5-2 The Center of Mass
advertisement

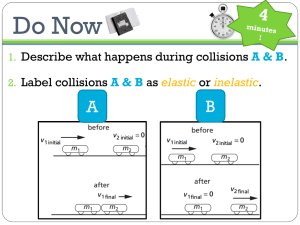
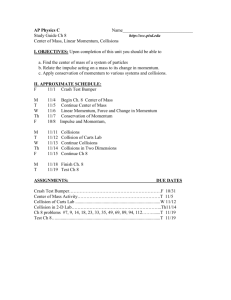
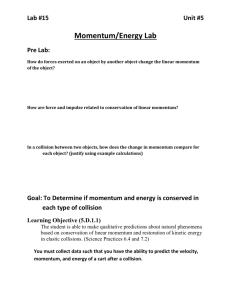
Bilingual Mechanics Chapter 5 Center of Mass and Linear Momentum 制作 张昆实 制作 张昆实 赵 俊 Yangtze University Yangtze University Chapter 5 Center of Mass and Linear Momentum 5-1 What Is Physics? 5-2 The Center of Mass 5-3 Newton’s Second Law for a System of Particles 5-4 Linear Momentum 5-5 The Linear Momentum of a System of Particles 5-6 Collision and Impulse Chapter 5 Center of Mass and Linear Momentum 5-7 Conservation of Linear Momentum 5-8 Momentum and Kinetic Energy in Collisions 5-9 Inelastic Collisions in One Dimension 5-10 Elastic Collisions in One Dimension 5-11 Collisions in Two Dimensions 5-12 Systems with Varying Mass: A Rocket 5-1 What Is Physics ★ Analyzing complicated motion requires simplification via an understanding of physics. ★ We discuss how the complicated motion of a system of objects can be simplified if we determine a special point of the system the center of mass of that system. ★ In this chapter we learn what is physics through studying linear momentum and collisions. 5-2 The Center of Mass If we toss a small ball into the air, it will follow a parabolic path. What about a grenade? 5-2 The Center of Mass Every part of the grenade moves in a different way except one special point, the center of mass, of the grenade,which still moves in a parabolic path . The center of mass of a system of particles is the point that moves as though (1) all the system’s mass were concentrated there and (2) all external forces were applied there. 5-2 The Center of Mass Systems of Particles The position of the center of mass (com) of this two-particle system can be difined as: y m2 xcom Discuss (1) if m2 m1 m2 0 , d xcom 0 (5-1) xcom m2 m1 d (Fig.5-2a) the center of mass lies at the position of (2) If m1 0 , xcom d m1 the center of mass lies at the position of m2 (3) If m1 m2 , xcom 1 2 d the center of mass shuld be halfway between them. x 5-2 The Center of Mass For a more generalized situation, in which the coordinate system has been shifted leftward. y xcom xcom x1m1 x2 m2 m1 m2 (5-2) o m1 x1 x2 d m2 x (Fig. 5-2b) Note: in spite of the shift of the coordinate system, the center of mass is still the same distance from each particle. xcom x1m1 x2 m2 M (5-3) ( M m1 m2 ) For a system of n particles xcom x1m1 x2 m2 M xn mn 1 M n m x i 1 i i (5-4) 5-2 The Center of Mass If particles are distributed in three dimensions, the center of mass must be identified by three coordinates: xcom 1 M n mi xi i 1 ycom 1 M n m y i 1 i i zcom 1 M n m z i 1 i i (5-5) Define the center of mass with the language of vectors. The position of a particle is given by a position vector: ri xi i yi j zi k (5-6) The position of the center of mass of a system of particles is given by a position vector: rcom xcom i ycom j zcom k (5-7) 5-2 The Center of Mass The three scalar equation of 1 Eq.5-5 can be replaced by a rcom M single vector equation n m r i 1 i i (5-8) Solid Bodies An ordinary solid object contains many particles, can be treated as a continuous distribution of matter. m dm ( differential mass elements ) sum→integral 1 1 m x y i i com M i 1 M 1 n xcom zcom mi zi (5-5) mi yi M i 1 i 1 the coordinates of the center of mass will be 1 1 1 zcom zdm (5-9) ycom ydm xcom xdm M M M n n 5-2 The Center of Mass We consider only uniform objects (uniform density ) dm M dV V Substitute dm (M V )dV xcom 1 xdV V ycom (5-10) into Eq.5-9 gives 1 ydV V zcom 1 zdV V (5-11) We can bypass one or more of these integrals if an object has a point, a line, or a plane of symmetry. The center of mass of such an object then lies at that point, or that line, or in that plane. Note: the center of mass of an object need not lie winthin the object. 5-3 Newton’s Second Law for a System of Particles If we roll a cue ball at a second billiard ball that is at rest, How do they move after inpact? the second billiard ball In fact, what continues to move forward is the center of mass of the two-ball system. The center of mass moves like a particle whose mass is equal to the total mass of the system. Then,the motion of it will be governed by Eq.(5-14) Note: Fnet Macom cue ball (Newton’s Second Law ) (5-14) (1) Fnet is the net force of all external forces acted on the system. (2) M is the total mass of the system. 5-3 Newton’s Second Law for a System of Particles (3) acom is the acceleration of the center of mass of the system. Eq.5-14 is equivalent to three equations along the three coordinate axes. (5-14) F Ma net Fnet , x Macom, x com Fnet , y Macom, y Fnet , z Macom, z (5-15) Go back and examine the behavior of the billiard balls. The cue ball has begun to roll no net external force acts on the system Fnet 0 acom 0 Fnet 0 acom 0 internal forces Two balls collide don’t contribute to the net force Thus, the center of mass must still move forward after the collision with the same speed and in the same direction. 5-3 Newton’s Second Law for a System of Particles Newton’s Second Law applies not only to a system of particles but also to a solid body. Proof of Equation 5-14 From For a system of n particles, rcom 1 M Mrcom m1r1 m2 r2 m3r3 n m r i 1 i i mn rn (5-8) (5-16) Differentiating Eq.5-16 with respect to time gives Mvcom m1v1 m2v2 m3v3 mnvn (5-17) Differentiating Eq.5-17 with respect to time leads to Macom m1a1 m2 a2 m3a3 mn an (5-18) We can rewrite Eq.5-18 as Macom F1 F2 F3 Fn Fnet (5-19) 5-4 Linear Momentum The linear momentum of a particle is a vector quantity p , defined as p p mv (5-22) v and have the same direction, the SI unit for momentum is kilogram-meter per second ( kg m / s ) . Express Newton’s Second Law of Motion in terms of momentum: The time rate of change of the momentum of particle is equal to the net force acting on the particle and is in the direction of that force. Fnet Substituting for p dp dt (5-23) from Eq.5-22 gives dp d dv Fnet (mv ) m ma dt dt dt Equivalent expressions 5-5 The Linear Momentum of a System of Particles Now consider a system of n particles. The system as a whole has a total linear momentum p , which is defined to be the vector sum of the individual particles’ linear momenta. p p1 p2 p3 pn (5-24) m1v1 m2v2 m3v3 mn v n Compare it with Eq.5-17, we see the linear momentum of the system Mvcom m1v1 m2v2 m3v3 mnvn (5-17) p Mvcom (linear momentum, system of particles) (5-25) The equation above gives us another way to define the linear momentum of a system of particles: The linear momentum of a system of particles is equal to the product of the total mass M of the system and the velocity of the center of mass. 5-5 The Linear Momentum of a System of Particles Take the time derivative of Eq.5-25, we find dvcom dp M Macom dt dt (5-26) Comparing Eq.5-14 and 5-26 allows us to write Newton’s second law for a system of particles in the equivalent form Fnet Macom Fnet dp dt (Newton’s Second Law ) (5-14) (system of particles) (5-27) 5-6 Collision and Impulse ★ In everyday language, a collision occurs when an objects crash into each other. Example: tennis ball contacts with racket the collision ofa ball with a bat ★ A collision is an isolated event in which two or more bodies (the colliding bodies) exert relatively strong forces on each other for a relatively short time. definition 5-6 Collision and Impulse ★ Single collision L R During a head-on collision: A third law force pair F (t ) , F (t ) F (t ) x F (t ) The change of the linear momentum depends on: The forces and the action time t Apply Newton’s second law F dP dt to ball R dP F (t )dt Integrating Eq. 5-28 from ti Pf Pi tf dP F (t )dt ti (5-28) to t f : (5-29) 5-6 Collision and Impulse Pf Pi tf dP F (t )dt (5-29) L ti J tf F (t ) dt (5-30) ti F (t ) R x F (t ) ★ J is the impulse, which is a measure of both the magnitude and the duration of the collision force. tf J F (t )dt ti F J Favg t F (5-35) F (t ) J ti rectangle Favg t tf t J ti t tf t 5-6 Collision and Impulse Pf Pi tf dP F (t )dt (5-29) L ti J tf ti F (t ) dt (5-30) F (t ) R F (t ) From Eqs. 5-29 and 5-30 P Pf Pi J (5-31) (5-32) ( linear momentum-Impulse theorem ) The change in an object’s momentum is equal to the impulse on the object. Component form Px J x tf Pfx Pix Fx dt J x ti (5-33) (5-34) x 5-6 Collision and Impulse Series of collisions m A steady stream of identical projectiles collides with a fixed target. Find the average v Favg Target Projectiles force Favg on the target during the bombardment. The total change in momentum for n projectiles in t is : np The impulse J on the target in t : J np (5-36) Combining Eq. 5-35 Favg J Favg t and 5-36: J n n p mv t t t (5-37) x 5-6 Collision and Impulse Series of collisions The rate at which the projectiles collide with the target v Favg Target Projectiles J n n (5-37) Favg p mv t t t In t , an amount of mass m nm collide with the target, so The rate at which the mass m (5-40) Favg v collides with the target t m v If vi v, v f 0 v 0 v v Favg t m v If vi v, v f v v v v 2v Favg 2 t x 5-7 Conservation of Linear Momentum Suppose that the net external force acting on a system of particles is zero (isolated), and that no particles leave or enter the system(closed),Then F 0 dp 0 dt p =constant net (closed,isolated system) (5-42) If no net external force acts on a system of particles, the total linear momentum p of the system cannot change. Law of conservation of linear momentum Eq.5-42 can also be written as pi p f (closed,isolated system) (5-43) For a closed, isolated system total linear momentum at some initial time ti = total linear momentum at some later time t f 5-7 Conservation of Linear Momentum If the component of the net external force on a closed system is zero along an axis then the component of the linear momentum of the system along that axis cannot change. 5-8 Momentum and Kinetic Energy in Collisions Discussion collisions in closed (no mass enters or leaves them) and isolated (no net external forces act on the bodies within them ) systems. Kinatic Energy(in collisions) 1. Elastic collision: is a special type of collision in which the kinetic energe of the system of colliding bodies is conserved. 2. Inelastic collision: after the collision the kinetic energe of the system is not conserved. 3. Completely inelastic collision: after the collision the bodies stick together and have the same final velocity ( the greatest loss of kinetic energe ). 5-8 Momentum and Kinetic Energy in Collisions Linear Momentum(in collisions) Regardless of the details of the impulses in a collision; Regardless of what happens to the kinetic energy of the system, The total linear momentum P of a closed, isolated systems cannot change. (no external force !) The law of conservation of linear momentum In a closed , isolated system containing a collision, the linear momentum of each colliding body may change but the total linear momentum P of the system cannot change, whether the collision is elastic or inelastic. 5-9 Inelastic Collisions in One Dimension One Dimensional Inelastic collision Two colliding bodies form a closed , isolated system along the x axis. v2i v1i befor x v1 f v2 f after x m1 m2 The law of conservation of linear momentum Pi Pf P1i P2i P1 f P2 f (5-50) before、 after collision The motion is one-dimensional, component form: m1v1i m2 v2i m1v1 f m2 v2 f (5-51) 5-9 Inelastic Collisions in One Dimension One-Dimensional Completely Inelastic Collision Before the collision body 2 is at rest, body 1 moves directly toward it. After the collision, the stuck-together bodies move with the same velocity V . v1i befor Projectile m1 after collision v2i 0 Target m2 V m1 m2 The law of conservation of linear momentum Pix Pfx m1v1i (m1 m2 )V (5-52) before、 after collision m1 V v1i m1 m2 (5-53) x x 5-9 Inelastic Collisions in One Dimension Velocity of Center of Mass In a closed, isolated system, the velosity vcom of the center of mass of the system cannot be changed by a collision for there is no net external force to change it. Find out vcom m1 (left side=constant) p1i p2i P vcom m1 m2 m1 m2 (constant) v2i 0 Collision ! P Mvcom (m1 m2 )vcom P p1i p2i m2 v1i vcom x m1 m2 V vcom (5-54) (5-55) (5-56) Completely inelastic collision 5-10 Elastic Collisions In One Dimension We can approximate some of the everyday collisions as being elastic; we can approximate that the total kinetic energy of the cilliding bodies is conserved. Total kinetic energy before the collision ☞ = v1i befor Projectile after m1 v2i 0 Target m2 v1 f m1 v2 f m2 Total kinetic energy after the collision In an elastic collision, the kinetic energy of each colliding body may change, but the total kinetic energy of the system does not change. x x 5-10 Elastic Collisions In One Dimension v1i Stationary Target Before the collision body 2 is at rest, body 1 moves toward it (head on collision). befor Projectile after m1 v2i 0 Target m2 v1 f v2 f m2 m1 Assume this two body system is closed and Isolated. Then the net linear momentum of the system is conserved. m1v1i m1v1 f m2 v2 f ( linear momentum ) (5-63) If the collision is also elastic, the total kinetic ☞energy of the system is also conserved. 1 2 mv mv m v 2 1 1i 1 2 2 1 1f 1 2 2 2 2f ( kinetic energy ) (5-64) x x 5-10 Elastic Collisions In One Dimension Stationary Target m1v1i m1v1 f m2 v2 f 1 2 mv mv m v 2 1 1i 1 2 2 1 1f 1 2 2 2 2f ( linear momentum ) (5-63) ( kinetic energy ) (5-64) If know m1、m2、v1i , Then can find out v1 f 、v2 f Rewrite Eq.5-63 m (v v ) m v (5-65) 1 1i 1f 2 2f Rewrite Eq.5-64 m1 (v1i v1 f )(v1i v1 f ) m v 2 2 2f v1 f m1 m2 v1i m1 m2 v2 f 2m1 v1i m1 m2 (5-66) (5-67) (5-68) 5-10 Elastic Collisions In One Dimension Stationary Target v1 f m1 m2 v1i m1 m2 v2 f (5-67) 2m1 v1i(5-68) m1 m2 Discussion: A few special situations m1 m2 , Eqs. (5-67) and (5-68) v2 f v1i Changing vilocities ! reduce to v1 f 0 and 2. A massive target: If m2 m1 , Eqs. (5-67) and (5-68) 1. Equal masses: If reduce to v1 f v1i and bounds back 3. A massive projectile: If reduce to v1 f v1i m1 and v2 f v 2 m1 m2 1i (5-69) m2 ,Eqs. (5-67) and (5-68) v2 f 2v1i (5-70) 5-10 Elastic Collisions In One Dimension 1.Conservation of the linear momentum m1v1i m2 v2i m1v1 f m2 v2 f Moving Target v1i 2.Conservation of the kinetic energy 1 2 mv m v mv m v 2 1 1i 1 2 2 2 2i 1 2 2 1 1f 1 2 2 2 2f m1 v2i m2 x head on elastic collision To work out v1 f and v2 f , rewrite these conservation equations: m1 (v1i v1 f ) m2 (v2i v2 f ) (5-73) (5-74) m1 (v1i v1 f )(v1i v1 f ) m2 (v2i v2 f )(v2i v2 f ) m1 m2 2m2 v1 f v1i v2i (5-75) m1 m2 m1 m2 2m1 m2 m1 v2 f v1i v2i (5-76) m1 m2 m1 m2 5-11 Collisions in Two Dimensions Two dimension (not head-on) elastic collision System: closed + isolated Conservation equations: P1i P2i P1 f P2 f glancing collision (5-77) y v2 f m2 2 m1 v1i x 1 v1 f K1i K 2i K1 f K 2 f (5-78) Rewrite Eq.5-77 for components along the x、y axis m1v1i m1v1 f cos 1 m2v2 f cos 2 (x axis) (5-79) 0 m1v1 f sin 1 m2 v2 f sin 2 (y axis) (5-80) 1 2 mv mv m v 2 1 1i 1 2 2 1 1f 1 2 2 2 2f (5-81) 5-12 Systems with Varying Mass: A Rocket Now let us study a special system: a rocket 5-12 Systems with Varying Mass: A Rocket Most of the mass of a rocket on its launching pad is fuel, all of which will eventually be burned and ejected from the nozzle of the rocket engine Consider the rocket and its ejected combustion products as a system, the total mass is still constant. China´s manned spacecraft Shenzhou-7 blasts off 5-12 Systems with Varying Mass: A Rocket Finding the Acceleration t M v Watching in a inertial reference frame; In deep space, no gra(a) t dt vitional or atmospheric drag M dM dM forces At an arbitrary time t: p Mv x v dv U x (b) dt later p dMU ( M dM )(v dv ) An time interval For a closed 、isolated system, the linear momentum must be conserved. Pi Pf (5-82) Mv dMU ( M dM )(v dv) (5-83) 5-12 Systems with Varying Mass: A Rocket t dt inertial Earth reference frame dM M dM vrel v dv U x Eq.5-83 can be simplified by using the relative speed velocity of rocket velocity of rocket relative to frame = relative to products absolute velocity relative velocity + velocity of products relative to frame convected velocity vabs vrel vcon For the onedimensional motion (v dv) vrel U U v dv vrel (5-84) 5-12 Systems with Varying Mass: A Rocket U v dv vrel Substituting it into yields: dM Replace dt comsuption Mv dMU (M dM )(v dv) dMvrel Mdv (5-85) dM dv vrel M dt dt (5-86) by R , where Rvrel Ma Rvrel (5-84) R (5-83) is the mass rate of fuel (first rocket equation) the thrust of the rocket engine (5-87) T Ma 5-12 Systems with Varying Mass: A Rocket Finding the Velocity Now, let us study how the velocity of a rocket changes as it consums its fuel. From dMv Mdv (5-85) rel dM dv vrel M Integrating leads to vf vi dv vrel Mi v f vi vrel ln Mf Mf Mi dM M (second rocket equation) (5-88) The advantage of multistage rockets !