Paper template

ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78
DOI: 10.15593/RJBiomech/2015.1.07
REGION OF RESISTANCE OF TOOTH:
EXPERIMENTAL DETERMINATION
А.L. Dubinin
Department of Theoretical Mechanics and Biomechanics, Perm National Research Polytechnic University,
29 Komsomolskii Prospect, 614990, Perm, Russia, e-mail: aspalexey@rambler.ru
Abstract.
In order to study the initial tooth movement, the concept of the center of resistance was introduced. Properties of this point are: if the applied force system is reduced to the single force with the line of action passing through the center of resistance, then the tooth will start to move translationally; if the applied force system is reduced to the force couple, then the tooth will rotate around this center. Later, it was shown that the center of resistance exists at the exceptional conditions (existing of the axis of symmetry for the root of the tooth). Therefore, in cases where there is no center of resistance, a ne w concept “region of resistance of the tooth” was introduced. The region is called the region of resistance of a tooth with the minimal diameter at possessing the following properties: any line of translational action passes through this region and through any point of this region passes some line of translational action. It has been shown that region of resistance can be an ellipse, two points, and one point. In presented study, the method of finding the region of resistance for the particular case was developed by two approaches: 1) finding the set of all lines of translational action;
2) analytically. The relation between the region of resistance and tooth root shape was established experimentally. Also, the transition from one type of region of resistance to other was shown by varying geometrical parameters of the body. Some properties of certain types of region were investigated. Another case of the existence of the center of resistance was shown, which has not been considered earlier.
Key words: center of resistance of tooth, region of resistance of tooth, dentition, orthodontic tooth movement, experimental determination.
I NTRODUCTION
Where and how the force should be applied to move the teeth into the desired location? This question is crucial at orthodontic treatment. It is very difficult to give an answer because it is necessary to consider a number of factors affecting this process: the reaction of tissues surrounding tooth, their individual mechanical properties, complex physiological processes, characteristics of the device having force influence, set device features and other [3, 10, 11].
In this article, the question of initial tooth movement is considered. Model is accepted as follows (typical for most of the works on this theme [1, 2, 4, 5, 7, 8, 12, 13]): Tooth surrounded by periodontal ligament is treated as perfectly rigid body immersed in linear elastic medium at the stable equilibrium state. At the applied force system, tooth has small movements within the alveolar pit. For the studying of initial tooth movement, definition of center of resistance is used often. It was introduced in 1917 [6]. The point is called the centre of resistance of a tooth if it possesses the following properties: any line of translational action passes through this point and any line that passes through this point is the line of translational action. The value and direction of force applied to tooth do not affect on location of center of
© Dubinin А.L., 2015
Aleksei L. Dubinin, Post-Graduate Student of Department of Theoretical Mechanics and Biomechanics, Perm
А.L. Dubinin а b c
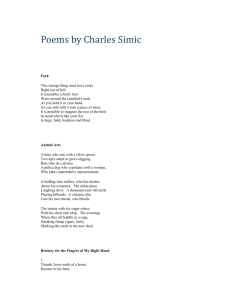
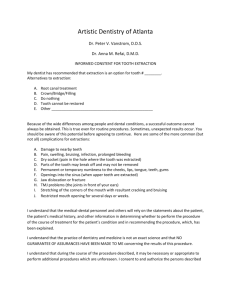
Fig. 1. Regions of resistance types: а is ellipse; b is two points; c is one point; black line is line of translational action, gray point is point of region of
resistance resistance, but tooth root form and elastic properties of surrounded medium do. It is also known, that the conditions of the center of resistance existence are limited by strong restrictions, such as the existence of the axis of symmetry of the tooth root [3]. It is possible to use the definition of center of resistance if tooth is considered as idealized axisymmetric body.
But for the deeper studying, new idea is necessary.
The work [4] gave corresponding generalization and this is “region of resistance of a tooth”. The region is called the region of resistance of a tooth if it has the minimal diameter at possessing the following properties: any line of translational action passes through this region and through any point of this region passes some line of translational action. It exists always and saves main properties of center of resistance. It is shown that the region of resistance may be the set of points forming an ellipse, two, or one point (Fig. 1).
Type of region of resistance in Fig. 1, a corresponds to general case of tooth root form. Every possible line of translational action is necessarily passes through any of points of region of resistance (ellipse of minimal diameter). Types of region of resistance in Figs. 1, b, c are for particular cases of existing of symmetry elements in the body. It is shown that in
Fig. 1, с
, region of resistance consists of one point, through which all lines of translational action are passing. In this case region of resistance reduces to center of resistance.
It should to be noted, region of resistance is not only definition appeared in scientific literature for the period 2013-2014 suggested to study initial tooth movements, when the center of resistance does not exist [1, 6, 10].
D ETERMINATION OF REGION OF RESISTANCE LOCATION
The present work is a continuation of ideas developed in articles [8, 9], where center/region of resistance theory is based on the following model: Tooth surrounded by periodontal ligament is treated as perfectly rigid body immersed in linear elastic medium at the stable equilibrium state. At the applied force system, tooth has small movements within the alveolar pit. Let
be a column of pole displacement components;
is a column of components of the small rotation about the pole; R is the principal vector of the forces; M is the principal moment of forces with respect to the pole. Then, owing to the linear elasticity of medium
70 ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78
Region of resistance of tooth: experimental determination
ˆ
ˆ
T
ˆ
ˆ
, (1) where
ˆ ˆ ˆ
are matrixes depending on the shape of the tooth root and the elastic properties of periodontal ligament and pole location. Matrix of the system (1) is symmetrical and positive definite one. Hence,
ˆ ,
are symmetrical and positive-definite too,
ˆ
is asymmetrical one in general case.
Let
ˆ
be the symmetric part of matrix
ˆ
1 ; ˆ
be the antisymmetric part of matrix
ˆ
1
;
is the vector corresponding to the matrix ˆ
. It is can be showed that the centre of resistance exists if and only if
ˆ 0
, its coordinates are the components of vector
. If
, then the centre of resistance does not exist, but the lines of translational action still may exist and set of them will determine region of resistance. Also, this region can be determined analytically. In this case, components of
are coordinates of center of region of resistance
(for case in Fig. 1, a , it is ellipse center; for case in Fig. 1, b , it is middle between two points, for case in Fig. 1, c , it is center of resistance). Directing the coordinate axes along the principal axes of matrix
ˆ
, we can determine the location of region of resistance. Eigenvalues
ˆ
determine size of this region.
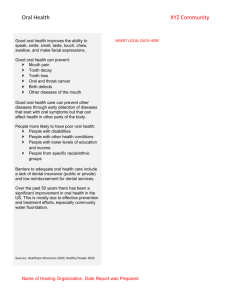
However, for analytical determination of region of resistance location, coefficients of matrix of system (1) must be known. To calculate them, periodontal ligament is assumed as set of springs with certain elastic coefficients c i
. Its spatial orientation is given by coordinates of the points of attachment to the tooth ( , , i
) and angles
i
with the coordinates axes (Fig. 2). The virtual work principle is used. The sum of virtual works of external forces is equal to the sum of virtual works of stresses
j
A j e i
A i
. z y
0 x r i
P i i z ’ y
’
i
а b
i n i
l i
i x ’
Fig. 2. Problem scheme: а is spatial model of tooth surrounded by springs; b is i -spring location
ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78 71
А.L. Dubinin
Let us give virtual displacements to the points and write the virtual work of external forces
i
and virtual work of stresses
i
i i
i i
P r i
i
i c i
i i
, (2) where
r i
is virtual displacement of point of i -spring attachment to tooth,
l i
is i -spring elongation vector.
Virtual displacement of the point is made up of virtual translational movement along with a pole (at the origin)
r
0
and rotation with the infinitesimal angle around the pole
i 0 r i
.
Similarly, for the actual small displacement
r i where
r i
,
r
0
is actual pole displacement;
is vector of small angle of rotation around the i pole at applied force system.
We represent
r i
in the view r i r ix i
r iy j
r iz k as scalar product of actual displacement vector
and elongation of
r i
and unit vector n i i -spring
l i
–
along the axes of
-spring l i r n i i
) n i
( r ix cos
i r iy cos
i r iz cos
i
) n i
. Thus, we substitute these values in the right hand side of expression (2) and writing projections of virtual and actual displacements, we obtain
i
i c i
(
x a
y b
z d x e f where g x i a
cos
i
y i i
, b
cos
i
.
( a x
0 b y d z
0 e
i
, d
cos
i
, e z i x f y y i g z g ) z
),
, f x z i
(3)
,
We can write sum of virtual works of external forces through the generalized forces
i
P r i i
Q x x 0
Q y y 0
Q z z 0
M x
x
M y
y
M z
z
. (4)
Then, comparing expression (3) and (4), generalized forces can be found as coefficients at same variations of generalized coordinates. Combining them into a system of equations, we obtain
Q x
Q y
M
M
Q z
M x y z
i
i
i
i
i i
c i
(
x a
0
y b
0
z d
0
x e y f
z c i
(
x a
y b
z d x e y f
c i
(
x a
0
y b
0
z d
0
x e y f
c i
(
x a
y b
z d e y f
c i
(
x a
0
y b
0
z d
0 x e y f
z z c i
(
x a
0
y b
0
z d
0
x e y f
z z z
72 ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78
Region of resistance of tooth: experimental determination
Let us write this system of equations in matrix form
Q x
Q
Q
M y z
M
M x z y
i
2 c a c ab c ad c ae c af c ag i
2 i i c ba c b c bd c be c bf c bg i i i i i i
2 i i
2 c fa c fb c fd c fe c f c fg i i i i i i i i c da c db c d c de c df c dg i
2 i i i c ea c eb c ed c e c ef c eg i i i i i i c ga c gb c gd c ge c gf c g i i i i i i
2
x y z
0
0
0
y
z x
.
(5)
Matrix (5) is symmetric positive-definite one. It has a size of 6×6 and includes 21 independent components which are depended on the shape of the tooth root, the elastic properties of periodontium and pole location. It is seen, the unknown system matrix (1) can be obtained as an inverse of the determined matrix (5).
This algorithm is programmed in Matlab and allows us to determine the location of the center/region of resistance in particular cases.
R ELATION BETWEEN REGION OF RESISTANCE TYPE AND TOOTH ROOT FORM
To investigate types of region of resistance, we direct coordinate axes along the principal axes
ˆ
and place the pole O * in the point determined by the vector
. For searching a set of translational axes lines in work [4], equation of the second order surface was obtained
1 x
2
2 y
2
3 z
2
1 2 3
0 , (6) where
i
are eigenvalues of matrix
ˆ
; , , are components of vector r . matrix
Passing through the every point on the surface (6) the line along the eigenvector of
ˆ ˆ
1
, corresponding to the zero eigenvalue of this matrix, we obtain a set of lines of translational action. Combination of the number signs hence, region of resistance. Values
i
determine type of this set and,
i
determine size of the region of resistance.
General case
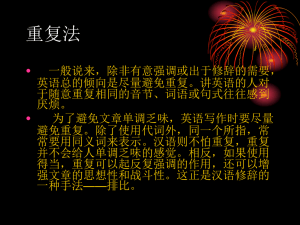
Tooth root has a form (closed to physiological) of upper incisor (without any symmetry elements) (Fig. 3, a ). Using the program in this case, we can obtain
i
:
1
0.0653;
2
0.007;
3
0.0344.
Surface equation (6) takes the form of canonical equation of hyperboloid of one sheet. x
2 y
2
z
2
0.015
0.047
0.021
1 .
All available translational action lines are located in such a way that they are one of the two families of hyperboloid generating lines (Fig. 3, b ). Region of resistance type is ellipse of minimal diameter (Fig. 3, c ).
ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78 73
А.L. Dubinin y x y x y x y z z x z
а b c
Fig. 3. To general case: а
is location of hyperboloid relative to the tooth root (blue lines are root borders, purple lines are springs); b is relation of hyperboloid and translational action lines (red lines); c is ellipse location in three planes: green line is y -semiaxis, red line is x -semiaxis)
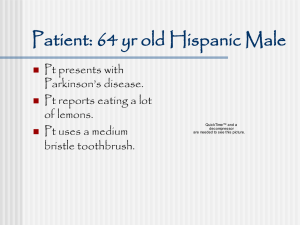
Any symmetry case а) Tooth root has a form having one symmetry plane (Fig. 4). Eigenvalues are
0.41; 0; 0.41.
Surface equation (6) takes the form of canonical equation of two intersecting planes.
0.41
z
2
0.41
x
2
0 .
All available translational action lines pass through the one point and lie in the plane yz , but this point is not center of resistance in full sense of this definition. This case of symmetry was considered in work [1] and relates to the definition “center of resistance in plane of symmetry”. b) Tooth root has a form of rectangular parallelepiped having two symmetry planes
(Fig. 5). Eigenvalues are
1
0.33;
2
0;
3
0.33.
Surface equation (6) takes the form of canonical equation of two intersecting planes. It should to be noted, these planes are mutually perpendicular (since
).
3 1
0.33
z
2
0.33
x
2
0 .
Region resistance type is two points lying on the line of intersection of two planes. y y x z z x
Fig. 4. To the one symmetry plane case. Blue point is center of resistance in plane,
red lines are translational action lines z
74 ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78
Region of resistance of tooth: experimental determination
0; c) Tooth root has a symmetry axis of n -order ( n > 2) (Fig. 6). Eigenvalues are
1
0;
0.
Hence, region of resistance coincides with center of resistance and all translational action lines are intersected in one point.
Other types of region of resistance shown in work [9] do not considered in present article, because it is possible that does not exist such tooth root form, where
could take i corresponding combinations of signs. This arque is experimentally proved during numerous varying of forms of the body immersed in an elastic medium. y y x z z
Fig. 5. To the two symmetry plane case. Blue, green points are points of region of resistance, red lines are translational action lines x а y x y z x b y x y z z x z
Fig. 6. To the symmetry axis case: а
is symmetry axis of 4 th order; b is symmetry axis of
6 th order; red lines are translational action lines
ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78 75
А.L. Dubinin
R ELATION BETWEEN TYPES OF REGION OF RESISTANCE
This paragraph demonstrates an experiment, whose aim was to observe the general nature of the different types of region of resistance. It clearly reflects the transition from one type of region to another by changing the geometrical parameters of the “tooth–periodontium” system.
First, the body of arbitrary form was taken (Fig. 7, a ) and gradually transformed in the body having an axis of symmetry of n -order ( n > 2) (Fig. 7, b ). In the process of transition, values
have been fixed at each stage of deformation and then, they were united in the graph i
(Fig. 8), reflecting the dependence on variable parameters. Interval AB characterizes the transition from an arbitrary form A to the appearance of two symmetry planes B (see Figs. 7,
8). At the aspiration of
2
to zero, region of resistance (ellipse) undergoes changes in the size and orientation as follows: 1) values of semiaxes of ellipse are decreased, at that x -semiaxis is equal to 0 at moment B (see Fig. 7, a ); 2) the non-zero eigenvector of matrix
ˆ
is coincided z , mm
4
A z
Fig. 7. To the experiment: а
– experimental first-step model; б
– process of deformation of body z , mm
4
B
а b
A
B
C
A
B
3 3
2
–0.4 0 0.4
C
2
–0.4 0 0.4
i
Semiaxes, mm
C
а b
Fig. 8. Dependences of changes of
i
( а
) and semiaxes of ellipse ( b ) on changes of tooth root form along the z -axis: а
) blue line is
1
; green line is
2
; red line is
3
; b ) blue line is x -semiaxis; green line is y -semiaxis x
76 ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78
Region of resistance of tooth: experimental determination z , mm
15
0
–15
2 z , mm
1
3
15
0
i
–15
а b
Fig. 9. Dependences of changes of
i
( а ) and semiaxes of ellipse ( b ) on changes of tooth root form along the z -axis.
Notations are the same as in Fig. 8 y x z
Fig. 10. Picture of deformation stage of the body when z = 11
(i.е.
2
= 0 ) with the line of intersection of two planes. At the reaching the B form, the ellipse transforms into a straight line. The transition BC is characterized proportional decreasing of
values. At i the reaching the C form, the body has the axis of symmetry of n -order (in present case n = 4).
All
i
and the semiaxes are zero, indicating reducing of region of resistance in a single point – the center of resistance.
Also, it is interesting to go beyond the physiological form of the tooth root and observe the broader pattern of values change
i
. The body is selected as rectangular parallelepiped. Deforming this body, symmetry is broken, wherein one of the vertical edges is stretched.
Analyzing the graph of dependence of values can be seen, that
2
i
on changed parameters (see Fig. 9), it
takes zero-values in three points z
1
2.4; z
2
4; z
3
11.
In these points, type of region of resistance corresponds to 0; 0;
0 . In point z
2
, result is expected, but in points z z
1
,
3
the body does not have any external observed symmetry, but this type of region of resistance is inherent to it still (Fig. 10). Surface equation (6) in this points takes the form of two intersected planes, but they will not be mutually perpendicular, because angle coefficient k
1 .
C ONCLUSIONS
Presented investigation is a continuation of the ideas and theory developed in works
[8, 9]. In these ones, it is showed that the center of resistance of the tooth does not always exist and for those cases, a new concept of region of resistance is introduced. The results of this study are the developing of technique to determinate the location of the region of resistance analytically or by finding the set of translational action lines. The relation between the type of the region of resistance and the geometric parameters of the “tooth–periodontium”
ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78 77
А.L. Dubinin system is established. The process of transition from one type of region to another is considered. Also, it is experimentally shown, that the center of resistance may exist in bodies with the axis of symmetry of n -order ( n > 2).
A CKNOWLEDGEMENT
The author is grateful to Y.I. Nyashin, M.A. Osipenko, V.S. Tuktamyshev for their help, valuable comments and constant attention to this work.
Investigation was made at support by Russian Fund for Basic Research within the scientific project №15-01-04932
R EFERENCES
1.
Burstone C.J. Biomechanics of Tooth Movement. Philadelphia: Lea & Febiger, 1962, 213 p.
2.
Dathe H., Nägerl H., Kubein-Meesenburg D. A caveat concerning center of resistance. Journal of Dental
Biomechanics, 2013, vol. 4, pp. 1-7.
3.
Dubinin A.L., Nyashin Y.I., Osipenko M.A. Analiz razvitiya ponyatiya “tsentra soprotivleniya zuba”
[Analysis of development of the concept “center of resistance of tooth”]. Russian Journal of Biomechanics , vol. 18, no. 4, pp. 393–409 ( in Russian ).
4.
Dubinin A.L., Nyashin Y.I., Osipenko M.A., Tuktamyshev V.S. Ortodonticheskoe peremeshchenie zubov.
Ponyatie tsentra soprotivleniya i oblasti soprotivleniya zuba [Orthodontic tooth movement. Definition of centre of resistance and region of resistance of tooth]. Theses of referates of XI Russian conference with international involvement and school-seminar for young scientists «Biomechanics-2014», Perm, 2014.
Pp. 53–54 ( in Russian ).
5.
Dubinin A.L., Osipenko M.A., Nyashin Y.I., Tuktamyshev V.S. Ponyatie tsentra soprotivleniya i oblasti soprotivleniya zuba [Definition of centre of resistance and region of resistance of tooth]. Mathematical modeling in natural media. Perm, 2014. Pp. 91–92 ( in Russian ).
6.
Fish G.D. Some engineering principles of possible interest to orthodontists. Dental Cosmetics, 1917, vol. 59, pp. 881-889.
7.
Geiger M.E., Schmidt F., Lapatki B.G. Centre of resistance of constructed tooth models of various morphologies. 18th Symposium on Computational Biomechanics in Ulm. Ulm, 2013.
8.
Osipenko M.A., Nyashin M.Y., Nyashin Y.I. Center of resistance and center of rotation of a tooth: the definitions, conditions of existence, properties. Russian Journal of Biomechanics , 1999, vol. 3, no. 1, pp. 1-11.
9.
Osipenko M.A., Nyashin Y.I., Nyashin M.Y., Dubinin A.L. Region of resistance of a tooth: the definition and the properties. Russian Journal of Biomechanics , 2013, vol. 17, no. 2, pp. 25-31.
10.
Profit W.R. Modern Orthodontics. St. Louis: Mosby Inc., 2000, 836 p.
11.
Ravinda N. Biomechanics and Estetic Strategies in Clinical Orthodontics. St. Louis: Elsevier, 2009, 396 p.
12.
Viecilli R.F., Budiman A., Burstone C.J. Axes of resistance for tooth movement: does the center of resistance exist in 3-dimensional space? American Journal of Orthodontics and Dentofacial Orthopaedics ,
2013, vol. 143, no. 2, pp. 163-172.
13.
Vollmer D., Bourauel C., Maier K., Jäger A. Determination of the centre of resistance in an upper human canine and idealized tooth model. European Journal of Orthodontics , 1999, vol. 21, no. 6, pp. 633-648.
Received 20 February 2014
78 ISSN 1812-5123. Russian Journal of Biomechanics. 2015. Vol. 19, No. 1: 69-78