Study
lib
Documents
Flashcards
Chrome extension
Login
Upload document
Create flashcards
×
Login
Flashcards
Collections
Documents
Last activity
My documents
Saved documents
Profile
Foreign Language
Math
Science
Social Science
Business
Engineering & Technology
Arts & Humanities
History
Miscellaneous
Standardized tests
Engineering & Technology
Computer Science
Artificial Intelligence
Asymmetric Interpretations of Positive and Negative Human Feedback
Astrelli P., Colantonio S., Gurevich I., Martinelli M., Salvetti O
Africana Studies Course Syllabus: History & Culture
Assuming Facts Are Expressed More Than Once
Associative Patterns of Web Browsing Behavior Myriam Abramson Shantanu Gore
Association Rule Mining: Introduction & Apriori Algorithm
Association for the Advancement of Artificial Intelligence www.aaai.org
Association for the Advancement of Artificial Intelligence
Association for Symbolic Logic .
Assiut university researches Differential Search Algorithm
Assisting Scientists with Complex Data Analysis Tasks through Semantic Workflows
Assistant or Associate Professor, Secondary Mathematics Education
Assistant Director, Admissions
Assistant Agents for Sequential Planning Problems Please share
Assistant Agents For Sequential Planning Problems Owen Macindoe
Assimilation of Pacific Lightning Data into a Mesoscale NWP Model
Assignment and Scheduling Communicating Periodic Tasks in
Assigning Hybrid-Weight for Feature Attribute in Naïve Bayesian Classifier
Assigned: 21 Feb 07 Required:
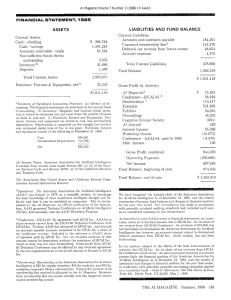
ASSETS
Assessor Job Description
Assessment of the Critical Components of a Transformative Alexei V. Samsonovich
ASSESSMENT OF GROUND WATER POTENTIAL FROM REMOTE
Assessment for CS405
«
prev
1 ...
780
781
782
783
784
785
786
787
788
... 941
»
next
Suggest us how to improve StudyLib
(For complaints, use
another form
)
Your e-mail
Input it if you want to receive answer
Rate us
1
2
3
4
5
Cancel
Send