Problem Solving
advertisement

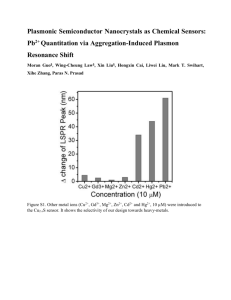
Problem Solving by Searching Chapter 3 Spring 2004 Copyright, 1996 © Dale Carnegie & Associates, Inc. Problem-Solving Agents This is a kind of goal-based agents that decide what to do by finding sequences of actions that lead to desirable states. Formulating problems Example problems Searching for solutions CS 471/598 by H. Liu 2 A simple problem-solving agent Goal formulation - limiting the objectives A goal is a set of world states in which the goal is satisfied. Problem formulation - deciding what actions and states to consider Search - looking for the best sequence of actions CS 471/598 by H. Liu 3 A simple agent Solutions - the results of search, so they are sequences of actions that lead to the goal Execution - acting upon the world Formulate -> Search -> Execute An algorithm in Fig 3.1 CS 471/598 by H. Liu 4 Well-defined problems and solutions A problem is defined by four components Initial state is where an agent starts Possible actions, successor function <action,successor> Goal test determines if a state is a goal state Path cost function, step cost A solution is a path from the initial state to a goal state Path - connecting sets of states CS 471/598 by H. Liu 5 Problems and Solutions States and actions are the basic elements of a problem A world of states: initial state I, operator O (or successor) State space - the set of all states reachable from I by any sequences of O Example: a simplified Romania road map (Fig 3.2) CS 471/598 by H. Liu 6 Formulating Problems Choosing states and actions The real art of problem solving is in what goes into the description of the states and operators and what does not Abstraction - removing detail from a representation CS 471/598 by H. Liu 7 Measuring problem-solving performance Performance measures Completeness Optimality Time complexity Space complexity Reach the goal Search cost Total cost = path cost + search cost CS 471/598 by H. Liu 8 Example Problems Toy problems: concise and exact, used to illustrate or exercise various problemsolving methods - ideal cases Real-world problems: more difficult and we want solutions, but there might be many different descriptions CS 471/598 by H. Liu 9 Toy problem (1) Vacuum world (Fig 3.3) States: 8 Initial states: any Successor function: Left, Right, Suck Goal test: Clean or not Path cost: Each step costs 1 Comparing with the real world case CS 471/598 by H. Liu 10 Toy problem (2) The 8-puzzle States:O(9!) Initial state: Start state (Fig 3.4) Successor function: Left, Right, Up, Down Goal test: Goal state (Fig 3.4) Path cost: Each step costs 1 CS 471/598 by H. Liu 11 Toy problem (3) The 8-queens (Fig 3.5) States: 64*63*…*57 Initial states: Empty board Successor function: Add a queen to any empty square Goal test: 8 queens on the board, none attacked Path cost: N/A CS 471/598 by H. Liu 12 Real-world problems Route finding Touring and traveling salesperson problem VLSI layout Robot navigation Assembly sequencing Protein design Internet searching CS 471/598 by H. Liu 13 Search Generating action sequences Expanding the current state by ... Generating a new set of states Let’s look at a situation we come to BY … PHX -> ASU -> BY A state map CS 471/598 by H. Liu 14 What is search? The essence of search is to consider one choice at a time. Search tree – generated by the initial state and successor, defines the state space (two examples - Figs 3.6 and 3.8) root, nodes, fringe (leaf nodes) A general search algorithm (Fig 3.9) Initial state, test, expand, test, expand, … How to expand is determined by a search strategy How to implement the fringe - a queue CS 471/598 by H. Liu 15 Search Evaluation Evaluating search strategies (Criteria) Completeness – guaranteed to find a solution if there is one Time complexity – big O Space complexity – big O Optimality – the solution is optimal Two types of search Blind search (uninformed) Heuristic search (informed) CS 471/598 by H. Liu 16 Uninformed Search Strategies Breadth-first search (a binary tree example) Expanding the shallowest node Complete? Optimal? What if cost is non-decreasing How to implement it branching factor - a killing cost (Fig 3.11) The main concerns the memory requirements exponential complexity Uniform cost search – expands the node with the lowest path cost When is it identical to BFS? CS 471/598 by H. Liu 17 Search Strategies (2) Depth-first search A binary tree example (Fig 3.12) Complete? Optimal? How to implement it The main concerns Wrong branch Deep branch The cures Depth-limited search (Fig 3.13) Determining depth limit based on the problem (how many cities in the map of Romania?) Iterative deepening search (Fig 3.15) CS 471/598 by H. Liu 18 Search Strategies (3) Bidirectional search The two directions: Start, Goal (Fig 3.16) What’s the saving? The main concerns How to search backwards Multiple goal states Efficient checking to avoid redundant search in the other tree CS 471/598 by H. Liu 19 Search Strategies (4) Which one to use when We need to know the strategies in terms of the four criteria Comparing uninformed search strategies (Fig 3.17) We need to know the problem to be solved CS 471/598 by H. Liu 20 Avoiding Repeated States It’s wasting time to expand states that have already been encountered and expanded before. How to avoid Systematic search Remembering what have been visited (open list vs. closed list) Graph-Search (Fig 3.19) CS 471/598 by H. Liu 21 Searching with partial information Sensorless problems Reason about sets of states instead of a single state (Fig 3.21) Contingency problems Environment is partially observable, actions are uncertain [Suck, Right, if [R,Dirty] then Suck] with position and local dirt sensors Exploration problems Both the states and actions of E are unknown Can be viewed as an extreme case of contingency problems CS 471/598 by H. Liu 22 Summary Problem solving is goal-based A problem is of 4 parts initial state, operator, goal test, path cost A single general search algorithm can solve any problem, but … Four criteria: completeness, optimality, time complexity, space complexity Various search strategies CS 471/598 by H. Liu 23