Sparse Representations and the Basis Pursuit Algorithm
advertisement

An Introduction to Sparse
Representation
and the K-SVD Algorithm
Ron Rubinstein
The CS Department
The Technion – Israel Institute of technology
Haifa 32000, Israel
University of Erlangen - Nürnberg
April 2008
D x
Noise Removal ?
Our story begins with image denoising …
?
Remove
Additive
Noise
Practical application
A convenient platform (being the simplest inverse
problem) for testing basic ideas in image processing.
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
2
Denoising By Energy Minimization
Many of the proposed denoising algorithms are related to the minimization
of an energy function of the form
1
2
f x
xy
2
2
y : Given measurements
x : Unknown to be recovered
Sanity (relation to
measurements)
Pr x
Prior or regularization
•
This is in-fact a Bayesian point of view, adopting the
Maximum-Aposteriori Probability (MAP) estimation.
•
Clearly, the wisdom in such an approach is within the
choice of the prior – modeling the images of interest.
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
Thomas Bayes
1702 - 1761
3
The Evolution Of Pr(x)
During the past several decades we have made all sort of guesses
about the prior Pr(x) for images:
2
Pr x x 2
2
Pr x L x 2
Energy
Prx x
Smoothness
1
D x
Adapt+
Smooth
Prx W x 1 Pr x = Bx 1
TotalVariation
2
Pr x L x W
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
Wavelet
Sparsity
Bilateral
Filter
Prx L x
Robust
Statistics
Pr x 0
0
for x D
Sparse &
Redundant
4
Agenda
1. A Visit to
Sparseland
Introducing sparsity & overcompleteness
2. Transforms & Regularizations
How & why should this work?
Welcome
to
Sparseland
3. What about the dictionary?
The quest for the origin of signals
4. Putting it all together
Image filling, denoising, compression, …
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
5
Generating Signals in Sparseland
K
M
N
Fixed Dictionary
Sparse &
random
vector
D α
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
N
x
• Every column in
D (dictionary) is
a prototype
signal (atom).
• The vector is
generated
randomly with
few non-zeros in
random locations
and with random
values.
6
Sparseland Signals Are Special
M
α
Multiply
by D
x Dα
• Simple: Every signal is built
as a linear combination of
a few atoms from the
dictionary D.
• Effective: Recent works
adopt this model and
successfully deploy it to
applications.
• Empirically established:
Neurological studies show
similarity between this model
and early vision processes.
[Olshausen & Field (’96)]
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
7
Transforms in Sparseland ?
• Assume that x is known to emerge from
M.
.
• How about "Given x, find the α that generated it in M " ?
N
x
Dα
M
T
α K
D
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
8
Problem Statement
We need to solve an
under-determined
linear system of equations:
• Among all (infinitely
many) possible solutions
we want the sparsest !!
• We will measure sparsity
using the L0 "norm":
α
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
Dαx
Known
0
9
Measure of Sparsity?
k
x p = xj
p
p
2
f x xp
j=1
2
p
p
As p 0 we
get a count
of the non-zeros
in the vector
α
D x
0
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
1
-1
1
1
p
p
p0
p 1
+1
x
10
Where We Are
A sparse
& random
vector
α
Min α
Multiply
by D
α
x Dα
3 Major
Questions
D x
• Is
αα
ˆ
0
s.t. x Dα
α̂
?
• NP-hard: practical ways to get
α̂ ?
• How do we know D?
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
11
Inverse Problems in Sparseland ?
• Assume that x is known to emerge from
M.
• Suppose we observe y H x v , a degraded and noisy
version of x with v 2 ε. How do we recover x?
• How about "find the α that generated y " ?
y M
M
Dα
Hx
N
x
Q
α K
ˆ
Noise
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
12
Inverse Problem Statement
v
x Dα
A sparse
& random
vector
α
Multiply
by D
Min α
"blur"
by H
α
y HDα
y Hx v
3 Major
Questions
(again!)
D x
• Is
αα
ˆ
0
s.t.
2
ε
α̂
?
• How can we compute
α̂ ?
• What D should we use?
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
13
Agenda
1. A Visit to
Sparseland
Introducing sparsity & overcompleteness
T
2. Transforms & Regularizations
How & why should this work?
3. What about the dictionary?
The quest for the origin of signals
Q
4. Putting it all together
Image filling, denoising, compression, …
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
14
The Sparse Coding Problem
Our dream for now: Find
the sparsest solution to
Dαx
Known
Put formally,
P0 : Min α 0 s.t. x Dα
α
known
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
15
Question 1 – Uniqueness?
M
α
x Dα
Min α
Multiply
by D
α
0
s.t. x Dα
α̂
Suppose we can
solve this exactly
Why should we necessarily get
α α?
ˆ
α 0 α 0.
It might happen that eventually ˆ
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
16
Matrix "Spark"
Definition: Given a matrix D, =Spark{D} is the smallest
and and
number of columns that are linearly dependent.
Donoho & Elad (‘02)
• By definition, if Dv=0 then v 0
• Say I have 1 and you have 2, and the two are
different representations of the same x :
x D 1 D 2
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
D 1 2 0
1 2 0
17
Uniqueness Rule
• Now, what if my 1 satisfies 1
?
0
2
• The rule 1 2 0 implies that 2
0
Uniqueness
Donoho & Elad (‘02)
!
2
If we have a representation that satisfies
σ
α0
2
then necessarily it is the sparsest.
So, if M generates signals using "sparse enough" ,
the solution of
P0 : Min α 0 s.t. x Dα
will find them exactly.
α
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
18
Question 2 – Practical P0 Solver?
M
α
Multiply
by D
x Dα
Min α
α
0
s.t. x Dα
Are there reasonable ways to find
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
α̂
α̂ ?
19
Matching Pursuit (MP) Mallat & Zhang (1993)
• The MP is a greedy
algorithm that finds one
atom at a time.
• Step 1: find the one atom
that best matches the signal.
• Next steps: given the
previously found atoms, find
the next one to best fit …
• The Orthogonal MP (OMP) is an improved
version that re-evaluates the coefficients after
each round.
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
20
Basis Pursuit (BP) Chen, Donoho, & Saunders (1995)
Instead of solving
Min α 0 s.t. x Dα
α
Solve this:
Min α 1 s.t. x Dα
α
• The newly defined problem is convex (linear programming).
• Very efficient solvers can be deployed:
Interior point methods [Chen, Donoho, & Saunders (`95)] ,
Iterated shrinkage
[Figuerido & Nowak (`03), Daubechies, Defrise, & Demole (‘04),
Elad (`05), Elad, Matalon, & Zibulevsky (`06)].
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
21
Question 3 – Approx. Quality?
M
α
Multiply
by D
x Dα
MP/BP
α̂
How effective are MP/BP ?
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
22
BP and MP Performance
Donoho & Elad
Gribonval & Nielsen
Tropp
Temlyakov
(‘02)
(‘03)
(‘03)
(‘03)
Given a signal x with a representation
x Dα , if 0 (somethreshold ) then
BP and MP are guaranteed to find it.
MP and BP are different in general (hard to say which is better).
The above results correspond to the worst-case.
Average performance results available too, showing much better
bounds [Donoho (`04), Candes et.al. (`04), Tanner et.al. (`05), Tropp et.al. (`06)].
• Similar results for general inverse problems
[Donoho, Elad & Temlyakov
(`04), Tropp (`04), Fuchs (`04), Gribonval et. al. (`05)].
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
23
Agenda
1. A Visit to
Sparseland
Introducing sparsity & overcompleteness
2. Transforms & Regularizations
How & why should this work?
3. What about the dictionary?
The quest for the origin of signals
4. Putting it all together
Image filling, denoising, compression, …
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
24
Problem Setting
M
α
Multiply
by D
x Dα
α 0 L
D x
P
Xj
j 1
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
Given these P examples and
a fixed size (NK) dictionary,
how would we find D?
25
The Objective Function
X
DA X F
2
Min
D, A
The examples are
linear combinations
of atoms from D
D
A
s.t. j, j 0 L
Each example has a
sparse representation with
no more than L atoms
(N,K,L are assumed known, D has normalized columns)
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
26
K–SVD – An Overview
D
Initialize
D
Sparse Coding
Use MP or BP
Dictionary
Update
X
T
Column-by-Column by
SVD computation
Aharon, Elad & Bruckstein (‘04)
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
27
K–SVD: Sparse Coding Stage
DA X F
2
Min
A
s.t. j, α j 0 L
For the jth
example
we solve
Min Dα x j
α
2
D
X
T
s.t. α 0 L
2
Ordinary Sparse Coding !
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
28
K–SVD: Dictionary Update Stage
DA X F
2
Min
D
s.t. j, α j 0 L
D
For the kth
atom
we solve
Min
dk
Ek
d a
j k
D x
T
j j
T
k k
d a Ek
2
X
T
F
X (the residual)
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
29
K–SVD Dictionary Update Stage
Min
dk
T
k k
d a Ek
2
D
F
We can do
better than
this
Min
dk ,ak
T
k k
d a Ek
2
F
X
T
But wait! What
about sparsity?
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
30
K–SVD Dictionary Update Stage
We want to solve:
Min
dk ,a k
dk
Only some of
the examples
use column dk!
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
a
T
k
Ek
When updating ak,
only recompute
the coefficients
corresponding to
those examples
2
F
Solve with
SVD!
31
The K–SVD Algorithm – Summary
D
Initialize
D
Sparse Coding
Use MP or BP
Dictionary
Update
X
T
Column-by-Column by
SVD computation
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
32
Agenda
1. A Visit to
Sparseland
Introducing sparsity & overcompleteness
2. Transforms & Regularizations
How & why should this work?
3. What about the dictionary?
The quest for the origin of signals
4. Putting it all together
Image filling, denoising, compression, …
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
33
Image Inpainting: Theory
Assumption: the signal x was created
by x=Dα0 with a very sparse α0.
D α0 x
Missing values in x imply
missing rows in this linear
system.
By removing these rows, we get
.
Dα0 = x
Now solve
Min
0
=
~ ~
s.t. x D
If α0 was sparse enough, it will be the solution of the
above problem! Thus, computing Dα0 recovers x perfectly.
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
34
Inpainting: The Practice
We define a diagonal mask operator W representing the lost
samples, so that
w i,i {0,1}
y = Wx + v
Given y, we try to recover the representation of x, by solving
α̂ = ArgMin α
α
0
s.t. y - WDα
2
x̂ D
ˆ
We use a dictionary that is the sum of two dictionaries, to get an
effective representation of both texture and cartoon contents. This
also leads to image separation [Elad, Starck, & Donoho (’05)]
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
35
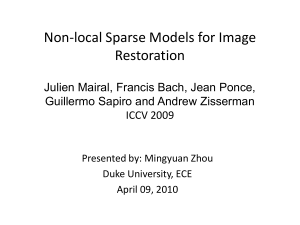
Inpainting Results
Dictionary:
Curvelet (cartoon)
+ Global DCT
(texture)
Source
Outcome
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
36
Inpainting Results
Dictionary:
Curvelet (cartoon)
+ Overlapped
DCT (texture)
Source
Outcome
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
37
Inpainting Results
20%
50%
80%
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
38
Denoising: Theory and Practice
Given a noisy image y, we can clean it by solving
α̂ = ArgMin α
α
0
s.t. y - Dα
2
x̂ D
ˆ
Can we use the K-SVD dictionary?
With K-SVD, we cannot train a dictionary for an entire
image. How do we go from local treatment of patches to a
global prior?
Solution: force shift-invariant sparsity – for each NxN
patch of the image, including overlaps.
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
39
From Local to Global Treatment
α̂ = ArgMin α
α
0
s.t. y - Dα
2
x̂ D
ˆ
For patches,
our MAP penalty
becomes
ˆx = ArgMin 1 x - y
x ,{αij }ij
2
2
2
+ μ R ij x - Dαij
ij
s.t. αij 0 L
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
2
Extracts the
2 (i,j)th patch
Our prior
40
What Data to Train On?
Option 1:
Use a database of images: works quite well
(~0.5-1dB below the state-of-the-art)
Option 2:
Use the corrupted image itself !
Simply sweep through all NxN patches
(with overlaps) and use them to train
Image of size 1000x1000 pixels
~106
examples to use – more than enough.
This works much better!
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
41
Image Denoising: The Algorithm
ˆx = ArgMin 1 x - y
x ,{αij }ij ,D 2
2
2
+ μ R ij x - Dαij
ij
x and D known
x and ij known
Compute ij per patch
Compute D to minimize
αij = Min R ij x - Dα
α
2
2
s.t. αij 0 L
using matching pursuit
Min R ij x - Dα
D
ij
2
2
using SVD, updating one
column at a time
2
2
s.t. αij 0 L
D and ij known
Compute x by
x I RijTRij
ij
1
y RijTDij
ij
which is a simple averaging
of shifted patches
K-SVD
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
42
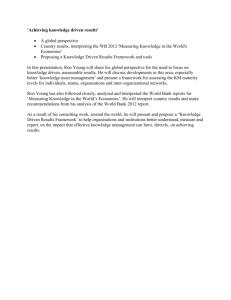
Denoising Results
Source
Result 30.829dB
Noisy image
PSNR 22.1dB
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
Initial dictionary
Obtained
dictionary
(overcomplete
DCT) 64×256
after 10 iterations
43
Denoising Results: 3D
Source:
Vis. Male Head
(Slice #137)
2d-KSVD:
PSNR=27.3dB
3d-KSVD:
PSNR=12dB
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
PSNR=32.4dB
44
Image Compression
Problem: compressing photo-ID images.
General purpose methods (JPEG,
JPEG2000) do not take into account the
specific family.
By adapting to the image-content,
better results can be obtained.
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
45
Compression: The Algorithm
Divide each image to disjoint
15x15 patches, and for each
compute a unique dictionary
Divide to disjoint patches, and
sparse-code each patch
Quantize and entropy-code
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
Compression
Detect features and align
Training set (2500 images)
Training
Detect main features and align
the images to a common
reference (20 parameters)
46
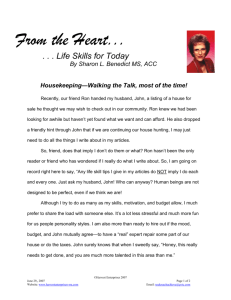
Compression Results
Original
JPEG
JPEG 2000
PCA
K-SVD
11.99
10.49
8.81
5.56
10.83
8.92
7.89
4.82
10.93
8.71
8.61
5.58
Results for
820 bytes
per image
Bottom:
RMSE values
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
47
Compression Results
Original
JPEG
JPEG 2000
PCA
K-SVD
15.81
13.89
10.66
6.60
14.67
12.41
9.44
5.49
15.30
12.57
10.27
6.36
Results for
550 bytes
per image
Bottom:
RMSE values
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
48
Today We Have Discussed
1. A Visit to
Sparseland
Introducing sparsity & overcompleteness
2. Transforms & Regularizations
How & why should this work?
3. What about the dictionary?
The quest for the origin of signals
4. Putting it all together
Image filling, denoising, compression, …
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
49
Summary
Sparsity and overcompleteness are important
ideas for designing better
tools in signal and image
processing
What
next?
Coping with
an NP-hard
problem
We have seen
inpainting, denoising
and compression
algorithms.
(a) Generalizations: multiscale, nonnegative,…
(b) Speed-ups and improved algorithms
Approximation algorithms
can be used, are
theoretically established and
work well in practice
What dictionary
to use?
How is all
Several dictionaries
this used? already exist. We have
shown how to
practically train D
using the K-SVD
(c) Deploy to other applications
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
50
Why Over-Completeness?
0.1
0.05
1
0
-0.05
-0.1
0.1
2
0.05
0
1.0
0
0.3
0.1 10
0 10-2
-0.05
-0.1
+
1
3
0.5
0.5
0
1
4
0.5
00
64
D x
-0.1
-4
10
-0.2
-6
10
-0.3
|T{1+0.32}|
-0.410-8
-0.5 -10
10
0
-0.6
0.05
|T{1+0.32+0.53+0.054}|
20
40
60
80
100
120
DCT Coefficients
128
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
51
Desired Decomposition
10
0
-2
10
10
10
10
-4
-6
-8
-10
10
0
40
80
DCT Coefficients
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
120
160
200
240
Spike (Identity) Coefficients
52
Inpainting Results
70% Missing Samples
DCT (RMSE=0.04)
Haar (RMSE=0.045)
K-SVD (RMSE=0.03)
90% Missing Samples
DCT (RMSE=0.085_
Haar (RMSE=0.07)
K-SVD (RMSE=0.06)
D x
An Introduction to
Sparse Representation
And the K-SVD Algorithm
Ron Rubinstein
53