backgroundMatchingYA
advertisement

Background Estimation and Matching
for Strip82 Coadds
Yusra AlSayyad
University of Washington
DM Review
September 6, 2012
Outline
1) Overview of processing steps – Image to image matching
2) Discussion of Design Choices
- Estimation
- Median vs. Mean.
- NN2 vs. Not.
- Common Mask vs. per-Pair Mask
- Interpolation
- Detection.getBackground() {binsizes 128,256,378,512}
- Vs. Chebyshev polynomial orders {2,3,4,5}
3) Continuation of processing steps – strip to strip matching
4) Plan for next quarter
2
Very High level processing steps
1) Define any sized area of sky to coadd
2) Select a reference run per strip
3) For each field in reference run, generate a background
matched coadd
4) Stitch fields together to make coadded strips.
5) Match and stitch strips
6) Fit background to large coadd; subtract.
7) Iterate
NOTE: this process works for Stripe 82 only. Extending to LSST is a non-trivial problem.
3
Single field Coadd Processing Steps
1)
2)
3)
4)
Find Images that overlap reference run
PSF matching and warping
Photometric scaling
Background Matching
– Estimation
– Fitting spatial variation
5) Coaddition
4
Photometric Scaling
Reference Run
5
Photometric Scaling
Field 110
Field 111
Input images
warped image
6
Photometric Scaling
Field 110
Field 111
Overlap regions need to be identical
7
Scaling
Photometric Scaling
x in pixels (warped image frame)
8
Scaling
Photometric Scaling
x in pixels (warped image frame)
9
Background Matching
10
Background Estimation: Difference Image
11
How much to mask?
Sum of masks from 2 images Only. Call this “pairwise mask”
12
How much to mask?
Sum of all ~30 masks. Call this “common mask”
13
Background Estimation: Bin difference image
14
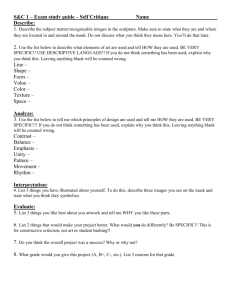
Background Estimation: counts histogram
For example: Some are nice and Gaussian. Some are not.
mean
median
Diff of medians
15
A few Background Estimation Options
For a superpixel (bin) in a difference image:
– Mean
– Median
– For N input images, find least sq. solution of all N(N-1)/2
difference images. (“NN2” Barris et al. 2009)
16
We will examine these 3 Estimate Choices Later
in presentation:
-
Estimation
- Common Mask vs. per-Pair Mask
- Median vs. Mean.
- NN2 vs. Not.
17
Background Matching: Fitting Spatial Variation
RA
– meas.algorithms.detection.getBackground(differenceImage)
– afw.math.Chebyshev1Function2D()
Dec
18
Background Matching: Fitting Spatial Variation
RA
– meas.algorithms.detection.getBackground(differenceImage)
– afw.math.Chebyshev1Function2D()
Dec
19
Examine choices
Background estimation
- Mean vs Median
- Masking: common mask vs. per-pair mask
- least squares fit of n(n-2)/2 difference images?
Spatial Variation
– How to model difference image (reference image – input
image)?
– Compare:
.detectionBinsize{512,378,256,128},
vs .backgroundOrder = {2,3,4,5}
20
1) First Qualitative Look
2) Quality Metric
– Because input images are matched to a reference run,
resulting coadds should be seamless.
– => Use RMS of overlap regions as background matching quality
metric
R.A.21
take rms of the overlap region’s unmasked pixels
For example: The difference of two overlap regions
22
Qualitative Look at Estimation: Pairwise Masks
23
Qualitative Look at Estimation: Common Mask
24
25
Metric: Estimation
26
Qualitative Look: Interpolation
RA
– meas.algorithms.detection.getBackground(differenceImage)
– afw.math.Chebyshev1Function2D()
Dec
27
Qualitative Look: Interpolation
– meas.algorithms.detection.getBackground(differenceImage)
– afw.math.Chebyshev1Function2D()
RA
Bin size comparison
Dec
28
Qualitative Look: Interpolation
RA
– meas.algorithms.detection.getBackground(differenceImage)
– afw.math.Chebyshev1Function2D()
Dec
29
Qualitative Look: Interpolation
30
Qualitative Look: Interpolation
meas.algorithms.detection.getBackground()
Bin size comparison
31
Quality Metric: Interpolation Methods
32
Strip to Strip matching
33
The Plan
1) Refactor uw background matching code to use the butler and skyMap. Merge in
features from ticket 2216. Make useable by other pipeTasks.
2) Incorporate stitching code:
a) Stitch patches (RA-wise) into strips (should just work)
b) Finish code to match and stitch N-S Strips (in the declination direction
using skyMap)
3) Validate by comparing mags, counts (to assess depth) with deeper catalogs.
4)Add enhancements:
a) Allow for coadds of any size to be generated per input specs.
b) Post-stitching background subtraction. e.g.:
i) Coadd components and stitch together.
ii) Fit a background model to this large chunk.
iii) Subtract this background model from the coadd.
iv) Use this coadd as the reference for another iteration of background
matched coadd, leaving the individual science images with a well-subtracted
background optimal for detection and measurement.
34