diesel heating and air conditioning
advertisement

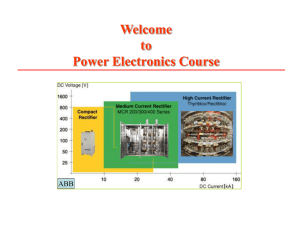
DIESEL HEATING AND AIR CONDITIONING 5MARKS 1. Heat-end equipment Baggage car Although passengers generally were not allowed access to the baggage car, they were included in a great number of passenger trains as regular equipment. The baggage car is a car that was normally placed between the train's motive power and the remainder of the passenger train. The car's interior is normally wide open and is used to carry passengers' checked baggage. Baggage cars were also sometimes commissioned by freight companies to haul less-than-carload (LCL) shipments along passenger routes (Railway Express Agency was one such freight company). Some baggage cars included restroom facilities for the train crew, so many baggage cars had doors to access them just like any other passenger car. Baggage cars could be designed to look like the rest of a passenger train's cars, or they could be repurposed box cars equipped with highspeed trucks and passenger train steam and air connections. Express car Express cars carried high value freight in passenger consists. These cars resembled baggage cars, though in some cases specially equipped box cars or refrigerator cars were used. Horse car Main article: Stock car (rail)#Horse cars Specialized stock cars were used to transport horses and other high value livestock as part of passenger consists. Similar equipment is used in circus trains to transport their animals. Prisoner car In some countries, convicts are transported from court to prison or from prison to another by railway. In such transportation a specific type of coach, prisoner car, is used. It contains several cell compartments with minimal interior and commodities, and a separate guard compartment. Usually the windows are of nontransparent opaque glass to prevent prisoners from seeing outside and determine where they are, and windows usually also have bars to prevent escapes. Unlike other passenger cars, prisoner cars do not have doors at the ends of the wagon. Railway post office The interior of an RPO on display at the National Railroad Museum in Green Bay, Wisconsin.Like baggage cars, railway post office (RPO) cars or travelling post offices (TPOs) were not accessible to paying passengers. These cars' interiors were designed with sorting facilities that were often seen and used in conventional post offices around the world. The RPO is where mail was sorted while the train was en route. Because these cars carried mail, which often included valuables or quantities of cash and checks, the RPO staff (who were employed by the postal service and not the railroad) were the only train crews allowed to carry guns. The RPO cars were normally placed in a passenger train between the train's motive power and baggage cars, further inhibiting their access by passengers. 2. Heavyweight vs. lightweight A heavyweight car is one that is physically heavier than a lightweight car due to its construction. While early cars used wood construction, Pullman switched to heavyweight riveted steel construction in 1910, more or less at the same time as other rail car manufacturers. Heavyweights are said[by whom?] to offer a more luxurious ride due to their added mass (from the plate steel construction and concrete floor) and, usually, six-wheeled trucks (bogies). The stepped roof line of early heavyweights usually consisted of a center sill section (the clerestory) that ran the length of the car and extended above the roof sides by as much as a foot. This section of the roof usually had windows or shutters that could be opened for ventilation while the train was in motion. However, railroad crews and passengers quickly discovered that when these windows were opened on a passenger train pulled by one or more steam locomotives, smoke and soot from the locomotives tended to drift in through the windows, especially when the train went through a tunnel. In the early 20th century, air conditioning was added to heavyweight cars for the first time. An air conditioned heavyweight car could be spotted easily since the area where the roof vent windows existed was now covered, either partially or in full, by the AC duct. As lightweight cars were introduced, many heavyweight cars were repurposed into maintenance of way service by the railroads that owned them. Lightweight passenger cars required developments in steel processing that weren't available until the 1920s and 1930s. By building passenger cars out of steel instead of wood, the manufacturers were able to build lighter weight cars with smooth or fluted sides and smooth roof lines. Steel cars were ushered in at the beginning of the streamline era of the 1930s (although not all lightweight cars were streamlined) and steel has continued in use ever since then. With the use of steel for the car sides, railroads were able to offer more innovative passenger car types. It wasn't until after the first lightweight cars were introduced that railroads began building and using dome cars because the sides of heavyweight cars weren't strong enough to support the weight of the dome and its passengers. Lightweight cars also enabled the railroads to operate longer passenger trains; the reduced car weight meant that more passengers could be carried in a greater number of cars with the same locomotives. The cost savings in hauling capacity coupled with the increased car type options led to the quick replacement of heavyweight cars with lightweight cars. 3.Automotive Service Excellence National Institute for Automotive Service Excellence (ASE) is a professional certification group that certifies professionals in the automotive repair and service industry. It is an independent, non-profit organization created in 1972[1] in response to consumers needing to distinguish between incompetent and competent automotive technicians.[2] The organization aims to improve the quality of vehicle repair and service through the testing and certification of repair and service professionals. ASE Certification ASE offers certification tests for automotive professionals at 750 locations around the country administered by ACT, Inc. These involve several exams, the passing of which, added with two years of relevant hands-on work experience, will merit certification.[3] Some forms of formal training will also satisfy part of the 2 year work experience requirement. A re-certification track is also offered for those who have had previous certification. An ASE certificate serves as proof of one's competence and effectiveness. Upon certification, the certified applicant will also receive an ASE shoulder insignia, wallet I.D. card and a wall certificate suitable for framing. ASE certification is usually required (not by law but by employers) for those interested in pursuing a career in automotive mechanic/auto mechanic or automotive technician service. Some municipalities require ASE certification in order to be licensed for motor vehicle repairs, such as Broward[4] and Miami-Dade[5] Counties. Testing was previously done twice a year for the written version. All ASE tests are now computer based and are administered at monitored testing centers. The tests are now offered more frequently and at more locations. Additionally ASE certification is not just for technicians anymore and apply to all manner of jobs relating to the Automotive Industry. And also it is useful in entering in to reputed Automotive Industries 20MARKS 1.HVDC converter station An HVDC converter station (or simply converter station) is a specialised type of substation which forms the terminal equipment for a high-voltage direct current transmission line.[1] It converts direct current to alternating current or the reverse. Besides the converter itself, the station usually contains: three-phase alternating current switch gear transformers capacitors or synchronous condensers for reactive power filters for harmonic suppression, and direct current switch gear Components Converter. The converter is usually installed in a building called the valve hall. Early HVDC systems used mercury-arc valves, but since the mid 1970s, solid state devices such as thyristors are used. Converters using thyristors or mercury-arc valves are known as line commutated converters. In thyristor-based converters, many thyristors are connected in series to form a thyristor valve and each converter normally consists of six or twelve thyristor valves. The thyristor valves are usually grouped in pairs or groups of four and can stand on insulators on the floor or hang from insulators from the ceiling. Line commutated converters require voltage from the AC network for commutation, but since the late 1990s, voltage sourced converters have started to be used for HVDC. Voltage sourced converters use insulated-gate bipolar transistors instead of thyristors and can provide power to a deenergized AC system. Almost all converters used for HVDC are intrinsically able to operate with power conversion in either direction. Power conversion from AC to DC is known as rectification and conversion from DC to AC is known as inversion. DC equipment The direct current equipment often includes a coil (called a reactor) that adds inductance in series with the DC line to help smooth the direct current. The inductance typically amounts to between 0.1 H and 1 H. The smoothing reactor can have either an air-core or an iron-core. Ironcore coils look like oil-filled high voltage transformers. Air-core smoothing coils resemble, but are considerably larger than, carrier frequency choke coils in high voltage transmission lines and are supported by insulators. Air coils have the advantage of generating less acoustical noise than iron-core coils, they eliminate the potential environmental hazard of spilled oil, and they do not saturate under transient high current fault conditions. This part of the plant will also contain instruments for measurement of direct current and voltage. Special direct current filters are used to eliminate high frequency interference. Such filters are required if the transmission line will use Power line communication techniques for communication and control, or if the overhead line will run through populated areas. These filters can be passive LC filters or active filters, consisting of an amplifier coupled through transformers and protection capacitors, which gives a signal out of phase to the interference signal on the line, thereby cancelling it. Such a system was used on the Baltic Cable HVDC project. Converter transformer The converter transformers step up the voltage of the AC supply network. By using a star-delta (US: wye-delta) connection, the converter can operate with 12 pulses in each cycle of the AC supply, which eliminates numerous harmonic current components. The insulation of the transformer windings must be specially designed to withstand a large DC potential to earth. Converter transformers can be built as large as 300 MVA as a single unit. It is impractical to transport larger transformers so when larger ratings are required, several individual transformers are connected together. Either two three-phase units or three single-phase units can be used. With the latter variant only one type of transformer is used, making the supply of a spare transformer more economical. Converter transformers operate with high flux Power Steps In the Four Steps of the Converter per cycle, and so produce more acoustic noise than normal three-phase power transformers. This effect should be considered in the siting of an HVDC converter station. Noise-reducing enclosures may be applied. Reactive Power When line commutated converters are used, the converter station will require between 40% and 60% of its power rating as reactive power. This can be provided by banks of switched capacitors or by synchronous condensers, or if a suitable power generating station is located close to the static inverter plant, the generators in the power station. The demand for reactive power can be reduced if the converter transformers have on-load tap changers with a sufficient range of taps for AC voltage control. Some of the reactive power requirement can be supplied in the harmonic filter components. Voltage sourced converters can generate or absorb reactive as well as real power, and additional reactive power equipment is generally not needed. Harmonic filters Harmonic filters are necessary for the elimination of the harmonic waves and for the production of the reactive power at line commutated converter stations. At plants with six pulse line commutated converters, complex harmonic filters are necessary because there are odd numbered harmonics of the orders and produced on the AC side and even harmonics of order on the DC side. At 12 pulse converter stations, only harmonic voltages or currents of the order and (on the AC side) or (on the DC side) result. Filters are tuned to the expected harmonic frequencies and consist of series combinations of capacitors and inductors. Voltage sourced converters generally produce lower intensity harmonics than line commutated converters. As a result, harmonic filters are generally smaller or may be omitted altogether. Beside the harmonic filters, equipment is also provided to eliminate spurious signals in the frequency range of power-line carrier equipment in the range of 30 kHz to 500 kHz. These filters are usually near the alternating current terminal of the static inverter transformer. They consist of a coil which passes the load current, with a parallel capacitor to form a resonant circuit. In special cases, it may be possible to use exclusively machines for generating the reactive power. This is realized at the terminal of HVDC Volgograd-Donbass situated on Volga Hydroelectric Station. AC switchgear The three-phase alternating current switch gear of a converter station is similar to that of an AC substation. It will contain circuit breakers for overcurrent protection of the converter transformers, isolating switches, grounding switches, and instrument transformers for control, measurement and protection. The station will also have lightning arresters for protection of the AC equipment from lightning surges on the AC system. 2. VFD types and ratings Generic topologies Topology of VSI drive Topology of CSI drive Six-step drive waveforms Topology of direct matrix converter AC drives can be classified according to the following generic topologies:[c][41][42] Voltage-source inverter (VSI) drive topologies (see image): In a VSI drive, the DC output of the diode-bridge converter stores energy in the capacitor bus to supply stiff voltage input to the inverter. The vast majority of drives are VSI type with PWM voltage output.[d] Current-source inverter (CSI) drive topologies (see image): In a CSI drive, the DC output of the SCR-bridge converter stores energy in series-reactor connection to supply stiff current input to the inverter. CSI drives can be operated with either PWM or six-step waveform output. Six-step[e] inverter drive topologies (see image):[43] Now largely obsolete, six-step drives can be either VSI or CSI type and are also referred to as variable-voltage inverter drives, pulse-amplitude modulation (PAM) drives,[44] square-wave drives or D.C. chopper inverter drives.[45] In a six-step drive, the DC output of the SCR-bridge converter is smoothed via capacitor bus and series-reactor connection to supply via Darlington Pair or IGBT inverter quasi-sinusoidal, six-step voltage or current input to an induction motor.[46] Load commutated inverter (LCI) drive topologies: In a LCI drive, a special CSI case, the DC output of the SCR-bridge converter stores energy via DC link inductor circuit to supply stiff quasi-sinusoidal six-step current output of a second SCR-bridge's inverter and an over-excited synchronous machine. Cycloconverter or matrix converter (MC) topologies (see image): Cycloconverters and MCs are AC-AC converters that have no intermediate DC link for energy storage. A cycloconverter operates as a three-phase current source via three anti-parallel connected SCR-bridges in six-pulse configuration, each cycloconverter phase acting selectively to convert fixed line frequency AC voltage to an alternating voltage at a variable load frequency. MC drives are IGBT-based. Doubly fed slip[f] recovery system topologies: A doubly fed slip recovery system feeds rectified slip power to a smoothing reactor to supply power to the AC supply network via an inverter, the speed of the motor being controlled by adjusting the DC current. Control platforms See also: Dqo transformation and Alpha–beta transformation Most drives use one or more of the following control platforms:[41][47] PWM V/Hz scalar control PWM field-oriented control (FOC) or vector control Direct torque control (DTC). Load torque and power characteristics Variable frequency drives are also categorized by the following load torque and power characteristics: Variable torque, such as in centrifugal fan, pump and blower applications Constant torque, such as in conveyor and displacement pump applications Constant power, such as in machine tool and traction applications. Available power ratings VFDs are available with voltage and current ratings covering a wide range of single-phase and multi-phase AC motors. Low voltage (LV) drives are designed to operate at output voltages equal to or less than 690 V. While motor-application LV drives are available in ratings of up to the order of 5 or 6 MW,[48] economic considerations typically favor medium voltage (MV) drives with much lower power ratings. Different MV drive topologies (see Table 2) are configured in accordance with the voltage/current-combination ratings used in different drive controllers' switching devices[49] such that any given voltage rating is greater than or equal to one to the following standard nominal motor voltage ratings: generally either 2.3/4.16 kV (60 Hz) or 3.3/6.6 kV (50 Hz), with one thyristor manufacturer rated for up to 12 kV switching. In some applications a step up transformer is placed between a LV drive and a MV motor load. MV drives are typically rated for motor applications greater than between about 375 kW (500 hp) and 750 kW (1000 hp). MV drives have historically required considerably more application design effort than required for LV drive applications.[50][51] The power rating of MV drives can reach 100 MW, a range of different drive topologies being involved for different rating, performance, power quality and reliability requirements.[52][53][54] Drives by machines & detailed topologies It is lastly useful to relate VFDs in terms of the following two classifications: In terms of various AC machines as shown in Table 1 below[55][56] In terms of various detailed AC-AC converter topologies shown in Tables 2 and 3 below. 3.System description and operation VFD system A variable frequency drive is a device used in a drive system consisting of the following three main sub-systems: AC motor, main drive controller assembly, and drive operator interface.[5][4] AC Motor The AC electric motor used in a VFD system is usually a three-phase induction motor. Some types of single-phase motors can be used, but three-phase motors are usually preferred. Various types of synchronous motors offer advantages in some situations, but three phase induction motors are suitable for most purposes and are generally the most economical choice. Motors that are designed for fixed-speed operation are often used. Elevated voltage stresses imposed on induction motors that are supplied by VFDs require that such motors be designed for definitepurpose inverter-fed duty in accordance to such requirements as Part 31 of NEMA Standard MG1.[6] Controller The variable frequency drive controller is a solid state power electronics conversion system consisting of three distinct sub-systems: a rectifier bridge converter, a direct current (DC) link, and an inverter. Voltage-source inverter (VSI) drives (see 'Generic topologies' sub-section below) are by far the most common type of drives. Most drives are AC-AC drives in that they convert AC line input to AC inverter output. However, in some applications such as common DC bus or solar applications, drives are configured as DC-AC drives. The most basic rectifier converter for the VSI drive is configured as a three-phase, six-pulse, full-wave diode bridge. In a VSI drive, the DC link consists of a capacitor which smooths out the converter's DC output ripple and provides a stiff input to the inverter. This filtered DC voltage is converted to quasisinusoidal AC voltage output using the inverter's active switching elements. VSI drives provide higher power factor and lower harmonic distortion than phase-controlled current-source inverter (CSI) and load-commutated inverter (LCI) drives (see 'Generic topologies' sub-section below). The drive controller can also be configured as a phase converter having single-phase converter input and three-phase inverter output.[7] Controller advances have exploited dramatic increases in the voltage and current ratings and switching frequency of solid state power devices over the past six decades. Introduced in 1983,[8] the insulated-gate bipolar transistor (IGBT) has in the past two decades come to dominate VFDs as an inverter switching device.[9][10][11] In variable-torque applications suited for Volts per Hertz (V/Hz) drive control, AC motor characteristics require that the voltage magnitude of the inverter's output to the motor be adjusted to match the required load torque in a linear V/Hz relationship. For example, for 460 volt, 60 Hz motors this linear V/Hz relationship is 460/60 = 7.67 V/Hz. While suitable in wide ranging applications, V/Hz control is sub-optimal in high performance applications involving low speed or demanding, dynamic speed regulation, positioning and reversing load requirements. Some V/Hz control drives can also operate in quadratic V/Hz mode or can even be programmed to suit special multi-point V/Hz paths.[12][13] The two other drive control platforms, vector control and direct torque control (DTC), adjust the motor voltage magnitude, angle from reference and frequency[14] such as to precisely control the motor's magnetic flux and mechanical torque. Although space vector pulse-width modulation (SVPWM) is becoming increasingly popular,[15] sinusoidal PWM (SPWM) is the most straightforward method used to vary drives' motor voltage (or current) and frequency. With SPWM control (see Fig. 1), quasi-sinusoidal, variable-pulsewidth output is constructed from intersections of a saw-toothed carrier frequency signal with a modulating sinusoidal signal which is variable in operating frequency as well as in voltage (or current).[16][9][17] Operation of the motors above rated nameplate speed (base speed) is possible, but is limited to conditions that do not require more power than the nameplate rating of the motor. This is sometimes called "field weakening" and, for AC motors, means operating at less than rated V/Hz and above rated nameplate speed. Permanent magnet synchronous motors have quite limited field weakening speed range due to the constant magnet flux linkage. Wound rotor synchronous motors and induction motors have much wider speed range. For example, a 100 hp, 460 V, 60 Hz, 1775 RPM (4 pole) induction motor supplied with 460 V, 75 Hz (6.134 V/Hz), would be limited to 60/75 = 80% torque at 125% speed (2218.75 RPM) = 100% power.[18] At higher speeds the induction motor torque has to be limited further due to the lowering of the breakaway torque[a] of the motor. Thus rated power can be typically produced only up to 130...150% of the rated nameplate speed. Wound rotor synchronous motors can be run at even higher speeds. In rolling mill drives often 200...300% of the base speed is used. The mechanical strength of the rotor limits the maximum speed of the motor. Fig. 1: SPWM carrier-sine input & 2-level PWM output An embedded microprocessor governs the overall operation of the VFD controller. Basic programming of the microprocessor is provided as user inaccessible firmware. User programming of display, variable and function block parameters is provided to control, protect and monitor the VFD, motor and driven equipment.[9][19] The basic drive controller can be configured to selectively include such optional power components and accessories as follows: Connected upstream of converter - circuit breaker or fuses, isolation contactor, EMC filter, line reactor, passive filter Connected to DC link - braking chopper, braking resistor Connected downstream of inverter - output reactor, sine wave filter, dV/dt filter.[b][21] Operator interface The operator interface provides a means for an operator to start and stop the motor and adjust the operating speed. Additional operator control functions might include reversing, and switching between manual speed adjustment and automatic control from an external process control signal. The operator interface often includes an alphanumeric display and/or indication lights and meters to provide information about the operation of the drive. An operator interface keypad and display unit is often provided on the front of the VFD controller as shown in the photograph above. The keypad display can often be cable-connected and mounted a short distance from the VFD controller. Most are also provided with input and output (I/O) terminals for connecting pushbuttons, switches and other operator interface devices or control signals. A serial communications port is also often available to allow the VFD to be configured, adjusted, monitored and controlled using a computer.[9][22][23] Drive operation Electric motor speed-torque chart Referring to the accompanying chart, drive applications can be categorized as single-quadrant, two-quadrant or four-quadrant; the chart's four quadrants are defined as follows:[24][25][26] Quadrant I - Driving or motoring[27], forward accelerating quadrant with positive speed and torque Quadrant II - Generating or braking, forward braking-decelerating quadrant with positive speed and negative torque Quadrant III - Driving or motoring, reverse accelerating quadrant with negative speed and torque Quadrant IV - Generating or braking, reverse braking-decelerating quadrant with negative speed and positive torque. Most applications involve single-quadrant loads operating in quadrant I, such as in variabletorque (e.g. centrifugal pumps or fans) and certain constant-torque (e.g. extruders) loads. Certain applications involve two-quadrant loads operating in quadrant I and II where the speed is positive but the torque changes polarity as in case of a fan decelerating faster than natural mechanical losses. Some sources define two-quadrant drives as loads operating in quadrants I and III where the speed and torque is same (positive or negative) polarity in both directions. Certain high-performance applications involve four-quadrant loads (Quadrants I to IV) where the speed and torque can be in any direction such as in hoists, elevators and hilly conveyors. Regeneration can only occur in the drive's DC link bus when inverter voltage is smaller in magnitude than the motor back-EMF and inverter voltage and back-EMF are the same polarity.[28] In starting a motor, a VFD initially applies a low frequency and voltage, thus avoiding high inrush current associated with direct on line starting. After the start of the VFD, the applied frequency and voltage are increased at a controlled rate or ramped up to accelerate the load. This starting method typically allows a motor to develop 150% of its rated torque while the VFD is drawing less than 50% of its rated current from the mains in the low speed range. A VFD can be adjusted to produce a steady 150% starting torque from standstill right up to full speed.[29] However, motor cooling deteriorates and can result in overheating as speed decreases such that prolonged low speed motor operation with significant torque is not usually possible without separately-motorized fan ventilation. With a VFD, the stopping sequence is just the opposite as the starting sequence. The frequency and voltage applied to the motor are ramped down at a controlled rate. When the frequency approaches zero, the motor is shut off. A small amount of braking torque is available to help decelerate the load a little faster than it would stop if the motor were simply switched off and allowed to coast. Additional braking torque can be obtained by adding a braking circuit (resistor controlled by a transistor) to dissipate the braking energy. With a four-quadrant rectifier (activefront-end), the VFD is able to brake the load by applying a reverse torque and injecting the energy back to the AC line. 4.Thermodynamics A rigorous treatment of OTEC reveals that a 20 °C temperature difference will provide as much energy as a hydroelectric plant with 34 m head for the same volume of water flow. The low temperature difference means that water volumes must be very large to extract useful amounts of heat. A 100MW power plant would be expected to pump on the order of 12 million gallons (44,400 metric tonnes) per minute.[27] For comparison, pumps must move a mass of water greater than the weight of the Battleship Bismark, which weighed 41,700 metric tons, every minute. This makes pumping a substantial parasitic drain on energy production in OTEC systems, with one Lockheed design consuming 19.55 MW in pumping costs for every 49.8 MW net electricity generated. For OTEC schemes using heat exchangers, to handle this volume of water the exchangers need to be enormous compared to those used in conventional thermal power generation plants,[28] making them one of the most critical components due to their impact on overall efficiency. A 100 MW OTEC power plant would require 200 exchangers each larger than a 20 foot shipping container making them the single most expensive component.[29] Variation of ocean temperature with depth The total insolation received by the oceans (covering 70% of the earth's surface, with clearness index of 0.5 and average energy retention of 15%) is: 5.45×1018 MJ/yr × 0.7 × 0.5 × 0.15 = 2.87×1017 MJ/yr We can use Lambert's law to quantify the solar energy absorption by water, where, y is the depth of water, I is intensity and μ is the absorption coefficient. Solving the above differential equation, The absorption coefficient μ may range from 0.05 m−1 for very clear fresh water to 0.5 m−1 for very salty water. Since the intensity falls exponentially with depth y, heat absorption is concentrated at the top layers. Typically in the tropics, surface temperature values are in excess of 25 °C (77 °F), while at 1 kilometer (0.62 mi), the temperature is about 5–10 °C (41–50 °F). The warmer (and hence lighter) waters at the surface means there are no thermal convection currents. Due to the small temperature gradients, heat transfer by conduction is too low to equalize the temperatures. The ocean is thus both a practically infinite heat source and a practically infinite heat sink. This temperature difference varies with latitude and season, with the maximum in tropical, subtropical and equatorial waters. Hence the tropics are generally the best OTEC locations. Open/Claude cycle In this scheme, warm surface water at around 27 °C (81 °F) enters an evaporator at pressure slightly below the saturation pressures causing it to vaporize. Where Hf is enthalpy of liquid water at the inlet temperature, T1. This temporarily superheated water undergoes volume boiling as opposed to pool boiling in conventional boilers where the heating surface is in contact. Thus the water partially flashes to steam with two-phase equilibrium prevailing. Suppose that the pressure inside the evaporator is maintained at the saturation pressure, T2. Here, x2 is the fraction of water by mass that vaporizes. The warm water mass flow rate per unit turbine mass flow rate is 1/x2. The low pressure in the evaporator is maintained by a vacuum pump that also removes the dissolved non-condensable gases from the evaporator. The evaporator now contains a mixture of water and steam of very low vapor quality (steam content). The steam is separated from the water as saturated vapor. The remaining water is saturated and is discharged to the ocean in the open cycle. The steam is a low pressure/high specific volume working fluid. It expands in a special low pressure turbine. Here, Hg corresponds to T2. For an ideal isentropic (reversible adiabatic) turbine, The above equation corresponds to the temperature at the exhaust of the turbine, T5. x5,s is the mass fraction of vapor at state 5. The enthalpy at T5 is, This enthalpy is lower. The adiabatic reversible turbine work = H3-H5,s . Actual turbine work WT = (H3-H5,s) x polytropic efficiency The condenser temperature and pressure are lower. Since the turbine exhaust is to be discharged back into the ocean, a direct contact condenser is used to mix the exhaust with cold water, which results in a near-saturated water. That water is now discharged back to the ocean. H6=Hf, at T5. T7 is the temperature of the exhaust mixed with cold sea water, as the vapour content now is negligible, The temperature differences between stages include that between warm surface water and working steam, that between exhaust steam and cooling water, and that between cooling water reaching the condenser and deep water. These represent external irreversibilities that reduce the overall temperature difference. The cold water flow rate per unit turbine mass flow rate, Turbine mass flow rate, Warm water mass flow rate, Cold water mass flow rate Closed Anderson cycle Developed starting in the 1960s by J. Hilbert Anderson of Sea Solar Power, Inc. In this cycle, QH is the heat transferred in the evaporator from the warm sea water to the working fluid. The working fluid exits the evaporator as a gas near its dew point. The high-pressure, high-temperature gas then is expanded in the turbine to yield turbine work, WT. The working fluid is slightly superheated at the turbine exit and the turbine typically has an efficiency of 90% based on reversible, adiabatic expansion. From the turbine exit, the working fluid enters the condenser where it rejects heat, -QC, to the cold sea water. The condensate is then compressed to the highest pressure in the cycle, requiring condensate pump work, WC. Thus, the Anderson closed cycle is a Rankine-type cycle similar to the conventional power plant steam cycle except that in the Anderson cycle the working fluid is never superheated more than a few degrees Fahrenheit. Owing to viscous effects, working fluid pressure drops in both the evaporator and the condenser. This pressure drop, which depends on the types of heat exchangers used, must be considered in final design calculations but is ignored here to simplify the analysis. Thus, the parasitic condensate pump work, WC, computed here will be lower than if the heat exchanger pressure drop was included. The major additional parasitic energy requirements in the OTEC plant are the cold water pump work, WCT, and the warm water pump work, WHT. Denoting all other parasitic energy requirements by WA, the net work from the OTEC plant, WNP is The thermodynamic cycle undergone by the working fluid can be analyzed without detailed consideration of the parasitic energy requirements. From the first law of thermodynamics, the energy balance for the working fluid as the system is where WN = WT + WC is the net work for the thermodynamic cycle. For the idealized case in which there is no working fluid pressure drop in the heat exchangers, and so that the net thermodynamic cycle work becomes Subcooled liquid enters the evaporator. Due to the heat exchange with warm sea water, evaporation takes place and usually superheated vapor leaves the evaporator. This vapor drives the turbine and the 2-phase mixture enters the condenser. Usually, the subcooled liquid leaves the condenser and finally, this liquid is pumped to the evaporator completing a cycle. Environmental impact Carbon dioxide dissolved in deep cold and high pressure layers is brought up to the surface and released as the water warms.[citation needed] Mixing of deep ocean water with shallower water brings up nutrients and makes them available to shallow water life. This may be an advantage for aquaculture of commercially important species, but may also unbalance the ecological system around the power plant.