LOW NOISE AMPLIFIER FOR AN ELECTRO-CARDIOGRAM
INTEGRATED CIRCUIT ANALOG FRONT END
A Project
Presented to the faculty of the Department of Electrical and Electronic Engineering
California State University, Sacramento
Submitted in partial satisfaction of
the requirements for the degree of
MASTER OF SCIENCE
in
Electrical and Electronic Engineering
by
Dhruval Patel
SUMMER
2013
© 2013
Dhruval Patel
ALL RIGHTS RESERVED
ii
LOW NOISE AMPLIFIER FOR AN ELECTRO-CARDIOGRAM
INTEGRATED CIRCUIT ANALOG FRONT END
A Project
by
Dhruval Patel
Approved by:
______________________________, Committee Chair
Perry L. Heedley, Ph.D.
__________________________________, Second Reader
Thomas W. Matthews, Ph.D.
Date
iii
Student: Dhruval Patel
I certify that this student has met the requirements for format contained in the University
format manual, and that this project is suitable for shelving in the Library and credit is to
be awarded for the project.
, Graduate Coordinator
Preetham B. Kumar, Ph.D.
Date
Department of Electrical and Electronic Engineering
iv
Abstract
of
LOW NOISE AMPLIFIER FOR AN ELECTRO-CARDIOGRAM
INTEGRATED CIRCUIT ANALOG FRONT END
by
Dhruval Patel
An electrocardiogram is a measurement of the signal due to the electrical activity
of the heart. This signal contains a great deal of useful diagnostic information. This
project explores the needs of key circuit blocks in an integrated circuit analog front end
for electro-cardiogram applications. Specifically, it is concerned with the design of the
low noise amplifier and includes a brief explanation of the circuit, trade-offs that should
be considered, and key decisions that must be made to meet critical specifications.
Simulations of a proposed circuit design were performed to compare the
performance achieved with a given set of specifications using worst-case variations for
process, supply voltage and temperature. A summary shows the final values achieved for
all specifications, and conclusions and recommendations are discussed.
, Committee Chair
Perry L. Heedley, Ph.D.
Date
v
TABLE OF CONTENTS
Page
List of Tables .................................................................................................................... vii
List of Figures .................................................................................................................. viii
Chapter
1. INTRODUCTION .........................................................................................................1
1.1
1.2
Background ......................................................................................................1
1.1.1
Signal Characteristics ...........................................................................1
1.1.2
Types of ECG Systems.........................................................................3
1.1.3
Analog Front End (AFE) ......................................................................3
Analog Front End .............................................................................................4
1.2.1
Low Noise Amplifier (LNA) ................................................................5
1.2.2
High Pass Filter (HPF), and Low Pass Filter (LPF) .............................5
1.2.3
Variable Gain Amplifier (VGA) ..........................................................6
1.2.4
Successive Approximation Analog to Digital Converter
(SAR-ADC) ..........................................................................................6
2. DESIGN OF THE LOW NOISE AMPLIFIER .............................................................8
2.1
Circuit Description ..........................................................................................8
3. SIMULATION OF THE LOW NOISE AMPLIFIER .................................................14
3.1
Waveforms .....................................................................................................14
3.2
Results ............................................................................................................19
4. CONCLUSIONS AND RECOMMENDATIONS ......................................................20
References ..........................................................................................................................21
vi
LIST OF TABLES
Tables
1.
Page
Table 3.1 Simulation Results .................................................................................19
vii
LIST OF FIGURES
Figures
Page
1.
Figure 1.1. Example Cardiogram .............................................................................2
2.
Figure 1.2 Block Diagram for the AFE ...................................................................4
3.
Figure 2.1 Low Noise Amplifier Circuit................................................................10
4.
Figure 2.2 Common Mode Feedback Circuit ........................................................11
5.
Figure 3.1 Closed loop transient response for a sine wave input...........................15
6.
Figure 3.2 Closed loop AC response .....................................................................16
7.
Figure 3.3 Open loop AC response ........................................................................17
8.
Figure 3.4 FFT Analysis ........................................................................................18
viii
1
Chapter 1
INTRODUCTION
1.1 Background
The use of integrated circuits for biomedical applications is increasing. One
important application is the measurement of the electrocardiogram (ECG), which is a
signal due to the electrical activity of the heart. Such use of integrated circuitry can result
in increased precision as well as making the measurement process easier. This report
presents an integrated low-noise analog front end for ECS measurements.
1.1.1
Signal Characteristics
The first step in learning the requirements for any biomedical instrument is to
learn about the signal to be sensed. The subject of this report is an amplifier for the ECG
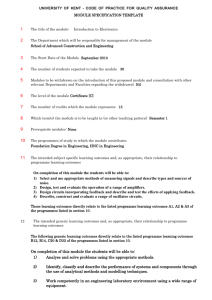
signal. An example of an ECG signal is shown in Figure 1.1. There are many important
aspects to the actual signal, as can be seen in the figure. To differentiate them, each
interval is named specifically by the medical community using two or more letters to
identify each interval, such as the PR Interval, QRS Complex, QT Interval, etc. Each part
of the signal provides different information about the condition of the heart.
2
Figure 1.1. Example Cardiogram [8]
The peaks of the QRS complex are different for each individual. Depending on
the measurement conditions the value of this peak varies between +/- 1 mV to +/- 20 mV,
which is relatively small compared to the signals in most electronic devices today.
Therefore, designing a circuit to measure such small signals presents a unique set of
challenges.
3
1.1.2
Types of ECG Systems
Currently, two kinds of ECG systems are available; one is for the consumer, and
the other is for health care professionals. The first one is used for measuring the number
of heartbeats in a minute called BPM, or beats per minute. This type of instrument is
only concerned with the QRS complex (see Figure 1.1) rather than details for the other
intervals. The second instrument is used by health care professionals to obtain high
resolution waveforms, which can be used to precisely measure every detail of the ECG
signal even for the smallest parts of the signal. Such precision is required when a doctor
wants to check the condition of a patient’s heart, not just the BPM. The task for this
project was to design for the first type of ECG, so less stringent specifications were
required for the circuits used.
1.1.3
Analog Front End (AFE)
Real world signals are analog in nature, meaning that they are continuous in both
time and value with an infinite number of possible values. If we want to analyze a signal
on a digital device, we have to limit the number of samples of the waveform we use since
we cannot represent an infinite number of values in any digital system. For that, we must
convert the analog signal to a digital representation before we can input the signal to a
digital instrument. This requires an analog-to-digital converter (ADC), as well as several
additional gain and filtering functions which condition the signal before it is converted to
digital form. For the BPM application, five circuit blocks are required to properly
4
condition the signal. Together these circuits are called the “analog front end” or AFE.
The functions provided by each block in the AFE are explained in the following section.
1.2 Analog Front End
Low
Noise
Amplifier
High
Pass
Filter
Variable
Gain
Amplifier
Low
Pass
Filter
Successive
Approximation
ADC
Figure 1.2 Block Diagram for the AFE
The Analog Front End (AFE) of an ECG is made up of five major blocks, as
shown in Figure 1.2. As a whole, we want a digital representation of the analog ECG
signal at the output. A brief explanation of each block is included in the following to
assist with understanding its contribution to the overall system.
5
1.2.1
Low Noise Amplifier (LNA)
Before we can understand the significance of the low noise amplifier, it is
worthwhile to ask a question: Why is it that we cannot use a standard operational
amplifier at the input of an ECG system? As we know, the input signal is very small, so
any noise becomes significant. So while a simple operational amplifier could be used to
amplify the input it would add too much noise to the signal. To reduce the amount of
noise added by the amplifier while maintaining enough gain requires a special kind of
amplifier, a low noise amplifier. So, the purpose of a LNA in an ECG system is to
amplify the input signal while adding an insignificant amount of noise to the system. In
addition, the LNA used for ECG applications must have an extremely high CMRR
(common-mode rejection ratio), on the order of 100dB or higher. This is necessary to
reject the 60Hz interference which is typically picked up by the wires used to connect the
instrument to the patient.
1.2.2 High Pass Filter (HPF), and Low Pass Filter (LPF)
In general, filters are used to remove unwanted signal frequencies. This ensures
inclusion of only the frequency range of interest. Limiting the bandwidth used also has
the desirable effect of minimizing the amount of noise added to the signal.
For the ECG signal, the frequency range is 0.1Hz to 200Hz. As the name
suggests, a high pass filter passes higher frequencies, so in this application a high pass
filter is used to remove frequencies below 0.1Hz. In addition, a low pass filter is used to
6
remove frequencies greater than 200Hz. As a result, the signal input to the ADC is
limited to the range of 0.1Hz to 200 Hz.
1.2.3 Variable Gain Amplifier (VGA)
As mentioned before, the amplitude of the heartbeat signal detected varies greatly
depending on the measurement conditions. So the question becomes, how do we amplify
that signal to fill the full scale input of an analog to digital converter (ADC), without
clipping the signal by amplifying it too much? The answer is a variable gain amplifier
(VGA). This amplifier provides a set of closed loop gains, and the needed amount of
gain is selected depending on the current signal strength. Typical gains provided range
from 2 to 20. This allows the input signal to the ADC to have nearly the same amplitude
each time. For example, if the input to the VGA is 100 mV in one case, and a gain of 4 is
selected, then the output of VGA will be 400 mV. In another case, if the input is 25 mV,
and a gain of 16 is selected, the output will again be 400 mV. Therefore even though we
have different input signals, we can apply the same input amplitude to the ADC.
1.2.4 Successive Approximation Analog to Digital Converter (SAR-ADC)
All signals in the real world are analog, and vary continuously in both time and
amplitude with an infinite number of possible values. However, most of the time digital
systems are used for data analysis, for example to analyze ECG data by inputting the data
into a computer or other digital analysis system. This leads to the need for an electronic
circuit that will convert the analog signal at the input to a digital representation. That
kind of circuit is called an analog to digital converter (ADC). For ECG applications
7
Successive Approximation ADCs are often used since they provide enough speed and
resolution while using only small amounts of power and area on the integrated circuit.
8
Chapter 2
DESIGN OF THE LOW NOISE AMPLIFIER
2.1 Circuit Description
This section will describe the operation of the low noise amplifier selected for this
design, which is shown in Figure 2.1 [12]. The common-mode feedback circuit used
with this amplifier is shown in Figure 2.2. Closed loop gain is one of the key parameters
for any amplifier. This is usually set by a ratio of resistors in feedback around an
amplifier.
However, in this circuit the feedback resistors are included inside the
amplifier. Notice the two components RS and RF in Figure 2.1. These resistors act as
the input and feedback resistors, respectively. The ratio of the values of RF to RS defines
the closed loop gain, which is 48000/2400 = 20 in this case. The equation for the
AOL
resultant closed loop gain is ACL= 1+AOL/ACLR , where ACL is the closed loop gain,
AOL is the open loop gain, and ACLR is the resistor ratio. From this equation we can
see that, the higher the open loop gain, the closer the closed loop gain will be to the
resistor ratio. Simulation results for both the open loop and closed loop gains are shown
in Chapter 3.
As shown in Figure 2.1, there are four transistors stacked in each input leg. M1
and M4 form the differential pair where the input signal is applied, while M2 and M5
form a second differential pair where feedback from the output is applied. Stacking these
two differential pairs provides a very high CMRR. They are based by the tail current
sources provided by M3 and M6. The diode connected transistors M7 and M8 act as the
9
load devices for the first stage, and are also the inputs to the current mirrors formed by
M8, M9 and M7, M10. The overall typology forms a current mirror amplifier. To keep
the input transistors in saturation, we need a higher common mode input voltage, which is
achieved by adding the source follower transistors, M13 and M16, before the input
differential pair. The bias current in the two input legs was chosen to be high enough so
even after signal current is steered through the resistors, enough bias current is left to
keep the two differential pairs (M1, M4 and M2, M5) turned on and operating in
saturation.
Figure 2.1 Low Noise Amplifier Circuit.
10
11
Figure 2.2 Common Mode Feedback Circuit.
High common mode rejection ratio (CMRR) is also a key specification for this
application. The equation for this is CMRR=
|ADM|
|ACM|
, where ADM is the differential gain,
and ACM is the common mode gain. From this equation we can see that to get a high
CMRR, we either need a high differential gain, or a low common mode gain, or both.
The usual way to achieve a low common mode gain is to use a tail current source with
high output resistance to bias the input differential pair. For this circuit, the second
differential pair (M2, M5) used for feedback acts as cascade devices for the tail current
sources (M3, M6). So, this circuit has a much higher CMRR compared to one without a
cascoded tail current source. In addition, long channel lengths were chosen for these
12
devices to help increase the resistance of the tail current source, and thus the CMRR.
Together, this allowed a CMRR of nearly 100dB to be achieved, as shown in Table 3.1.
Meeting the noise specification was the most challenging part of this LNA design.
Since this circuit is used for a low frequency (0.1 Hz to 200 Hz) application, the
dominant part of the noise is from 1/frequency noise in the MOSFETs. As the name
suggests, noise is inversely proportional to frequency, so the lower the frequency, the
greater the noise.
Another type of noise, called white noise, which is directly
proportional to resistance and frequency must also be considered.
However the
contribution from white noise was not significant due to the low bandwidth used in this
application of only 199.9 Hz (200 Hz – 0.1 Hz). However, choosing resistance values
represents a trade off. Clearly, reducing the value of RS and RF while maintaining the
desired ratio of 20 to 1 would reduce the noise contributed by these resistors. But
reducing the value of these resistors would also reduce the Gm*RS of the devices in the
differential pairs, which would lower the accuracy of the closed loop gain.
Also,
reducing these resistor values too much would cause difficulties in the layout for
resistance matching. So there is a trade off. Since the noise contributed by these resistors
was not significant compared to the 1/f noise contributed by the MOSFETs, the values
chosen here were acceptable.
Stability is another key factor for a negative feedback circuit. Since this circuit is
basically a current mirror amplifier, it has the dominant pole at the output, and the second
pole at the gates of the diode connected FETs, M7 and M8. The dominant pole sets the
unity gain frequency, while the second pole limits how high the unity gain frequency can
13
be while still achieving a reasonable phase margin. For this application, high bandwidth
is not a requirement, but achieving enough phase margin for good stability is. This is
limited by the second pole frequency. Notice that the current mirror ratio used in this
design is only ¼ between M7, M10 and M8, M9. Usually a current mirror ratio greater
than one is used to increase the open loop gain. Here, to achieve a good phase margin,
the second pole frequency had to be increased. To make that happen, the capacitance at
the gates of M7 and M8 needed to decrease. So to achieve a good phase margin while
not increasing noise, the current mirror ratio was chosen to be less than one. Stability
results are shown in Chapter 3.
14
Chapter 3
SIMULATION OF THE LOW NOISE AMPLIFIER
All simulations shown here were run with a worst-case process variations, high
temperature and low supply voltages.
3.1 Waveforms
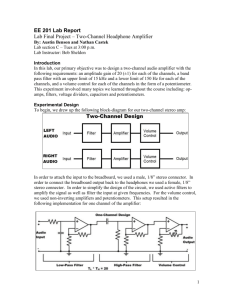
Figure 3.1 shows the results of a transient simulation with an input sine wave,
which was used to determine the closed loop response. Figure 3.2 shows the closed loop
AC response. Figure 3.3 shows the open loop AC response which achieved an open loop
gain of 40.86 dB and a phase margin of 70.91 degrees. Figure 3.4 shows the results from
an FFT analysis, which achieved an ENOB (Effective Number Of Bits) of slightly over 9
bits which is sufficient for this application. An AC simulation of the noise performance
was also performed to determine the input referred noise. The result was 5.86uV/sqrt Hz,
as shown in Table 3.1
.
350.0M
V(VIDM)
V(VODM)
300.0M
250.0M
200.0M
Peak
Peak: 596.74
: 596.74
PeakTo
To Peak
MVMV
150.0M
100.0M
Voltage (V)
50.0M
Peak
To Peak : 40 MV
Peak To Peak : 40.000 MV
0.0M
-50.0M
-100.0M
-150.0M
-200.0M
-250.0M
-300.0M
-350.0M
0.0M
0.2M
0.4M
0.6M
0.8M
1.0M
1.2M
1.4M
1.6M
1.8M
2.0M
Time (s)
Figure 3.1 Closed loop transient response for a sine wave input.
15
30.0
db(VODM)
23.49486
23.4948
6
20.0
10.0
0.0
Magnitude (dB)
-10.0
-20.0
-30.0
-40.0
-50.0
-60.0
20.0
cphase(VODM)
-0.00207
0.0
-20.0
-40.0
-60.0
-80.0
Phase (degrees)
-100.0
-120.0
-140.0
-160.0
-180.0
-200.0
-220.0
-240.0
-260.0
1.0e-1
2
3
C1:
3.65041e-1
C1:
4 53.56041e-1
6
1.0e+0
2
3
4
5 6
1.0e+1
2
3
4
5 6
1.0e+2
2
3
4
5 6
1.0e+3
2
3
4
5 6
1.0e+4
2
3
4
5 6
1.0e+5
2
3
4 5 6
1.0e+6
2
3
4
5 6
1.0e+7
Frequency (Hz)
Figure 3.2 Closed loop AC response.
16
50.0
db(VODM)
40.85523
40.85523
40.0
30.0
20.0
10.0
0.00006
0.00006
Magnitude (dB)
0.0
-10.0
-20.0
-30.0
-40.0
-50.0
-60.0
20.0
cphase(VODM)
-0.01506
0.0
-20.0
-40.0
-60.0
-80.0
-109.09001
-109.09001
Phase (degrees)
-100.0
-120.0
-140.0
-160.0
-180.0
-200.0
-220.0
-240.0
-260.0
1.0e-1
2
3
C1:
4 53.56041e-1
6
1.0e+0
2
3
4
5 6
1.0e+1
2
3
4 5 6
1.0e+2
2
3
4
5 6
1.0e+3
2
3
4
5 6
1.0e+4
2
3
4
5 6
Frequency (Hz)
1.0e+5
2
3
4 5 6
1.0e+6
2
3
4
5 6
1.0e+7
C2:
1.45478e+5
= 1.45478e +2K)
C2: 1.45478e+5
(dx =(dx
1.45478e+2K)
Figure 3.3 Open loop response.
17
Figure 3.3 Open loop AC response.
17
18
Figure 3.4 FFT Analysis
19
3.2 Results
Table 3.1 Simulation Results
Specification
Achieved
Unit
Closed loop gain (ACL)
23.49
dB
Open loop gain (AOL)
40.86
dB
Phase margin (PM)
70.91
Degrees
Unity gain bandwidth (UGBW)
145.48
kHz
Common mode rejection ratio (CMRR)
97.94
dB
Input referred noise at 0.1 Hz (Vrms)
5.86
uV/sqrt Hz
Signal to noise ratio (SNR)
58.07
dB
Signal to distortion ratio (SDR)
62.56
dB
Signal to noise + distortion ratio (SNDR)
56.75
dB
20
Chapter 4
CONCLUSIONS AND RECOMMENDATIONS
In conclusion, the requirements for a low noise amplifier in an ECG analog front
end are very specific – achieve low noise, sufficient closed loop gain, and high common
mode rejection.
High bandwidth is not a key requirement in this design, and low
distortion is not difficult to achieve given the low output swing that is needed. Based on
the results discussed here, this design could be used as part of an analog front end for an
electro-cardiogram.
However, the low noise amplifier design shown in this project uses four
transistors stacked between the power supplies, so it requires a supply voltage of at least
3V to 5V to keep all four transistors in saturation. If a low noise amplifier in a recent
technology which uses a low supply voltage is needed, the use of other circuit topologies
should be considered.
21
REFERENCES
[1] Texas Instruments. [2012], “Low-power, 8-channel, 24-bit analog front-end for
biopotential measurements”, [Online]. Available: ADS1298/www.ti.com
[2] Enrique Company-Bosch and E. Hartmann. (n.d.). “ECG front-end design is
simplified with microconverter,” Analog Dialogue, November, 37-11. [Online].
Available: www.analog.com/analogdialogue
[3] Chinmayee Nanda et al., “1 V CMOS instrumentation, amplifier with high DC
electrode offset cancellation for ECG acquisition system,” Proceedings of the
Students’ Technology Symposium, 2010 IEEE, Kharagpur, India 2010, pp. 21-25.
[4] Robert Rieger. “Variable-gain, low noise amplification for sampling front end,” IEEE
Trans. Biomed. Eng., vol. 5, no. 3, pp. 253-261, Jun. 2011.
[5] James McKee et al., “Sigma-Delta analog-to-digital converters for ECG signal
acquisition,” 18th Annual International Conference of the IEEE Engineering in
Medicine and Biology Society, Amsterdam, Netherlands, 1996, pp. 19-20.
[6] Maximintegrated.com. [2010]. "Introduction to electrocardiographs”. [Online].
Available: http://www.maximintegrated.com/app-notes/index.mvp/id/4693
[7] Mentor Graphics. [2009]. Questa ADMS: analog-digital mixed-signal simulator
datasheet. [Online]. Available: www.mentor.com
[8] Were you wondering. [2009]. What does your heart do? [Online]. Available:
http://www.wereyouwondering.com/what-does-your-heart-do/
[9] Perry L. Heedley, EEE235 Lab documents, unpublished.
[10] Perry L. Heedley, EEE230 Class Notes, unpublished.
[11] Perry L. Heedley, EEE232 FFT Matlab Code, unpublished.
[12] Willy M. C. Sansen and Michel S. J. et al., “A micropower low-noise monolithic
instrumentation amplifier for medical purposes”, IEEE Journal of Solid-State
Circuits, vol. SC-22, no. 6, pp. 1163-1168, Dec. 1987.
[13] Chinmayee Nanda et al., “A CMOS instrumentation amplifier with low voltage and
low noise for portable ECG monitoring systems”. 2008 ICSE Proceedings, Johor
Bahru, Malaysia, pp. 54-58, 2008.
22
[14] Analog Devices, [2009], “Instrumentation amplifier (in-amp) basics,” pp. 1-5.
[15] Chia-Hao Hsu et al., “A high performance current-balancing instrumentation
amplifier for ECG monitoring systems”, ISOCC, 2009, pp. 83-86.
[16] Jack Li, “Thermal noise analysis in ECG applications,” Texas Instruments, 2011,
pp. 1-6.
[17] Texas Instruments, “Diagnostic, patient monitoring and therapy applications guide,”
2010, pp. 1-71.
[18] Venkatesh Acharya. “Improving common-mode rejection using the right-leg drive
amplifier,” Texas Instruments, 2011, pp. 1-11.