Variable and Value Ordering for MPE Search
advertisement

Variable and Value Ordering
for MPE Search
Sajjad Siddiqi and Jinbo Huang
Most Probable Explanation
(MPE)
N : Bayesian network
X : {X,Y,Z}
e : {X=x}
Y
X
Z
X
Y
Z
Pr(X,Y,Z)
x
y
z
0.05
x
y
z
0.3
x
y
z
0.05
x
y
z
0.1
x
y
z
0.1
x
y
z
0.2
x
y
z
0.1
x
y
z
0.1
Most Probable Explanation
(MPE)
N : Bayesian network
X : {X,Y,Z}
e : {X=x}
max
Y
X
Z
X
Y
Z
Pr(X,Y,Z)
x
y
z
0.05
x
y
z
0.3
x
y
z
0.05
x
y
z
0.1
x
y
z
0.1
x
y
z
0.2
x
y
z
0.1
x
y
z
0.1
Exact MPE by Inference
Variable Elimination
– Bucket Elimination
Exponential in the treewidth of the elimination order.
Compilation
– Decomposable Negation Normal Form (DNNF)
Exploits local structure so treewidth is not
necessarily the limiting factor.
Both methods can either run out of time or
memory
Exact MPE by Searching
X
x
y
z
0.1
Z
Y
y
z
0.2
z
0.1
Z
z
0.1
Exact MPE by Searching
Depth-First Search
– Exponential in the number of variables X.
Depth-First Branch-and-Bound Search
– Computes an upper bound on any extension
to the current assignment.
– Backtracks when upper bound >= current
solution.
– Reduces complexity of search.
Exact MPE by B-n-B Search
X
x
current solution = 0.2
y
z
0.1
Z
Y
if upper bound <= 0.2
y
z
0.2
z
0.1
Z
z
0.1
Computing Bounds: MiniBuckets
Ignores certain dependencies amongst
variables:
– New network is easier to solve.
– Solution grows only in one direction.
Splits a bucket into two or more minibuckets.
– Focuses on generating tighter bounds.
Mini-buckets is a special case of node
splitting.
Node Splitting
Y
splitting
Y
X
Z
^
Y^1
Q
(N)
R
^
X
Q
^
Y
2
^
Q
1
Z
(N`)
Y1 and Y2 are clones of Y: fully split
split variables = {Q,Y}
^
Q
2
R
Node Splitting
e: an instantiation of variables X in N.
e: a compatible assignment to their
clones in N´
^
^
e.g. if e = {Y=y}, then e = {Y1=y, Y2=y}
then
MPEp (N, e) <= MPEp (N´, e, e)
= total number of instantiations of
clone variables
Computing Bounds: Node
Splitting (Choi et. Al 2007).
Split network is easier to solve, its MPE
computes the bound.
Search performed only over the ‘split
variables’ instead of all.
Focuses on good network relaxations
trying to reduce the number of splits.
B-n-B Search for MPE
MPE(N`,{X=x})
Y
bound
^ =y, ^
MPE(N`,{X=x, Y=y, Y
Y2=y})
1
Q
bound
q
y
y
^ =y, ^
MPE(N`,{X=x, Y=y, Y
Y2=y})
1
Q
bound
^ =y, Y
^2=y,Q=q, Q
^ 1=q, Q
^ 2=q})
MPE(N`,{X=x, Y=y, Y
1
exact solution
= 4, for two split variables with binary domain
B-n-B Search for MPE
Leaves of the search tree give candidate
MPE solutions.
Elsewhere we get upper bounds to prune
the search.
A branch gets pruned if bound <= current
solution.
Choice of Variables to Split
Reduce the number of split variables.
– Heuristic based on the reduction in the size
of jointree cliques and separators.
Split enough variables to reduce the
treewidth to a certain threshold (when
the network is easy to solve).
Variable and Value Ordering
Reduce search space using an efficient
variable and value ordering.
(Choi et al. 2007) do not address this
and use a neutral heuristic.
Several heuristics are analyzed and
their powers combined to produce an
effective heuristic.
Scales up the technique.
Entropy-based Ordering
Pr(Y=y), Pr(Y=y)
Pr(Q=q), Pr(Q=q)
entropy(Y), entropy(Q)
Computation
Do the same for clones
Y
y
Q
and get average probabilities:
y
Q
Pr (Y=y) =
^ =y)+Pr(Y
^ =y)]/3
[Pr(Y=y)+Pr(Y
1
2
Entropy-based Ordering
Computation
Prefer Y over Q if
entropy(Y) < entropy(Q).
Prefer Y=y over Y=y if
Pr(Y=y) > Pr(Y=y)
Y
y
Q
y
Static and Dynamic versions.
Q
Favor those instantiations that are more likely to be MPEs.
Entropy-based Ordering
Probabilities computed using DNNF:
– Evaluation and Differentiation of AC
Experiments:
– Static heuristic, significantly faster
than the neutral.
– Dynamic heuristic, generally too
expensive to compute and slower.
Nogood Learning
g = {X=x, Y=y, Z=z} is a nogood if
MPEp (N’, g, g) <= current solution
x
y
z
Z
Y
X
current solution=1.0
bound=1.3
bound=1.2
bound=0.5
bound=1.5
let g’ = g \ {Y=y} &
MPEp (N’, g’, g’) <= current solution
then g = g’
Nogood-based Ordering
Scores:
S(X=x) = number of occurrences in nogoods
S(X) = [S(X=x) + S(X=x)]/2 (binary variables)
Dynamic Ordering:
Prefer higher scores.
Impractical: overhead of repeated bound
computation during learning.
Score-based Ordering
A more effective approach based on nogoods.
Scores of variables/values tell how can a nogood be
obtained quickly (backtrack early).
S(X=x) += 1.5-1.3=0.2 X
x
S(Y=y) += 1.3-1.2=0.1
y
S(Z=z) += 1.2-0.5=0.7 Z
z
Y
bound=1.3
bound=1.2
bound=0.5
bound=1.5
Improved Heuristic
Periodically reinitialize scores (focus on
recent past).
Use static entropy-based order as the initial
order of variables/values.
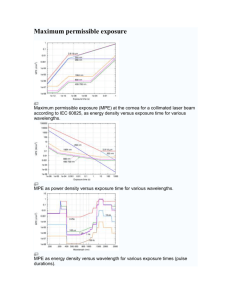
Experimental Setup
Intel Core Duo 2.4 GHz + AMD Athlon 64 X2
Dual Core Processor 4600+, both with 4 GB of
RAM running Linux.
A memory limit of 1 GB on each MPE query.
C2D DNNF compiler [Darwiche, 2004; 2005].
Trivial seed of 0 as the initial MPE solution to
start the search.
Keep splitting the network variables until
treewidth <= 10.
Comparing search spaces on grid networks
Comparing search time on grid networks
Comparing nogood learning and score-based DVO on grid network
Results on grid networks, 25 queries per network
Random networks
20 queries per network
Networks for genetic linkage analysis, which are some
of the hardest networks
Only SC-DVO succeeded
Comparison with SamIam on grid networks
Comparison with (Marinescu & Dechter, 2007) on grid networks
(SMBBF – Static mini-bucket best first)
Parameter ‘i=20’, where ‘i’ controls the size of the mini-bucket
We tried a few cases from random and genetic linkage analysis
networks which SMBBF could not solve (4 random networks of
sizes 100, 110, 120, and 130 and pedigree13 from the genetic
linkage analysis network).
Conclusion
Novel and efficient heuristic for dynamic
variable ordering for computing the MPE
in Bayesian networks.
A significant improvement in time and
space over less sophisticated heuristics
and other MPE tools.
Many hard network instances solved for
the first time.