References - Carollo Engineers
advertisement

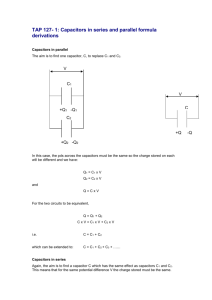
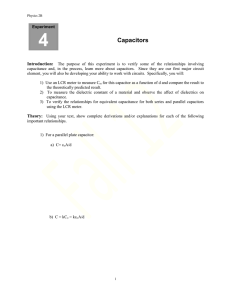
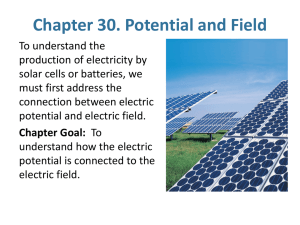
Power Factor Correction – A Fresh Look Into Today’s Electrical Systems Christopher Heger P.K. Sen Anthony Morroni Member, IEEE Carollo Engineers, Inc. 10822 W. Toller Drive, Suite 200 Littleton, CO 80127 cheger@carollo.com Fellow, IEEE Colorado School of Mines 1610 Illinois Street Golden, CO. 80401 psen@mines.edu Member, IEEE Carollo Engineers, Inc. 10822 W. Toller Drive, Suite 200 Littleton, CO 80127 amorroni@carollo.com Abstract -- Poor power factor in an industrial plant can lead to low energy efficiency, unacceptable voltage regulation, larger equipment size, and potential damage to plant equipment when not corrected properly. The most common and inexpensive way to correct power factor in an industrial application is by supplying reactive power with a capacitor bank. However, other application issues must be considered when capacitance is added to the system. This paper takes a fresh look at an old application, focusing on the potential issues with power factor improvement capacitors, available power factor correction methods, and design considerations for implementing these technologies in today’s modern power systems. Index Terms—Active filter, apparent power, de-tuned capacitor, harmonic resonance, power factor, power factor correction capacitor, power quality, reactive power. I. INTRODUCTION Power quality has always been a major concern in any electrical power system design. Power Factor (PF) is one of the measures of the overall power quality and must be considered in a system that has a large amount of capacitance or inductance. Poor PF can lead to excessive current requirements and may also cause operating issues with electric generators, transformers and the distribution system. It makes the electrical system less efficient, and has the potential to damage the machines. To accommodate these issues, various devices are used to balance the reactive power being provided or absorbed. To date, the most common way to improve a poor “lagging” PF in any plant is to install “PF improvement capacitors”. This method is a time proven means for correction provided at a reasonable cost and with typically good reliability when there were not many non-linear loads. However, modern electrical systems design concepts as well as advancements in power electronic technologies may shift the design philosophy for implementing PF correction. II. POWER FACTOR CORRECTION There are different forms of PF that must be considered, displacement PF and total PF. Displacement PF (cosθ), as shown by the power triangle and equation in Figure 1 is the relationship between the real power (P), in Watts (W), and the apparent power (S), in Volt-Amp (VA), of the fundamental wave. The remaining side of the right-angle triangle is the reactive power (Q), in Volt-Amp-Reactive (VAR). Total PF is the relationship between real power and apparent power when including the distortion affects of harmonics. Because total PF is always changing based on the harmonics in the system, it is difficult to track at all operating conditions, and basic metering equipment cannot accurately measure it. As such, the PF generally referred to in electrical discussions as well as this paper is displacement PF. However, it will be noted throughout the paper when total PF may be applied. In an ideal electrical system where the PF is 1.0 (i.e., θ = 0), the apparent power is equal to real power (no reactive power) so the system is providing the minimum current to produce the same amount of work and operate the load. At this point, the system is at its peak performance. In the situation where the PF is other than 1.0, the apparent power is greater than the real power and the current required to perform the same amount of real work (W) is higher than if the PF is 1.0. This increase in current results in increased sizing of the power system (transformers, cable, overcurrent protection, etc.) as well as increased copper losses (I 2R) in the system. Fig. 1. Power triangle The copper losses increase by the square of the current; therefore, an increase in current results in significantly more power loss. Two common equations for calculating the loss in a 3-phase system (for a given resistance R) are: 𝑃𝑙𝑜𝑠𝑠 (𝑊𝑎𝑡𝑡𝑠) = ( 𝑃 (𝑊𝑎𝑡𝑡) √3×𝑉1 ×𝑃𝐹 2 ) × 𝑅 (𝑂ℎ𝑚) (1) And 𝑃𝑙𝑜𝑠𝑠 (𝑊𝑎𝑡𝑡𝑠) = ( 𝑆 (𝑉𝐴) 2 √3×𝑉1 ) × 𝑅 (𝑂ℎ𝑚) (2) Where, V1 is the line voltage (V). The copper power loss increase in percent at any leading or lagging power factor compared to 1.0 PF is given by equation (3). The function of the copper loss equation is depicted in Figure 2: 1 2 ∆𝑃𝑙𝑜𝑠𝑠 (%) = ( ) − 1 𝑃𝐹 (3) Fig. 3. Power factor penalties at 0.90 or 0.95 PF limit In this example the cost of the power losses due to system resistance were calculated based on $0.10 per kWh. The analysis shows that the cost associated with a poor PF may not always be substantial in regards to an electric bill. However, the case study presented later in this paper shows that a PF correction system often presents the ability to pay for itself within a few years of the installation. Therefore, the added benefits of operating at a higher efficiency and the slight cost reduction in the electric bill may justify the means for adding PF correction to an electrical system. III. POWER FACTOR CORRECTION TECHNIQUES Fig. 2. % Copper loss vs. power factor Due to the costs associated with energy, today’s power systems must be designed to maximize energy efficiency. Applying the values from Figure 2 above, a PF of 0.9 increases the energy costs associated with losses by a factor of approximately 1.23, whereas a PF of 0.7 more than doubles the cost associated with the system copper losses. Another cost associated with poor PF is the penalties imposed by the utilities as part of their demand side energy management. If a consumer’s meter ever reads outside of the acceptable PF (typically 0.95), the electric utility assesses a penalty consistent with the utility’s rate structure. Not all utilities are charging for poor PF, but for those that are not yet enforcing PF penalties; they do have plans to begin implementing penalties in the near future. An example of a PF penalty that one utility has adopted increases the customer’s demand charge by 1% for every 1% the customer is outside of the predetermined PF limit. The following calculations, applied to a hypothetical facility, demonstrate the costs of the PF penalty and the additional system losses. Applying the demand charges of approximately $5 per kW and efficiency losses to a facility with an average operating load of 750 kW, the potential costs associated with a poor PF are displayed in Figure 3. There are three commonly used techniques employed in industrial plants. The following section provides a comprehensive discussion and addresses the application issues. A. Shunt Capacitors Shunt capacitors have been and continue to be the most cost effective way for correcting displacement PF. The best way to visualize how capacitors correct PF is by using the (self-explanatory) power triangle shown in Figure 4 below. Fig. 4. Addition of capacitance to correct a 0.8 PF to a 0.95 PF The advantages of this form of PF correction include the relatively low cost, small footprint, and ease of application. This form of PF correction is typically viable for linear power systems. The disadvantages of this form of PF correction surface when the power system has many non-linear (harmonic generating) loads that when combined with the PF correction capacitors may result in a periodically destructive issue, resonance. Electrical resonance occurs at some multiples of the natural frequency when the reactance between a parallel capacitance and an inductance, or a series capacitive reactance and the inductive reactance are equal. When this condition is reached, excessive current will flow throughout the system thereby increasing the voltage to a higher level. Two potential resonance conditions can occur; 1. When motors are started or stopped, 2. when the power system contains harmonics with a frequency that is a multiple of the natural frequency resulting from the capacitance and inductance in the power system. 1) Motor Over Excitation Caused by Capacitors PF improvement capacitors are often placed at or near the motor terminals to maximize the effect. If the capacitance is too large, there is a potential for the capacitor current to be equal to the magnetizing current drawn by the induction motor either during operation or during the starting or stopping of the motor. This creates a resonant condition and an excessive voltage at the terminals of the motor [1]. This is illustrated in Figure 5 where capacitor currents are overlaid with the motor magnetizing curve. This Figure demonstrates the effects of a properly sized capacitor versus an oversized capacitor that may cause damaging overvoltages on the conductor insulation or excessive currents. When the voltage is at a nominal level of 460 V, the oversized capacitor is drawing more reactive current than the motor magnetizing current. When the motor is turned off, the motor reactance decreases to the reactance of the oversized capacitor, and a resonant point will exist. At this resonance point, a potential current and voltage results at the point where the capacitor curve crosses the magnetizing line of the motor. Therefore this Figure helps to illustrate how the oversized capacitor may cause damaging over-voltages on the conductor insulation or excessive currents. To resolve this issue, the motor manufacturer must be consulted to determine maximum allowable PF correction capacitor size. As long as the installed capacitor is less than the maximum permitted kVAR, there should not be any issues, as demonstrated by the smaller capacitance where the capacitor curve does not exceed the rated motor voltage on the motor magnetizing current curve. 2) Harmonic Resonance Harmonic currents and voltages are generated at multiples of the fundamental frequency (60 Hz). Non-linear loads such as variable frequency drives (VFDs), computers with switching power supplies, lighting ballasts, and other power electronic circuits are typically sources of harmonics. In today’s power systems, non-linear loads are more prevalent as power electronics become smaller, less expensive, and offer higher reliability. As a result, today’s power systems must support a significant amount of harmonics. Harmonics are associated with the additional heating they cause leading to premature failure of equipment and reduced system reliability. However, they also cause resonance issues within a power system that has the unfortunate match of capacitance and inductance. The following equations demonstrate that the reactance of a capacitor (Equation 5) and an inductor (Equation 4) are frequency dependent. At the fundamental operating frequency, there may not be a resonance issue. But when currents are produced at other frequencies, i.e. harmonics, the impedance of the inductors and capacitors will change. When the inductive reactance and the capacitive reactance are equal at a particular frequency, an excessive current may flow through the capacitor and inductor. 𝑋𝐿(𝑂ℎ𝑚) = 𝑗2𝜋𝐿𝑓 𝑋𝐶 (𝑂ℎ𝑚) = −𝑗 2𝜋𝐶𝑓 (4) (5) Where L is the inductance in Henry and C is the capacitance in Farad. There are several ways to determine if there is a potential resonance issue in an electrical power system. Equation (6) calculates the harmonic resonance frequency (hr) at a given point based on the short circuit (fault) MVA and the 3-phase capacitor bank MVAR rating. 𝑀𝑉𝐴 𝑆𝐶 ℎ𝑟 = √ 𝑀𝑉𝐴𝑅 (6) 𝐶𝐴𝑃 Fig. 5. Motor magnetizing curve [6] If the power system has harmonic frequencies that are on the order of the 5th, 7th, etc., then modifications are needed to avoid a resonance condition. This is because of the typically high magnitudes of voltage and current that is experienced at these lower order harmonics. The disadvantage to this quick calculation is that it will not always detect a resonance issue because the system characteristics determining the short circuit MVA are always changing. An alternative means to determine a resonance condition is through computer modeling. Using a computer-based model can sometimes be a relatively quick way to evaluate a power system, and it offers the ability to easily change the system operating parameters. In many cases, the model is often readily available because the system parameters and base model is used for other evaluations such as fault calculations, load flow, and arc flash studies. The model generates a frequency scan which determines the system’s equivalent impedance at each frequency. Using this information, the potential resonant frequencies can be determined. One caution in designing PF correction for an electrical system is how the capacitors are utilized. If the capacitors are distributed (located at each motor), it becomes extremely difficult to determine a potential resonance condition through modeling, because as motors turn on and off, the system parameters are changing. When looking at a system with three motors of different sizes, there are potentially 7 different operating scenarios. If this concept is applied an entire facility with many loads, the number of operating conditions is only limited by the number of individual loads. So it quickly becomes unrealistic to model all potential operating conditions. For a system that contains varying harmonics, the more practical means for providing PF correction capacitance is by adding an automatic switching capacitor bank at one point in the system. To prevent too much or too little capacitance, the VAR rating of the automatic switching capacitance is varied. This is accomplished by opening and closing contactors based on continuous metering of the system PF. One disadvantage to harmonics is that they are sometimes said to be self-correcting. If an operating system experiences a resonant condition, the system will self-correct by blowing a fuse, or worse, by destroying the equipment. To correct a resonant condition by other means than destruction, the system inductance or capacitance characteristics must be changed. This correction can be done by reducing or increasing the capacitance or by de-tuning the resonant frequency with a passive filter. Adding a tuned filter (consisting of an inductor and capacitor circuit), can shift the resonant point to a slightly different frequency than the resonant harmonic. For example, if the correct PF correction capacitor resulted in a system resonance point at the 11th harmonic, and the power system had 11th harmonics present, then a filter could be designed to provide the required capacitance but detuned to the 10.7th harmonic. Thus avoiding the resonant condition by shifting it to a harmonic that does not naturally occur. To effectively apply the detuned filter to the system for PF correction, it will need to be applied to all capacitors within the system. If the capacitors are distributed, then this continues to lead to the complication of accurately designing filters and capacitors for all operating scenarios. If there is a single automatic switching capacitor bank, then it too will need a detuned filter to avoid resonance issues. If the lumped bank is actively controlled, then the detuning filter will also need to be actively controlled so it can ensure that the system resonance point is not at an integer multiplier of the fundamental frequency. This process effectively detunes the filter throughout the operating range of the actively varying capacitor bank. Caution must be taken when detuning a capacitor because by removing a resonant condition at one frequency, it may cause a resonant condition at another frequency. To avoid this, it is recommended to always detune at high magnitude low harmonic orders such as the 5th or the 7th harmonic. These are common harmonics that create a relatively large magnitude of current, so even if the resonant condition isn’t at the 5th or the 7th harmonic, the reduction in current can reduce the stress in the system [3]. B. Active Filter An advanced method of improving the power quality of a system is by using an active filter. An active filter uses the same components and general theory of a VFD, but rather than providing a clean sine wave to the system, and active filter purposely injects harmonics and/or reactive power into the system as required to meet the desired power quality. Because the active filter is continuously monitoring the system power quality and actively injects reactive power, it not only corrects displacement PF, but it can also correct total PF for a complete system PF improvement. An example of a typical system design is shown in Figure 6 below. Fig. 6. Active filter wiring diagram [2] The active filter is installed in parallel with the electrical system and injects current based on an algorithm where the process variable is the current measurement downstream of the active filter. A diagram of this arrangement is shown in Figure 7 where the active harmonic filter shown in Figure 6 is represented by the shape labeled “AHF”. This closed loop control offers the highest level of accuracy because the control is based on net current measurements after the current is injected by the active filter. a complete system. That advantage is the natural effect that harmonics have of cancelation. Because of this effect, the relationship between active filter sizing and the number of VFDs is not linear. Table 1 demonstrates this concept when applied to a system with multiple motors. In this example, an active filter is applied to a 125 HP motor, powered by a 6 pulse VFD with 3% line reactors. The same active filter is then applied to 6 motors. This non-linear relationship demonstrates why it can be more cost effective to apply an active filter solution to the entire system as opposed to individual loads. TABLE I ACTIVE FILTER SIZING [5] Fig. 7. Active filter closed loop control [2] A typical active filter offers three modes of programmable control. The three modes are Harmonic Mitigation, Reactive Power Control, and Load Balancing. Operating in any of these modes of control requires the active filter to supply energy into the system. Therefore, the sizing of the active filter will depend on which operating modes will be utilized. The filter has the ability to operate in any single mode of operation, or it can be programmed to allocate specific percentages of its output to the desired mode of control. For example, 50% of the power output can be applied to PF correction through reactive power injection, and the remaining 50% may be applied to harmonic mitigation through harmonic current injection. The allocated requirements often vary based on the amount of correction that is needed. If the harmonics are fairly large in magnitude, but the PF is close to the desired set point, more energy may be allocated to the harmonic correction. Common active filter sizes are 50 A, 100 A, or 300 A, The value represents the amount of current the filter is capable of injecting. Because the filters are manufactured in the standard sizes, the applied filter is often oversized for the specific application. The advantage of this over sizing is that if the filter is provided specifically for harmonic mitigation, then there is typically excess capacity for PF correction. Equation (7) can be used to determine the amount of capacity remaining for power quality improvement. 𝑃𝐹 𝐶𝑜𝑟𝑟𝑒𝑐𝑡𝑖𝑜𝑛 𝐼 = √(𝐴𝑐𝑡𝑖𝑣𝑒 𝐹𝑖𝑙𝑡𝑒𝑟 𝐼2 − 𝐻𝑎𝑟𝑚𝑜𝑛𝑖𝑐 𝐼2 ) (7) When determining if an active filter should be applied to a system, the footprint, cost, and cooling requirements must be considered. When comparing PF correction capacitors to an active filter, the size difference is minimal. However, the cost of the filter and cooling requirements are quite different. The power electronics of the active filter release a significant amount of heat which typically requires a conditioned air space. A further cost analysis is provided in the case study below. There is an inherent advantage to installing active filters to Quantity (125 HP, VFD, 3% Line Reactor) Active Filter Size if Harmonics Are Additive (Amps) Actual Active Filter Size Required (Amps) 1 47.5 47.5 2 95 88.5 3 142.5 123.3 6 285 198.3 Caution must be taken when applying both an active filter and a passive filter to the same system. As shown in Figure 6, the particular system is equipped with a passive filter containing capacitors. Because the active filter is injecting current and essentially removing the harmonic, there will be no harmonic currents to create a resonance issue while operating. However, when the active filter is not operating, the harmonic currents can resonate with the capacitance. As a result, there is a chance that a resonant condition may exist when the active filter is not operating. Solutions to this potential issue is disconnecting the entire active filter when it is not operating, or detuning the capacitance as described earlier in the paper. C. Combined Power Factor Correction (Active Filter and Capacitors) In cases where the PF is poor in large systems, a combination of PF correction capacitors and an active filter may yield the best results. In this hybrid system, the capacitors becomes a base VAR support, while the active filter plays the role of either adding VAR or absorbing VAR to achieve a desirable PF. A theoretical example outlining a few scenarios of how an electrical system would function with a combination of an active filter and a capacitor bank is outlined in the following bullets: • During operating periods when the load is absorbing more VAR then the capacitor bank can provide, the active filter would provide the necessary VAR to reach the desired PF. • As the operating load absorbs less VAR, the active filter would reduce the amount of VAR it provides to meet the desired PF. • If the load ever reached an operating point where the load requires less VAR than the capacitor bank provides, the active filter would absorb the excess VAR to achieve the desired PF. Using this hybrid system provides a significant amount of flexibility with consistently accurate results. It also reduces the chances of resonant conditions because the active filter is also filtering the harmonics. However, there is a significant cost as well as large footprint associated with using two types of PF correction equipment. The justification for this type of system is typically for large systems, with an extremely poor PF to justify the high cost. IV. A CASE STUDY – WATER RECLAMATION FACILITY In this case study, three methods of PF correction are reviewed. 1) Distributed PF Correction Capacitors 2) Lumped PF Correction Capacitor, and 3) Active Harmonic Filter (Utilizing the reactive power compensation mode) The water reclamation facility receives power from the utility at 13.2 kV with approximately 4,467 A of available fault current, and is stepped down to a 480 V distribution voltage via a 1500 kVA transformer. The distribution system consists of main switchgear that provides power for 4 motor control centers. The combined connected load of the facility consists of 1,090 HP on 6 pulse VFDs, 200 HP across the line starting capability, and approximately 500 kVA of miscellaneous building loads. A. Distributed Power Factor Correction Capacitors The original design for PF correction was to apply PF correction capacitors at each motor greater than or equal to 5 HP. This is the standard that has been in effect at other facilities and has proved to offer an acceptable PF. The total purchase cost of the capacitors was $3,800 to provide 55 kVAR to 18 motors. The required footprint is negligible since the capacitors are installed above the MCCs. While this appeared to be a reasonable means for PF correction that can pay for itself within a few years, the plant encountered issues with the fuses blowing on certain capacitors during facility start-up. Initial investigation suggested the possibility of oversized capacitors as well as harmonic resonance. A simple field test was performed. In this test, all of the large non-linear loads were turned off (all VFDs), and the loads that had issues with their PF correction capacitors were started. Under these conditions with the non-linear loads not operating, the PF correction capacitor fuses did not fail. Subsequently, after the non-linear loads were turned on, the fuses failed quickly. The conclusion was that fuse failures were due to harmonic resonance triggered by the VFDs and not from oversized capacitors. The next step was to determine if the resonant condition could be corrected without the capacitor fuses blowing and disconnecting the capacitors. Using the fault current and connected capacitance in Equation (6) predicted harmonic resonance between the 70th and 115th harmonics. This did not prove the case for harmonic resonance because at these high harmonic frequencies, the current magnitudes are extremely small. The next attempt to prove the harmonic resonance was to model the electrical system with the assistance of a commercially available distribution software package. Utilizing the frequency scan feature using the same operating conditions utilized under the field test provided the graph shown in Figure 8 below. Fig. 8. Frequency scan The frequency scan suggested a potential resonant condition at approximately the 26th harmonic, which indicates a potential resonant condition. However, the resulting resonant current through the capacitor did not justify the blown fuses. What this analysis revealed is that even though the system was modeled, and harmonic resonant conditions were calculated, the calculation cannot effectively show every condition where resonance may exists. The reason is that there are too many operating conditions that must be modeled to determine the condition that caused resonance. It was concluded that the solution to this particular case was to disconnect all the system capacitors to ensure that the stresses caused by the system resonance did not lead to any damage from overstressing the equipment. The plant then must measure their facility PF at different operating points and determine if any of the following technologies are desired to correct their PF. B. Automatically Switched Power Factor Correction Capacitor The solution of adding a single automatically controlled capacitor bank at the main switchgear location to compensate for the facility’s PF was considered. Because this solution utilizes capacitors, system harmonic resonance must be evaluated. When applying the short circuit calculation, the VAR rating of a capacitor bank turned out to be much larger than when capacitors applied to the individual motor loads. This is because the added capacitors will also be correcting the PF for the small motor loads and other miscellaneous loads throughout the facility. With an average operating load of 750 kVA, the resultant KVAR required to meet the desired overall PF of 0.95 is 125 kVAR. The initial model revealed various harmonic resonance potentials depending on the size of the actively connected capacitors. Since the capacitor bank varies in the amount of connected capacitance in 25 kVAR steps to achieve the desired PF, any type of detuning that is applied to the bank will also require the capability of varying the filter components to properly detune. For this example, a specific random snapshot operating condition of the facility is used. The expected resonant condition is modeled at the 17th harmonic. The detuning filter (series inductor to the PF correction capacitor) can be properly sized using the computer program. As discussed earlier, even though the resonant condition may exist around the 17th harmonic, the targeted frequency for detuning is often at a lower harmonic so that another resonant condition is not created. In this case, the targeted harmonic is the 11th. As shown in the frequency scan graph shown in Figure 9, the detuned filter frequency created a resonant condition just below the 11th harmonic. In the electrical system, there are not any natural voltages or currents at this frequency, so the resonant concerns are reduced. The cost of the lumped, de-tuned capacitor bank is roughly $12,500. Compared to the distributed capacitor installation, the lumped capacitor is around 3 times more expensive, but can more effectively reach the desired PF for the facility than the distributed capacitors. This is because the distributed capacitors do not account for the poor PF of approximately 500 kVA of miscellaneous building loads. The de-tuned lumped capacitor further protects the system from potential resonance problems. Fig. 9. Detuned frequency response The large capacitor bank cannot be placed above the MCC similar to the distributed capacitors. For this example, the dimensions of the capacitor bank are approximately 30”Wx36”Dx90”H. Therefore, additional square footage and cabling must be considered when making an economic comparison. C. Active Filter Reactive Power Compensation To apply the active filter, it is recommended that to get the most benefit, they be placed as close to the load as possible. However, this approach proves to be very costly since multiple active filters would be required. Therefore, two installation methods were considered, (i) one filter at the switchgear, and (ii) one filter at each of the four MCCs. To size the active filter a software package was utilized. The software looked at many system parameters including the number of loads on VFDs, the harmonics produced by VFDs, and the amount of motor load not on VFDs. The software determines the amount of harmonic distortion, as well as the system PF in order to determine the amount of correction the system requires. In this case study, there are passive harmonic filters for each of the large 250 HP motor loads, so the system harmonics meet the recommendations of IEEE519. Therefore, the software concluded that none of the active filter’s capacity needs to be reserved for harmonic mitigation. The software also concluded that because a majority of the motor load is on VFDs, the system PF requires minimal compensation to meet the facilities set point of 0.95. Therefore, the recommended unit size when either applied at the switchgear, or when applied at each individual MCC is the smallest unit commonly offered at 50A. Applying one filter at each MCC would quadruple the cost for this particular installation. The main purpose for the active filter is PF correction opposed to harmonic mitigation. Because the proximity is not as important for PF correction, and the smallest available unit is sufficient for either application, applying one active filter at the switchgear was recommended. A single 50A active filter is approximately $30,000. This solution offers the most control, the possibility of harmonic mitigation, the possibility of correcting PF for future loads, and possibly better results for the overall electrical system performance. The final consideration for this installation is the footprint. The dimensions for unit is approximately 31.5”W x 23.8”D x 75”H. When comparing the automatically switched capacitor approach to an installation of a single active filter, they are approximately equal in size. D. Case Study Conclusion Because a large portion of motor load is on VFDs, the original overall PF for the system was relatively good (at 0.89 lagging). The economic analysis presented in Table 2 shows that the pay-back for implementing either the lumped capacitor or the active filter is difficult to justify when the PF limit is at a 0.9. However, when the utility PF correction requirements become more stringent (a 0.95 limit opposed to the current 0.9 limit), the economic payback is significantly reduced. At that time, the evaluation shows that both the lumped capacitor solution as well as the active filter solution may be viable. TABLE II CASE STUDY COST ANALYSIS Power Factor Correction Option Distributed Capacitors Lumped Capacitor Bank Single Active Filter Multiple Active Filters $3,800.00 Payback with a 0.9 Limit (Years) 8.4 Payback with a 0.95 Limit (Years) 1.1 $12,500.00 27.8 3.6 $30,000.00 66.7 8.7 $120,000.00 266.7 34.6 Equipment Cost V. CONCLUSION Poor PF in any power system operation is not only undesirable, but it can cause serious issues that lead to additional consumer costs when not corrected properly. In today’s power systems, common and more traditional methods of applying PF correction by using shunt capacitors must be reconsidered. More harmonic generating devices are present in modern electrical systems and special consideration should be taken into account when designing PF correction systems. Factors such as system resonance, PF penalties in the utility billing, and the flexibility of the PF correction systems greatly influence the justification of the type of PF correction and must be applied in a case by case basis. REFERENCES [1] “Self-Excitation Concerns with PF Correction on Induction Motors,” Northeast Power System, Inc., 1999-2009, www.nepsi.com. [Accessed: September 25, 2011] [2] “Energy Efficiency and PQ Solutions – Americas EE Consultants Training”. Presentation, Schneider Electric, Denver, Colorado, 2010. [3] IEEE Recommended Practice for Industrial and Commercial Power Systems Analysis, IEEE Std. 399 (Brown Book), IEEE, Piscataway, NJ, 1997. [4] IEEE Recommended Practices and Requirements for Harmonic Control in Electrical Power Systems, IEEE Std. 519, IEEE, Piscataway, NJ, 1992. [5] Personal Communication, Jim Johnson, July 2011. [6] IEEE Recommended Practice for Electrical Power Distribution for Industrial Plants, IEEE Std.141 (Read Book), IEEE, Piscataway, NJ, 1993.