder x y x y x y
Block
3
G
3
P
3 s c
24
Block
1
G
1
P
1 s
Block
0
G
0
P
0 s c
0 c
32
Second-level lookahead c
16 c
8
[ Figure 3.17 from the textbook ]
Control Circuit
[ Figure 7.9 from the textbook ]
Designing The Control Circuit
The function register and decoders
I
0
I
1
I
2
I
3
X
0
X
1
X
2
X
3
Y
0
Y
1
Y
2
Y
3 y
0 y
1 y
2 y
3
2-to-4 decoder w
1 w
0
En y
0 y
1 y
2 y
3
2-to-4 decoder w
1 w
0
En y
0 y
1 y
2 y
3
2-to-4 decoder w
1 w
0
En
1 1 1
Clock
FR in
Function Register f
1 f
0
Rx
1
Rx
0
Ry
1
Ry
0
Function
[ Figure 7.11 from the textbook ]
Operations performed by this processor
Operation Function Performed
Load Rx, Data Rx Data
Move
Add
Sub
Rx, Ry
Rx, Ry
Rx, Ry
Rx [Ry]
Rx [Rx] + [Ry]
Rx [Rx] - [Ry]
[ Table 7.1 from the textbook ]
Operations performed by this processor
Operation Function Performed
Load Rx, Data Rx Data
Move
Add
Sub
Rx, Ry
Rx, Ry
Rx, Ry
Rx [Ry]
Rx [Rx] + [Ry]
Rx [Rx] - [Ry]
Where Rx and Ry can be one of four possible options: R0, R1, R2, and R3
[ Table 7.1 from the textbook ]
Operations performed by this processor f
1 f
0
Function
0 0 Load
0 1 Move
1 0 Add
1 1 Sub
Rx
1
0
0
1
1
Rx
0
Register
0 R0
1 R1
0 R2
1 R3
Ry
1
0
0
1
1
Ry
0
Register
0 R0
1 R1
0 R2
1 R3
Operations performed by this processor f
1 f
0
Function
0 0 Load
0 1 Move
1 0 Add
1 1 Sub
0 1 1 1 0 0 Move R3, R0
Rx
1
0
0
1
1
Rx
0
Register
0 R0
1 R1
0 R2
1 R3
Ry
1
0
0
1
1
Ry
0
Register
0 R0
1 R1
0 R2
1 R3
Operations performed by this processor f
1 f
0
Function
0 0 Load
0 1 Move
1 0 Add
1 1 Sub
1 0 0 1 1 1 Add R1, R3
Rx
1
0
0
1
1
Rx
0
Register
0 R0
1 R1
0 R2
1 R3
Ry
1
0
0
1
1
Ry
0
Register
0 R0
1 R1
0 R2
1 R3
Operations performed by this processor f
1 f
0
Function
0 0 Load
0 1 Move
1 0 Add
1 1 Sub
1 1 0 0 1 0 Sub R0, R2
Rx
1
0
0
1
1
Rx
0
Register
0 R0
1 R1
0 R2
1 R3
Ry
1
0
0
1
1
Ry
0
Register
0 R0
1 R1
0 R2
1 R3
Operations performed by this processor f
1 f
0
Function
0 0 Load
0 1 Move
1 0 Add
1 1 Sub
0 0 1 0 x x Load R2, Data
Rx
1
0
0
1
1
Rx
0
Register
0 R0
1 R1
0 R2
1 R3
Ry
1
0
0
1
1
Ry
0
Register
0 R0
1 R1
0 R2
1 R3
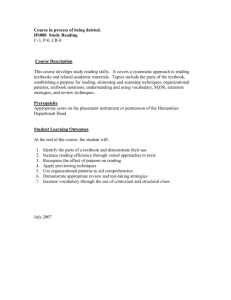
Similar Encoding is Used by Modern Chips
[http://en.wikipedia.org/wiki/Instruction_set]
Sample Assembly Language Program
For This Processor
Move R3, R0
Add R1, R3
Sub R0, R2
Load R2, Data
Machine Language vs Assembly Language
Machine Language
011100
100111
110010
001000
Assembly Language
Move R3, R0
Add R1, R3
Sub R0, R2
Load R2, Data
Meaning / Interpretation
R3 [R0]
R1 [R1] + [R3]
R0 [R0] – [R2]
R2 Data
Machine Language vs Assembly Language
Machine Language
01 11 00
10 01 11
11 00 10
00 10 00
Assembly Language
Move R3 , R0
Add R1 , R3
Sub R0 , R2
Load R2 , Data
Meaning / Interpretation
R3 [R0]
R1 [R1] + [R3]
R0 [R0] – [R2]
R2 Data
Machine Language vs Assembly Language
Machine Language
011100
100111
110010
001000
Assembly Language
Move R3, R0
Add R1, R3
Sub R0, R2
Load R2, Data
Meaning / Interpretation
R3 [R0]
R1 [R1] + [R3]
R0 [R0] – [R2]
R2 Data
For short, each line can be expresses as a hexadecimal number
Machine Language vs Assembly Language
Machine Language
1C
27
32
08
Assembly Language
Move R3, R0
Add R1, R3
Sub R0, R2
Load R2, Data
Meaning / Interpretation
R3 [R0]
R1 [R1] + [R3]
R0 [R0] – [R2]
R2 Data
Intel 8086
[http://en.wikipedia.org/wiki/Intel_8086]
Intel 8086
Memory Address
[http://en.wikipedia.org/wiki/Intel_8086]
Intel 8086
Machine
Language
[http://en.wikipedia.org/wiki/Intel_8086]
Intel 8086
Assembly
Language
[http://en.wikipedia.org/wiki/Intel_8086]
Intel 8086
Comments
[http://en.wikipedia.org/wiki/Intel_8086]
Control signals asserted in each time step
(Load): I
0
(Move): I
(Add): I
(Sub): I
1
2
3
T
1
Extern
R in
= X
Done
R in
R out
= X
= Y
Done
R out
A in
= X
R out
A in
= X
T
2
R out
G in
= Y
AddSub = 0
R out
G in
= Y
AddSub = 1
T
3
G out
R in
= X
Done
G out
R in
= X
Done
[ Table 7.2 from the textbook ]
Control signals asserted in each time step
(Load): I
0
(Move): I
(Add): I
(Sub): I
1
2
3
T
1
Extern
R in
= X
Done
R in
R out
= X
= Y
Done
R out
A in
= X
R out
A in
= X
T
2
R out
G in
= Y
AddSub = 0
R out
G in
= Y
AddSub = 1
T
3
1 clock cycle
1 clock cycle
G out
R in
= X
Done
G out
R in
= X
Done
3 clock cycles
3 clock cycles
[ Table 7.2 from the textbook ]
A part of the control circuit for the processor
Clock
Clear
T
0
T
1
T
2
T
3 y
0 y
1 y
2 y
3
2-to-4 decoder w
1 w
0
En
1
Q
1
Q
0
Up-counter
Reset
[ Figure 7.10 from the textbook ]
What are the components?
Clock
Clear
T
0
T
1
T
2
T
3 y
0 y
1 y
2 y
3
2-to-4 decoder w
1 w
0
En
1
Q
1
Q
0
Up-counter
Reset
[ Figure 7.10 from the textbook ]
Clock
Clear
2-Bit Up-Counter
T
0
T
1
T
2
T
3 y
0 y
1 y
2 y
3
2-to-4 decoder w
1 w
0
En
1
Q
1
Q
0
Up-counter
Reset
[ Figure 7.10 from the textbook ]
2-bit Synchronous Up-Counter
1
Clock
T Q
Q
Clear_n
T Q
Q
2-bit Synchronous Up-Counter with Enable
Enable
Clock
T Q
Q
Clear_n
T Q
Q
2-to-4 Decoder with Enable Input
Clock
Clear
T
0
T
1
T
2
T
3 y
0 y
1 y
2 y
3
2-to-4 decoder w
1 w
0
En
1
Q
1
Q
0
Up-counter
Reset
[ Figure 7.10 from the textbook ]
2-to-4 Decoder with an Enable Input
En
[ Figure 4.13c from the textbook ]
2-to-4 Decoder with an Enable Input
1
(always enabled in this example)
[ Figure 4.13c from the textbook ]
In Chapter 6 we looked at the following
Register Swap Example
Register Swap Controller
[ Figure 6.10 from the textbook ]
Register Swap Controller
Design a Moore machine control circuit for swapping the contents of registers R1 and R2 by using R3 as a temporary.
[ Figure 6.10 from the textbook ]
State Diagram w = 0
A: No Transfer w = 0 w = 1 w = 1
B : R 2 out
= 1 , R 3 in
= 1 w = 0 w = 1
C : R 1 out
= 1 , R 2 in
= 1 w = 0 w = 1
D : R 3 out
= 1 , R 1 in
= 1 , Done = 1
Reset
If an output is not given, then assume that it is 0.
[ Figure 6.11 from the textbook ]
Animated Register Swap
Animated Register Swap
0xFF
0x42
0xC9
These are the original values of the 8-bit registers
1
Animated Register Swap
0xFF
0x42
0xC9
For clarity, only inputs that are equal to 1 will be shown.
1
Animated Register Swap
1
0xFF
0x42
1 0xC9
1
Animated Register Swap
1
0xFF
0x42
0x42
1 0xC9
1
Animated Register Swap
1
0xFF
0x42
1 0x42
1
Animated Register Swap
1
0xFF
1 0x42
0x42
1
Animated Register Swap
1
0xFF
1 0x42
0x42
0xFF
1
Animated Register Swap
1
0xFF
1 0xFF
0x42
1
Animated Register Swap
1
0xFF
1
0xFF
0x42
1
Animated Register Swap
1
0xFF
1
0xFF
0x42
0x42
1
Animated Register Swap
1
0x42
1
0xFF
0x42
1
Animated Register Swap
0x42
0xFF
0x42
State Diagram w = 0
A: No Transfer w = 0 w = 1 w = 1
B : R 2 out
= 1 , R 3 in
= 1 w = 0 w = 1
C : R 1 out
= 1 , R 2 in
= 1 w = 0 w = 1
D : R 3 out
= 1 , R 1 in
= 1 , Done = 1
Reset
If an output is not given, then assume that it is 0.
[ Figure 6.11 from the textbook ]
Encoding #1:
A=00, B=01, C=10, D=11
(Uses Two Flip-Flops)
y
1 y
2 y
1 y
2 y
1 y
2
Present state y
2 y
1
A 00
B 01
C 10
D 11
Next state w = 0 w = 1
Y
2
Y
1
00
10
11
00
Y
2
Y
1
0 1
1 0
1 1
0 0
R1 out
0
0
1
0
R1 in
0
0
0
1
Outputs
R2 out
0
1
0
0
R2 in
0
0
1
0
R3 out
0
0
0
1
R3 in
0
1
0
0
Done
0
0
0
1
Encoding #3:
A=0001, B=0010, C=0100, D=1000
(One-Hot Encoding – Uses Four Flip-Flops)
Let's Complete the Circuit Diagram
R1 out
= R2 in
= y
3
R1 in
= R3 out
= Done = y
4
R2 out
= R3 in
= y
2
D Q
Q y
4
Y
3
D Q y
3
Q
D Q y
2
Q
Y
1
= w y
1
+ y
4
Y
2
= w y
1
Y
3
= y
2
Y
4
= y
3 w
Clock
D Q y
1
Q
Implementing the States with a Counter
Control signals asserted in each time step
(Load): I
0
(Move): I
(Add): I
(Sub): I
1
2
3
T
1
Extern
R in
= X
Done
R in
R out
= X
= Y
Done
R out
A in
= X
R out
A in
= X
T
2
R out
G in
= Y
AddSub = 0
R out
G in
= Y
AddSub = 1
T
3
G out
R in
= X
Done
G out
R in
= X
Done
[ Table 7.2 from the textbook ]
Derivation of the Control Inputs
• See pages 434- and 435 in the textbook
Arithmetic Logic Unit (ALU)
Arithmetic Logic Unit (ALU)
• Arithmetic Logic Unit (ALU) computes arithmetic or logic functions
• Example: A four-function ALU has two selection bits S1 S0
(also called OpCode) to specify the function
– 00 (ADD), 01 (SUB), 10 (AND), 11 (OR)
• Then the following set up will work
S1 S0 Function
0 0 ADD
0 1
1 0
1 1
SUB
AND
OR
A
B
ADD 00
A
A
B
A
B
A
B
SUB
AND
OR
01
MUX
10
11
S1 S0
Result
B
A
L
U
Result
S1 S0
(OpCode)
Symbol
An Alternative Design of Four-Function ALU
A
B
A
B
A
B
• The previous design is not very efficient as it uses an adder and a subtractor circuit
• We can design an add/subtract unit as discussed earlier
• Then we can design a logical unit (AND and OR) separately
• Then select appropriate output as result
• What are the control signals, Add/Sub, Select0, and Select1?
Add/Sub
ADD/SUB
AND
OR
0
MUX
1
0
MUX
1
Result
S1 S0 Function
0 0 ADD
0 1
1 0
1 1
SUB
AND
OR
Select0 Select1
A Digital System that Implements a Simple Processor
For this ALU,
A+B if AddSub=1
A-B if AddSub=0
[ Figure 7.9 from the textbook ]
Examples of Some Famous
Microprocessors
Intel's 4004 Chip
[http://en.wikipedia.org/wiki/Intel_4004]
Technical specifications
• Maximum clock speed was 740 kHz
• Instruction cycle time: 10.8 µs
(8 clock cycles / instruction cycle)
• Instruction execution time 1 or 2 instruction cycles
(10.8 or 21.6 µs), 46300 to 92600 instructions per second
• Built using 2,300 transistors
[http://en.wikipedia.org/wiki/Intel_4004]
Technical specifications
• Separate program and data storage.
• The 4004, with its need to keep pin count down, used a single multiplexed 4-bit bus for transferring:
▪ 12-bit addresses
▪ 8-bit instructions
▪ 4-bit data words
• Instruction set contained 46 instructions (of which
41 were 8 bits wide and 5 were 16 bits wide)
• Register set contained 16 registers of 4 bits each
• Internal subroutine stack, 3 levels deep.
[http://en.wikipedia.org/wiki/Intel_4004]
[http://en.wikipedia.org/wiki/Intel_4004]
[http://en.wikipedia.org/wiki/Intel_4004]
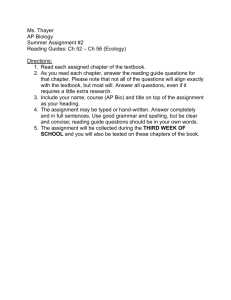
Intel's 8086 Chip
[http://en.wikipedia.org/wiki/Intel_8086]
[http://en.wikipedia.org/wiki/Intel_8086]
[http://en.wikipedia.org/wiki/Intel_8086]
Simplified block diagram of
Intel 8088 (a variant of 8086);
1=main registers;
2=segment registers and IP;
3=address adder;
4=internal address bus;
5=instruction queue;
6=control unit (very simplified!);
7=bus interface;
8=internal databus;
9=ALU;
10/11/12=external address/ data/control bus.
Questions?
THE END