Lunar Reconnaissance Orbiter – Instrument and Project
advertisement

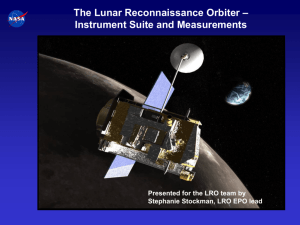
Lunar Reconnaissance Orbiter Presentation to Public Librarians at GSFC Visitors Center David Everett February 2, 2006 LRO Overview • LRO will launch by 2008 to provide critically needed data to enable and to plan future Exploration objectives • LRO provides major exploration and scientific benefits by 2009 – Apollo provided first order information from a small region of the Moon; much more of the Moon need to be explored – LRO objectives addresses future landing sites, polar resources, safety, and lunar science goals – LRO address both science and exploration objectives • LRO instrument suite complements international lunar missions – Six instruments competitively selected – Comparison to international missions demonstrate LRO uniqueness and value David Everett--LRO Overview 2 US Lunar Robotic and Apollo Missions Mission Launch Date Type Ranger 3 Ranger 4 Ranger 5 Ranger 6 Ranger 7 Ranger 8 Ranger 9 Surveyor 1 Lunar Orbiter 1 Surveyor 2 Lunar Orbiter 2 Lunar Orbiter 3 Surveyor 3 Lunar Orbiter 4 Surveyor 4 Explorer 35 Lunar Orbiter 5 Surveyor 5 Surveyor 6 Surveyor 7 Apollo 8 Apollo 10 Apollo 11 Apollo 12 Apollo 13 Apollo 14 Apollo 15 Apollo 16 Apollo 17 Explorer 49 Clementine Lunar Prospector 01/62 04/62 10/62 01/64 07/64 02/65 03/65 05/66 08/66 09/66 11/66 02/67 04/67 05/67 07/67 07/67 08/67 09/67 11/67 01/68 12/68 05/69 07/69 11/69 04/70 01/71 07/71 04/72 12/72 06/73 01/94 01/98 Hard Lander (missed the moon) Hard Lander (hit farside) Hard Lander (missed the moon) Hard Lander (TV failed) Hard Lander Hard Lander Hard Lander Soft Lander Orbiter Lander (crashed) Orbiter Orbiter Soft Lander Orbiter Lander (crashed) Orbiter Orbiter Soft Lander Soft Lander Soft Lander Orbiter (1st Human to orbit the moon) Orbiter Test LM in lunar orbit Mare Tranquillitatis (1st manned lunar landing) Oceanus Procellarum (near Surveyor 3 spacecraft) Flyby (aborted mission after onboard explosion) Fra Mauro (1st highland mission) Hadley-Apennines (1st use of rover, extended LM) Descartes (Lunar highlands) Taurus-Littrow (Last Apollo landing, 1st geologist lunar astronaut) Lunar Orbit radio-astronomy explorer (RAE-B) Orbiter (BiStatic radar indications of polar water) Orbiter (Neutron Spectrscopy indications of polar “water’) David Everett--LRO Overview 3 LRO Payload Provides Broad Benefits INSTRUMENT CRaTER Cosmic Ray Telescope for the Effects of Radiation DLRE Diviner Lunar Radiometer Experiment LAMP Lyman Alpha Mapping Project LEND Lunar Exploration Neutron Detector LOLA Lunar Orbiter Laser Altimeter LROC Lunar Reconnaissance Orbiter Camera Mini-RF Technology Demonstration Measurement Exploration Benefit Science Benefit Tissue equivalent response to radiation Safe, high performance, lighter weight space vehicles Radiation boundary conditions for biological response 400m scale maps of Temperature, surface ice, mineralogy Determines conditions for systems operability, resource including water-ice location Maps of frosts in permanently shadowed areas, etc. Locate potential water-ice on the surface, image shadowed areas Maps of hydrogen in upper 1 m of Moon at 10km scales Locate potential water-ice in lunar soil ~50 m scale polar topography at < 10 cm vertical, roughness Safe landing sites and surface navigation Geodetic topography for geological evolution 1000’s of 50cm/pixel images (125km2), and entire Moon at 100m in UV, Visible Surface Landing hazards and some resource identification Tectonic, impact and volcanic processes, resource evaluation, and crustal evolution X&S-band Radar imaging and radiometry Demonstrate new lightweight SAR and communication technologies, locate potential water-ice Source, history, deposition of polar volatiles David Everett--LRO Overview Source, history, migration and deposition of polar volatiles 4 Comparison to Foreign Systems Demonstrate Uniqueness and Value Reqt’s for LRO 2008 NASA LRO Chang’E-1 Lunar - A (from NASA ORDT, and ESMD RLEP Reqt’s 9/04; NRC Decadal, 2002) [50km orbit, 1 yr+] Competed Payload (CSSAR 2007 launch) [200 km orbit] (JAXA ~ 2007) [Orbiter and Penetrator} Radiation Environment Global assessment including neutrons, GCR (imaging NS, Rad Sensor) High energy particle detector < 400 MeV protons, < 730 MeV heavy ions Not addressed Biological Adaptation Biological responses to radiation (Rad Not addressed Not addressed Sensor) Shielding materials (test-beds) Shielding expt’s with TEP (Rad Sensor) Not addressed Not addressed Geodetic topography (global) 10’s m x,y, with < 1m vertical precision, attn to poles (Lidar) – slope data Laser alt. 1 m altitude resolution Not addressed H mapping to assess ice Landform scale at 100 ppm (~5 km scale at poles) (imaging NS) Not addressed Not addressed T mapping cold traps (polar) Landform scale at 3-5K (40-300K): ~300m scale Microwave radiometer – likely to measure relative temperature. Not addressed Not addressed Not addressed (IR mapper) Putative ice deposits at poles ~25-400m scales in shadows (Imager, Lidar, NS, IR, UV) Sub-meter imaging for landing site assessment Targeted, meter-scale feature detection, hazards (Imager, Lidar) Stereo Camera and Spectrographic Imager > 100 m resolution Not addressed – 30 m resolution camera. Polar illumination High time-rate polar imaging (Imagers) Not addressed Not addressed OTHER Far UV imaging for frosts and lunar atmosphere (farside gravity from lidar) Solar wind detector Farside penetrator - seismic and heat-flow experiments, possible far side gravity. David Everett--LRO Overview 5 Comparison to Foreign Systems Demonstrate Uniqueness and Value Reqt’s for LRO 2008 NASA LRO SELENE SMART-1 Chandrayaan (from NASA ORDT, and ESMD RLEP Reqt’s 9/04; NRC Decadal, 2002) [50km orbit, 1 yr+] Competed Payload (JAXA orbiter ~ 2007) [100km orbit, 1 yr] (ESA lunar 2005 orbiter) [250km periapsis] (ISRO 2007-2008 launch) [100+ km orbit] Mineralogical Mapper Radiation Environment Global assessment including neutrons, GCR (imaging NS, Rad Highly limited overlap in some narrow energy ranges Limited to some energy ranges Radiation monitor 8 keV threshold does not measure neutrons Not addressed Not addressed Not addressed Sensor) Biological Adaptation Biological responses to radiation (Rad Sensor) Shielding materials (test-beds) Shielding expt’s with TEP (Rad Sensor) Not addressed Not addressed Not addressed Geodetic topography (global) 10’s m x,y, with < 1m vertical precision, attn to poles (Lidar) – Not addressed slope data 1.6 km x, y at > 20 m vertical precision (RMS) [not meet LRO goals] Laser alt. 5 m vert. res. Stereo cameras 5 m elev. 10 m x,y H mapping to assess ice Landform scale at 100 ppm (~5 km scale at poles) (imaging NS) 160km scale via GRS (does not meet LRO goals) Limited to 100’s of km scale (H) [does not meet LRO goals] Some potential, but depends on contributed sensors T mapping cold traps (polar) Landform scale at 3-5K (40300K): ~300m scale Not addressed Not addressed Not addressed Not addressed in this mission (cf. GRS) Not addressed Mini-SAR, high energy x-rays (IR mapper) Putative ice deposits at poles ~25-400m scales in shadows (Imager, Lidar, NS, IR, UV) Sub-meter imaging for landing site assessment Targeted, meter-scale feature detection, hazards (Imager, Lidar) Not addressed: best imaging is ~10m/pixel stereo, MS imaging (10+ VISNIR bands) Not addressed (best imaging is 10-100 m/pixel) Not addressed, but imaging (MS) will be included (10’s m/pixel) Polar illumination High time-rate polar imaging Partially addressed, but frequency TBD? Limited Stereo cameras 10 m spatial resolution Particles and Fields, Farside gravity, elemental chemistry Particles and Fields, etc. Hyper-spectral and Infrared Imagers for mineralogical mapping (Imagers) OTHER Far UV imaging for frosts and lunar atmosphere (farside gravity from lidar) David Everett--LRO Overview 6 Lunar Cold Traps • Cold traps exist near the lunar poles (Watson et al., 1961) – Low obliquity of Moon affords permanent shadow in depressions at high latitude. – Temperatures are low enough to retain volatiles for t > tMoon. David Everett--LRO Overview 7 Volatile Content of Cold Traps • Hydrogen enhancements have been detected by Lunar Prospector Neutron Spectrometer (Feldman et al., 1998; 2000) – Spatially correlated to the regions of permanent shadow (Feldman et al., 2001) spatial resolution about 50 km (30 km orbit) orbit 150 km ( 100 km orbit) – Concentrations of H at 1670 ppm detected in upper 1 m in SP PSRs. Feldman et al., JGR David Everett--LRO Overview 8 South Pole Permanent Shadows David Everett--LRO Overview 9 North Pole Permanent Shadows David Everett--LRO Overview 10 Cosmic Ray Telescope for the Effects of Radiation (CRaTER) Instrument Team Name Institution Role Harlan E. Spence BU PI Larry Kepko BU Co-I (E/PO, Cal, IODA lead) Justin Kasper MIT Co-I (Project Sci.) Bernie Blake Aerospace Co-I (Detector lead) Joe Mazur Aerospace Co-I (GCR/SCR lead) Larry Townsend UT Knoxville Co-I (Measurement lead) Michael Golightly AFRL Collaborator Terry Onsager NOAA/SEC Collaborator Rick Foster MIT Project Manager Bob Goeke MIT Systems Engineer Brian Klatt MIT Q&A Chris Sweeney BU Instrument Test Lead David Everett--LRO Overview 11 CRaTER Instrument Overview David Everett--LRO Overview 12 CRaTER Telescope Configuration Five-element detector stack with volumes of TEP sandwiched between them David Everett--LRO Overview 13 Diviner Lunar Radiometer Experiment (DLRE) Instrument Team Name Institution Role David Paige UCLA PI Carlton Allen UCLA Co-Investigator Simon Calcutt Oxford (UK) Co-Investigator Eric DeJong JPL Co-Investigator Bruce Jakosky Univ. of Colorado Co-Investigator Daniel McCleese JPL Co-Investigator Bruce Murray Caltech Co-Investigator Tim Schofield JPL Co-Investigator Kelly Snook JSC Co-Investigator Larry Soderblom USGS Co-Investigator Fred Taylor Oxford (UK) Co-Investigator Ashwin Vasavada JPL Co-Investigator Wayne Hartford JPL Project Manager David Everett--LRO Overview 14 Diviner Measurement Overview Measurement Goals: • Map Global Day/Night Surface Temperatures • Characterize Thermal Environments for Habitability • Determine Rock Abundances at Landing Sites • Identify Potential Polar Ice Reservoirs • Search for Near-Surface and Exposed Ice Deposits Measurement Approach: • 9-channel radiometer (0.3 to 200 micron wavelength range) • 250m spatial resolution Diviner will make precise radiometric temperature measurements of the Lunar surface David Everett--LRO Overview 15 Diviner Heritage Diviner is a nearly build to print copy of the Mars Reconnaissance Orbiter (MRO) Mars Climate Sounder (MCS) MCS Integrated with MRO for August 2005 Launch MCS Flight Model at JPL David Everett--LRO Overview 16 Lyman Alpha Mapping Project (LAMP) Instrument Team Name Institution Role Alan Stern SwRI PI Ron Black SwRI Instrument Manager Dana Crider Catholic University Paul Feldman JHU Randy Gladstone SwRI Kurt Wetherford SwRI John Scherrer SwRI Dave Slater SwRI John Stone SwRI David Everett--LRO Overview 17 LAMP Science/Measurement • LAMP will provide landform mapping (from Lyman albedos) at sub-km resolution in and around the permanently shadowed regions (PSRs) of the lunar surface. • LAMP will be used to identify and localize exposed water frost in PSRs. • LAMP will demonstrate the feasibility of using starlight and sky-glow for future surface mission applications. • LAMP will detect (or better constrain) the abundances of several atmospheric species. David Everett--LRO Overview 18 LAMP Heritage LAMP is almost identical to New Horizons Alice LAMP: 5.0 kg, 4.3 W 0.2º×6.0º slit 1200-1800 Å bandpass <20 Å spectral resolution David Everett--LRO Overview 19 Lunar Exploration Neutron Detector (LEND) Instrument Team Name Institution Role Igor Mitrofanov Russian Institute for Space Research Principal Investigator William Boynton University of Arizona Co-Investigator Larry Evans Computer Sciences Corporation Co-Investigator Alexandr Kozyrev Russian Institute for Space Research Co-Investigator Maxim Litvak Russian Institute for Space Research Co-Investigator Roald Sagdeev University of Maryland Co-Investigator Anton Sanin Russian Institute for Space Research Co-Investigator Vladislav Shevchenko Sternberg Astronomical Institute Co-Investigator Valery Shvetsov Joint Institute for Nuclear Research Co-Investigator Richard Starr Catholic University Co-Investigator Vlad Tret’yakov Russian Institute for Space Research Co-Investigator Jakob Trombka NASA Goddard Space Flight Center Co-Investigator David Everett--LRO Overview 20 LEND Measurement Goals David Everett--LRO Overview 21 LEND Instrument Concept Block Diagram E A A – Collimated Sensors B – Sensors of Thermal Neutrons for Doppler Filter D C – Sensors of Thermal Neutrons D – Sensor of Epithermal Neutrons E – Sensor of High Energy Neutrons David Everett--LRO Overview 22 Lunar Orbiter Laser Altimeter (LOLA) Instrument Team Name Institution Role David E. Smith GSFC PI; global geodetic coordinate system Maria T. Zuber MIT Deputy PI; global topography & coordination of data products with NASA Exploration objectives Oded Aharonson Caltech Co-I; surface roughness James W. Head Brown University Co-I; landing site assessment, E&PO representative Frank G. Lemoine NASA/GSFC Co-I; orbit determination and gravity modeling Gregory A. Neumann MIT, NASA/GSFC Co-I; altimetry analysis and archiving Xiaoli Sun NASA/GSFC Co-I & Instrument Scientist; instrument performance David Everett--LRO Overview 23 LOLA Measurements LOLA makes 3 measurements: (1) range to the surface, (2) spread of the laser pulse, (3) reflectance of the surface LOLA Measurements LRO Measurement Datasets Lunar Shape, Surface Topography Slopes Surface Surface Roughness Reflectance Global Coord. System Gravity Model Precision Orbit, Trajectory Radiation Global topography X X X X X X Image shadow regions X X X X X X Wate r ice X X X Hydrogen mapping Temperature mapping Lander scale ma pping Polar illumination • X X X X X X LOLA Lineage – – – – – GLAS SLA MOLA MLA Clementine David Everett--LRO Overview 24 What Does LOLA Have To Do? 1. Measure the distance between the spacecraft and the surface which, along with the spacecraft position, will allow precise measurements of the lunar shape. 2. Lay down a laser spot pattern that will provide altimetry measurements along- and across-track to enable the surface slope to be derived for safe landing. 3. Measure the distribution of elevation within the laser footprint for estimation of surface roughness (rock size) 4. Identify regions of enhanced surface reflectance that might indicate the presence of water ice on the surface. David Everett--LRO Overview 25 Lunar Reconnaissance Orbiter Camera (LROC) Instrument Team Name Institution Mark Robinson, PI Northwestern University Eric Eliason University of Arizona Harald Hiesinger Brown University Brad Joliff Washington University Mike Malin Malin Space Science Systems Alfred McEwen University of Arizona Mike Ravine Malin Space Science Systems Peter Thomas Cornell University Elizabeth Turtle University of Arizona Clementine Star Tracker Camera David Everett--LRO Overview 26 LROC Measurement Objectives • Landing site identification and certification, with unambiguous identification of meter-scale hazards • Unambiguous mapping of permanent shadows and sunlit regions • Meter-scale mapping of polar regions with continuous illumination • Overlapping observations to enable derivation of meter-scale topography • Global multispectral imaging to map ilmenite and other minerals • Global morphology base map • Characterize regolith properties • Determine current impact hazard by re-imaging 1-2 m/pixel Apollo images David Everett--LRO Overview 27 LROC Instrument Overview • 2 Narrow Angle Components (NACs) for Landing Site Certification LROC • Wide Angle Component to Monitor Polar Lighting and Map Resources • Sequence and Compressor System • Straightforward modifications from previous flight instruments WAC David Everett--LRO Overview NAC1 NAC2 SCS 28 Mini RF Instrument Team Name Institution Role Paul Spudis Johns Hopkins University APL Principal Investigator Chris Lichtenberg Naval Air Warfare Center Co-Investigator Keith Raney Johns Hopkins University APL Co-Investigator Benjamin Bussey Johns Hopkins University APL Co-Investigator Brian Butler National Radio Astronomy Observatory Co-Investigator Mark Robinson Northwestern University Co-Investigator John Curlander Vexcel Member Mark Davis USAF/Rome Laboratory Member Erik Malaret Applied Coherent Technology Member Michael Mishchenko NASA Goddard Institute for Space Studies Member Tommy Thompson NASA/JPL Member Eugene Ustinov NASA/JPL Member David Everett--LRO Overview 29 Mini-RF Spiral Development DoD NASA TacSat FY 09 International LRO FY 08 Chandrayaan-1 FY 07 (Forerunner) David Everett--LRO Overview 30 Possible Mini-RF Lunar Demonstrations SAR Imaging (Monostatic and Bistatic) Chandrayaan-1 Lunar Reconnaissance Orbiter (LRO) Chandrayaan-1 LRO Monostatic imaging in S-band to locate and resolve ice deposits on the Moon. Monostatic imaging in S-band and X-band to validate ice deposits discoveries on the Moon Communications Demonstrations X-Band Comm Demo Component Qualification Coordinated, bistatic imaging in S-band, to be compatible with the Chandrayaan-1 and LRO spacecraft, can unambiguously resolve ice deposits on the Moon Other Coordinated Tech Demos: e.g ranging, rendezvous, gravity LRO Communications demonstration to Various Assets David Everett--LRO Overview 31 4 Days to the Moon David Everett--LRO Overview 32 (M) Trajectory/Orbit Overview Minimum Energy Lunar Transfer: ~ 4 days 30 x 216 km Quasi-frozen Orbit: up to 60 days Lunar Orbit Insertion Sequence (4): 2-4 days 50 km Polar Mapping Orbit: at least 1 year David Everett--LRO Overview 33 Payload Overview CRaTER Diviner LAMP LOLA LROC Mini-RF LEND +X +Z +Y David Everett--LRO Overview 34 LRO Deployed HGA Diviner ST 3 PANEL MODULAR SOLAR ARRAY ST Mini-RF PROPULSION MODULE LOLA THRUST LROC X Diviner SUN Y David Everett--LRO Overview Z MOON 35 LRO Deployed CRaTER INSTRUMENT MODULE (OPTICAL BENCH) AVIONICS MODULE HGA LEND Mini-RF THRUST X Y SUN 3 PANEL MODULAR SOLAR ARRAY Z MOON David Everett--LRO Overview 36 Launch Vehicle Configuration ATLAS V , DELTA-IV Interfaces 1194 mm PAF Worst Case EELV Fairing Envelope (4m fairing) Fairing Access – 3 Doors T-zero GN2 Purge System Two 61 Pin Umbilical Connectors Add X axis view (top down) 1194 mm PAF David Everett--LRO Overview 37 Spacecraft Electrical Overview Omnis Mini-RF Low-Rate Cmds & Tlm LROC S-Xpndr SpaceWire Network LAMP Hi-Rate Tlm HGA Ka-Xmtr LAMP Sci. & HK ATA 20MHz LOLA USO 9500 C&DH DDA Thermistors Closed Loop Htrs ST(2) HGA Gimbals LEND Diviner GIMBAL CONROL IRW(4) CSS(10) Unsw. + 28V IMU MIL-STD-1553 Network CRaTER Battery Solar Array SA Gimbals Sw. and Unsw. +28V Pwr Services PSE PDE Propulsion SA & HG Deploy Actuation GIMBAL CONTROL Vehicle Separation Break Wires David Everett--LRO Overview 38 LRO Data Generation David Everett--LRO Overview 39 (M) Narrow FOV Coverage 1-month 2-month 10 100 9 90 8 80 Grid Spacing (m) Grid Spacing (km) LOLA 7 6 5 Equator 4 3 2 Full 1 4-month 70 8-month 88.5° 60 Minimum 50 40 89.0° Full 30 20 89.5° 10 0 0 1 2 3 4 5 6 7 8 9 10 11 12 1 2 3 4 5 6 7 8 9 10 11 12 Months of Data Collection (months) Months of Data Collection (months) David Everett--LRO Overview 40