Programming & Development of Mobile & Embedded Systems
advertisement

Programming & Development of
Mobile & Embedded Systems
Lin Zhong
ELEC424, Fall 2010
Outline
• Programming basics
• Programming MSP430
• Programming Windows Mobile devices
2
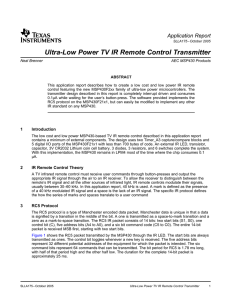
Programming basics
• How programmable systems work
executables
Instruction
fetching
Execution unit
Non-volatile storage
Processing
Programming is about changing the content of non-volatile storage
•PC: Hard drive
•Mobile Devices: Flash ROM
•MSP430: Flash ROM
Many input channels can work
•PC: DVD/CD drive M, USB drive, Ethernet, Wi-Fi
•Mobile Devices: USB port, Bluetooth, Cellular, Wi-Fi
•MSP430: Any input (even analog!!!!)
3
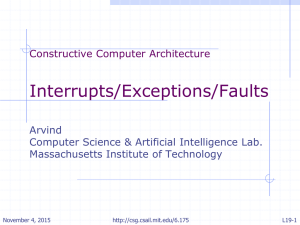
Programming basics (Contd.)
• How executables are generated?
Compile
High-level language
•C/C++/C#/Java
•Matlab/Labview
•Perl
Compile
Intermediate format
•Assembly
•Java byte code
Machine code
101010100
Machine code
101010100
Machine code
101010100
Link
Machine code
101010100
Compile & link can be done at run-time
• Java & C#: second stage compilation
• Perl/BASIC (interpretive languages)
4
Cross platform development
• Cross compile & Cross link
– Produce the machine code for a foreign platform
– PCMobile devices
• X86 processorsARM processors
– PCOrbit sensors
• X86 processorsMSP430
• Cross development tool chains
– Linux GNU ARM tool chains
– Integrated development environment (IDE)
• Microsoft Visual Studio
• IAR Embedded Workbench
5
IDE concepts
• Projects
– Organized source files
– Properties of target platform
• Run-time debug
– Debug/release modes
• Emulators
– Development without a physical device
6
Programming MSP430
USB cable
JTAG
JTAG
7
IAR Embedded Workbench
• C and C++
• Software emulator
• Free evaluation version
8
IAR Embedded Workbench
• Project options
9
Run-time debugging
10
Getting help
11
Memory space
• Unified address space
• No “cache”
12
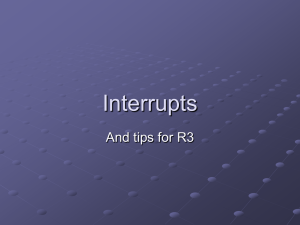
Tilt 2 vs. PC
Registers
CPU
Cache
Main memory
File system cache
Hard disk
13
Special function registers (SFRs)
• 16 registers (R0-R15)
• Program counter (PC)/R0
– Pointer to the next instruction
14
Stack pointer (SP/R1)
• Store the return addresses of subroutine calls and
interrupts
• Stack
–
–
–
–
Last-In, First Out
PUSH
POP
Automatic allocated memory in C
• You don’t need to worry about it
– Take care by the compiler
– Subroutine calls
– Interrupt handlers
15
Status register (SR/R2)
• Can be read and written
Clock
16
Load-store architecture
a.k.a. RISC architecture
Register file
MEM/Cache
Execution unit
Load/store
17
Interrupt-driven programming
Start
System idle
Initialization
Interrupt Interrupt
• Clock
• I/O pins
• Interrupt
• Periperals
TimerA()
USARTRX()
Interrupt handlers
18
Initialization
19
Interrupt properties
• Maskable vs. non-maskable
• Nested
• Priority
20
IAR EWR interrupt
• Enable interrupt
21
IAR EWR interrupt
• Interrupt handler is a special subroutine
22
A problem
– A[0]=1;
– B[0]=1;
• enable interrupt there
• while () {
Interrupt_handler() {
A[0]=2;
B[0]=2;
}
– if (A[0]!=B[0]) exit;
– else continue ;
• }
23
A problem
• A[0]=1;
• B[0]=1;
• while () {
– if (A[0]!=B[0]) exit;
– else continue ;
• }
Interrupt_handler() {
A[0]=2;
B[0]=2;
}
LD R13, (A[0]);
LD R14, (B[0]) ;
CMP R13, R14;
JEQ EXIT
24
Critical section
• A[0]=1;
• B[0]=1;
• while () {
– if (A[0]!=B[0]) exit;
– else continue ;
• }
Section of code that access a
shared resource that must not be
concurrently accessed by more
than one thread of execution
Interrupt_handler() {
A[0]=2;
B[0]=2;
}
LD R13, (A[0]);
LD R14, (B[0]) ;
CMP R13, R14;
JEQ EXIT;
…….
25
Atomic operation
• A set of operations that appears to be one to the
system
– System state change due to the operations invisible until
all the operations are successful
– If any of the operations fails, the entire set fails; and no
change to the system state
• Examples
– An assembly instruction
– Interrupt-disabled
26
When do we need an OS?
27