Image-based pattern recognition principles
advertisement

Image-based pattern
recognition principles
Presenter : Ke-Jie Liao
Advisor : Jian-Jiun Ding, Ph. D.
Professor
DISP Lab
GICE
National Taiwan University , Taipei, Taiwan,ROC
1
Outline
Introduction
2D Matched Filter
Image Registration
Bayes Statistical Classifier
Neural Networks
Syntactic Recognition
Face Recognition
2
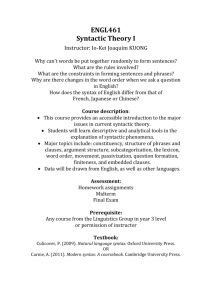
Introduction
Fig.1 Basic components of a pattern recognition system[8]
3
Introduction
Data acquisition and sensing
Pre-processing
Removal of noise in data.
Isolation of patterns of interest from the background.
Feature extraction
Finding a new representation in terms of features.
(Better for further processing)
4
Introduction
Model learning and estimation
Classification
Learning a mapping between features and pattern groups.
Using learned models to assign a pattern to a predefined
category
Post-processing
Evaluation of confidence in decisions.
Exploitation of context to improve performances.
5
Table 1 : Examples of pattern recognition applications[8]
6
2D Matched Filter
Functionality
Degrading the noise effect.
Computing the similarity of two objects.
(Template matching for images)
Functional block
Impulse response H*(-m,-n)
2D Matched Filter
Input image I(m,n)
Template image H*(-m,-n)
Output image Y(m,n)
7
2D Matched Filter
Mathematical expression
Without normalization
Y(m,n)=I(m,n) ﹡H*(-m,-n)
Normalization
Y (m, n)
I (m m1, n n1) H *(m1, n1)
m1 n1
2
|
H(m1,n1)|
m1 n1
2
|
I(m+
m1,n+
n1)|
m1 n1
8
2D Matched Filter : Template
Output image
Matching
Input image
I(m,n)
2D Matched
Filter
Template image
H(m,n)
Without normalization
Rotated image
H*(-m,-n)
With normaliztion
9
2D Matched Filter : Template
Matching
Drawbacks
Poor discriminative ability on template shape.
(Ignoring the structural relation of patterns)
Changes in in rotation and magnification of
template objects result in enormous number of
templates testing.
Template matching is usually limited to smaller local
features, which are more invariant to size and shape
variations of an object.
10
Image Registration
What is Image Registration?
Aligning images correctly to make systems have
better performance.
Misregistration between images
Translational differences
Scale differences
Rotational differences
11
Image Registration : Detecting
Translational Parameter
Spatial domain approach
-Normalized 2D matched filter
The highest output value is the best translational
position.
Frequency domain approach
-Phase correlation method
12
Image Registration : Detecting
Translational Parameter
Phase correlation method
F2(x, y) = F1(xx0, yy0)
F.T.
F2(wx, wy) = F1(wx, wy) exp{i(wxx0 wyy0)}
Cross-power spectrum
F 1( wx, wy )F 2 *( wx, wy )
G( wx, wy )
exp{i ( wxx 0 wyy 0)}
| F 1( wx, wy )F 2( wx, wy ) |
I.F.T.
G ( x , y ) ( x x 0, y y 0 )
13
Image Registration : Detecting Scale
and Rotational Parameter
Detecting rotational parameter
F 2( x, y ) F 1( x cos 0 y sin 0 x 0, x sin 0 y cos 0 y 0)
F.T.
F 2( wx, wy ) F 1( wx cos 0 wy sin 0, wx sin 0 wy cos 0) exp{i( wxx 0 wyy 0)}
Taking magnitudes both sides
Representing in polar form
M 2( , ) M 1( , 0)
14
Image Registration : Detecting Scale
and Rotational Parameter
Detecting scale parameter
F2(x, y) = F1(ax, by)
F.T.
1
wx wy
F 2( wx, wy )
F 1( , )
| ab |
a b
Frequency variables to a logarithmic scale
1
F 2(log wx,log wy )
F 1(log wx log a,log wy log b)
| ab |
15
Bayes Statistical Classifiers
Consideration
Randomness of patterns
Decision criterion
Pattern x is labeled as class wi if
W
W
L p(x / w )P(w ) < L p(x / w )P(w )
ki
k=1
k
k
qj
q
q
q=1
Lij : Misclassification loss function
p(x/wi) : P.d.f. of a particular pattern x comes from class wi
P(wi) : Probability of occurrence of class wi
16
Bayes Statistical Classifiers
Decision criterion :
Given Lij is symmetrical function
Posterior probability decision rule
p(x / wi)P(wi) > p(x / wj)P(wj)
dj(x)= p(x / wj)P(wj)= P(wj / x)
dj(x) : decision functions
Pattern x classifies to class j if dj(x) yields the largest value
17
Bayes Statistical Classifiers
Advantages
Optimization in minimizing the total avarage loss
in miscalssification.
Disadvantages
Both P(wj) and p(x/wj) must be known in advance.
Estimation is required.
Performance highly depends on the assumption of
the distributions.( P(wj) and p(x/wj) )
18
Neural Networks
What is Neural Networks?
Ideas stem from the operation of human neural
networks.
Networks of interconnected nonlinear computing
elements called nurons.
19
Neural Networks
Perceptron : two classes model
Fig.2 Structure of perceptron
20
Neural Networks : Multilayer
Feedforward Neural Networks
Basic structure
Fig.3 Structure of multilayer feedforward neural networks
21
Neural Networks : Multilayer
Feedforward Neural Networks
Training algorithm : back propagation
Sigmoid activation function
1
hj(Ij)=
Nk
-(
1+e
wjkOk+ j)/ 0
k=1
Nk
Ij = wjkOk
k=1
Ok hk ( Ik )
Fig.4 Blowup of a neuron[1]
22
Neural Networks : Multilayer
Feedforward Neural Networks
1. Initialization
Assigning an arbitrary set of weights throughout the
network (not equally).
2. Iterative step
a. Computing Oj for each node by using training vector,
then generating the error terms for output δq, where
= (r - O )h ' ( I ) , rq is the desired response.
b. Backward passing appropriate error signal is passed
to each node and the corresponding weight changes are
made.
q
q
q
q
q
23
Neural Networks
Decision surface complexity
Table2 : Decision surface complexity of multilayer feedforward neural networks[1]
24
Syntactic Recognition
Concerning the structural relation.
Patterns represent in combinations of primitives.
Fig.5 Conceptual diagram of syntactic recognition
25
Syntactic Recognition : String Case
Input to the automata are unknown sentences
generated by the corresponding grammars
respectively.
The grammar G = (N, Σ, P, S)
N is a finite set of variables called nonterminals,
Σ is a finite set of constants called terminals,
P is a set of rewriting rules called productions, and
S in N is called the starting symbol.
26
Syntactic Recognition : String Case
An example
N={A,B,S},Σ={a,b,c}
P={S→ aA, A→ bA, A→ bB, B→C}
S→ aA→ abA→ abbA→ …. →abbbbbc
L(G)={abnc|n≧1}
Fig.6 An example of string language[1]
27
Syntactic Recognition : String Case
The finite automata Af = (Q, Σ, δ, q0, F)
Q is a finite, nonempty set of states,
Σ is a finite input alphabet,
δ is a mapping from Q×Σ into the collection of all
subsets of Q,
q0 is the starting state, and
F is a set of final states.
28
Syntactic Recognition : String Case
A simple automaton
Fig.7 State machine of the automaton[1]
Af = (Q, Σ, δ, q0, F)
Q={q0,q1,q2}
Σ={a, b}
F=q0
δ(q0,a)={q2}
δ(q0,b)={q1}
δ(q1,a)={q2}
δ(q1,b)={q0}
δ(q2,a)={q0}
δ(q2,b)={q1}
Invalid input string : bababbb
Valid input string : aaabbbb
29
Syntactic Recognition : String Case
Conversion between regular grammar and
corresponding automaton states.
G = (N, Σ, P, S)
Af = (Q, Σ, δ, q0, F)
X0≣S
Q={q0,q1,….,qn,qn+1}
N={X0~Xn}
The mappings in δ are obtained by using the following two
rules, for a in Σ ,and each i and j ,with 0≦i≦n, 0≦j≦n,
1.If Xi→aXj is in P, then δ( qi, a) contains qj.
2.If Xi→a is in P, then δ( qi, a) contains qn+1.
30
Syntactic Recognition : String Case
Grammars are not known in advance, we need
to learn the automata from sample patterns.
An unknown grammar G and a finite sets of samples
R+
h( z, R+, k) = {w| zw in R+ ,|w|≦k} , z belongs to Σ*
Q = {q|q = h( z, R+, k) for z in Σ*}
δ( q, a) = {q’ in Q|q’ = h(za, R+, k), with q = h( z, R+, k)}
q0 = h( λ, R+, k)
F = {q| q in Q, λ in q}
31
Syntactic Recognition : String Case
An example of learning automaton structure
from a given sample set R+={a,ab,abb}.( k=1)
Determining h( z, R+, k)
h(λ,R+,1)={w|λw in R+,|w|≦1}
={a}
=q0
z= a
h(a ,R+,1)={w| aw in R+,|w|≦1}
={λ,b}
=q1
z= ab h(ab ,R+,1)={w| abw in R+,|w|≦1}
={λ,b}
=q1
z= abb h(abb ,R+,1)={w| abbw in R+,|w|≦1}
={λ}
=q2
z=λ
λ is a empty string set
32
Syntactic Recognition : String Case
Obtaining mapping function
Q={q0,q1,q2,q3} ,q3 denotes empty set state
h(λ,R+,1) =q0 , z=λ
δ(q0,a)= h(λa,R+,1)= h(a,R+,1)=q1
δ(q0,b)= h(λb,R+,1)= h(b,R+,1)=q3
h(a,R+,1)= h(ab,R+,1) =q1
δ(q1,a)= h(aa,R+,1)= h(aba,R+,1)=q3
δ(q1,b) ⊇ h(ab,R+,1)=q1 δ(q1,b) ⊇ h(abb,R+,1)=q2
δ(q1,b) ={q1,q2}
δ(q2,a) =δ(q2,b) =δ(q3,a) =δ(q3,b) =q3
Obtaining final state F
q1={λ, b} q2={λ}
F={q1, q2}
33
Syntactic Recognition : String Case
State diagram for the finite automaton inferred
from the sample set R+ b
q0
a
b
q1
b
a
q2
a,b
q3
R+={a,ab,abb}
a,b
34
Syntactic Recognition : String Case
Fig.8 Graphic relation between k and L[Af(R+, k + 1 )]
35
Face Recognition
User-friendly pattern recognition application
Weakness of face recognition
Illumination problems
Pose problems( profile or frontal view)
Fig.9 Examples of illumination problems[9]
36
Face Recognition : EigenspaceBased Approach
Eigenspace-based approach
A holistic approach
Reducing the high dimensionality problem ,
and large computational complexity.
x
….
Vectorization
200180
x
360001
..
..
A face image of size 200×180
37
Face Recognition : Standard
Eigenspace-Based Approach
Standard Eigenspace-based approach
Given a set of training face images, computing
the eigenvectors of the distribution of face
images within the entire image space .(PCA
Size of N2×N2
method)
1 M
M n1
Length of N2
1 M
C F F AAT
Size of N2×M
M n1
T
n
n
n
Fi i
A [F1, F 2,...., FM ]
Гn : face vectors
Ψ : Mean vector
C : Covariance matrix of training set
M : Number of training face images
38
Face Recognition : Standard
Eigenspace-Based Approach
C is too big! We can reduce the eigenvlue
value problems from order of N2×N2 to M×M
using the following analysis.
A Avi ivi
T
AA Avi C ( Avi ) i ( Avi )
T
vi : eigenvectors of ATA
μi : eigenvalues of ATA and C
Avi : eigenvectors of C
39
Face Recognition : Standard
Eigenspace-Based Approach
Fig.11 Mean face
Fig.10 Training set
40
Face Recognition : Standard
Eigenspace-Based Approach
Fig.12 Eigenfaces
41
Face Recognition : Standard
Eigenspace-Based Approach
Operation of S.E. approach
A new face image Γ
wk uk ( )
T
[ w1, w2,..., wM ']
T
uk : eigenvectors
M’ : Number of reduced eigenvectors
Comparing two Euclidian distances
( k )
2
(F F f )
2
2
k
2
Ωk : Prototype weight vector of each class k
42
Face Recognition : Standard
Eigenspace-Based Approach
Four possibilities
<1>Near face space and near a face class.
<2>Near face space but not near a known face class.
<3>Distant from face space and near a face class.
<4>Distant from face space and not near a known face class.
Fig.13 Geometric relationship betweenεk and ε.
43
Face Recognition : FLD EigenspaceBased Approach
FLD(Fisher Linear Discriminant)
Another
method that searches for the projection
axes.
Face images of different classes are far from each
other (similar to PCA), and at the same time where
the images of a same class are close from each other.
44
Face Recognition : FLD EigenspaceBased Approach
Fig.14 Comparison between PCA and FLD[9]
45
Face Recognition : FLD EigenspaceBased Approach
Mathematical Expression
Selecting projection unitary vector u s.t. (u) to be maximized
uT Sbu
(u ) T
u Swu
NC
Sb P(Ci )(m(i ) m)(m(i ) m)T
i 1
NC
Sw P (Ci ) E[( x(i ) m(i ))( x(i ) m(i ))T ]
i 1
Sb : Measuring the separation between the individual class means respect to the global mean face
Sw : Measuring the separation between vectors of each class respect to their own class mean
Using Lagrange multiplier and set uTSwu=1 be the constraint condition
Sbwk kSwwk
: Generalized eigenvalue problem
46
Conclusions
Template matching is simple to implement but the
template size must be small to decrease computational
delay.
Statistical methods highly depends on the assumption
of distribution.
Neural networks can adaptively refine the classifier and
the decision surface in principle can be arbitrarily
implemented .
Syntactic methods concerned structural sense to
encode but additional process to define primitives are
required.
47
Future Works
Frequency domain or Wavelet domain
Image compression method to face recognition
Video-based face recognition
Adding color factor into face recognition
48
References
[1] R.C.Gonzalez,R.E.Woods,”Digital Image Processing(Second
Edition”,Prentice-Hall,Inc,2002,pp.693-750.
[2] W. K. Pratt,”Digital Image Processing : PIKS Inside(Third
Edition)”, John Wiley & Sons,Inc,2001,pp.613-637.
[3] M. Turk and A. Pentland,”Eigenfaces for Recognition”, J. Cogn.
Neurosci.,vol. 3, no. 1, pp. 71–86, 1991.
[4] Kah-Kay Sung and T. Poggio,” Example-Based Learning for
View-Based Human Face Detection”, IEEE Trans. on Pattern
Analysis and Machine Iintelligence, Vol. 20, No. 1,pp. 39-51 January
1998.
49
References
[5] W. Zhao, R. Chellappa, A. Rosenfeld, P.J. Phillips, ”Face
Recognition: A Literature Survey”, ACM Computing Surveys,
2003, pp. 399-458.
[6] J. Ruiz-del-Solar, P. Navarrete, ” Eigenspace-Based Face
Recognition: A Comparative Study of Different Approaches”,
IEEE Trans. on Systems, Man and Cybernetics—Part C: Applications
and Reviews, Vol. 35, No. 3, pp. 315-325 August 2005
[7] P. Sinha, B. Balas, Y. Ostrovsky, and R. Russell, ”Face
Recognition by Humans: Nineteen Results All Computer Vision
Researchers Should Know About”, Proceedings of the IEEE , Vol.
94, No. 11,pp. 1948-1962 November 2006.
50
References
[8]R. O. Duda, P. E. Hart, and D. G. Stork, Pattern Classification, John
Wiley & Sons, 2001.
[9]P.N.Belhumeur,J.P.Hespanha,D.J.Kriegman,Eigenfaces vs.
Fisherfaces : Recognition Using Class Specific Linear Projection.
51