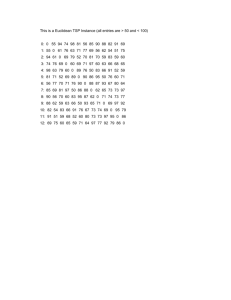
TSP - Apr. 2009
advertisement

Traveling Salesperson Problem
Steven Janke
Colorado College
Traveling Salesperson Problem (TSP)
A
B
C
D
A
B
C
D
A
-
3
4
6
B
2
-
5
2
C
7
4
-
3
D
5
6
7
-
Optimization Problem: Find the least cost tour starting at A, traveling
through the other three cities exactly once and returning to A.
Decision Problem: Is there a TSP tour with cost less than k?
Sir William Hamilton
1805 - 1865
• Discovered quaternions in 1843
• Invented Icosian Game in 1857
• Hamiltonian Circuits
T. P. Kirkman
1806 - 1895
In 1856, he published sufficient
conditions for a polyhedral
graph to have a Hamiltonian
circuit.
Icosian Game 1857
Proctor & Gamble Contest 1962
Twentieth Century History
1931-32 Merrill Flood, A.W.Tucker, Hassler Whitney (Princeton)
pose the Traveling Salesperson Problem.
1947 George B. Dantzig designs simplex method for linear programming.
1954 Connection with the Assignment Problem established.
1962 Dynamic programming formalized.
1972 Karp proved TSP is NP-complete.
1985 – 2008 Techniques leading to solving a 85,000-city problem
TSP Applications:
School Bus routing.
Robotic welding in the car industry.
Printed circuit board drilling and laser cutting of integrated circuits.
Genome sequencing. Finding most likely ordering of markers.
Job processing: Chemical plants – cost of setup to produce chemicals.
Mathais
Herb ‘n Farm
Cutler Hall
Slocum
El Pomar
Packard
Admissions Office Campus Tour
Colorado College
Versions of the TSP:
Complete or Incomplete graph.
Symmetric vs. Asymmetric cost matrix.
Euclidean (Triangle inequality holds.)
Upper Triangular cost matrix.
Circulant cost matrix.
Bipartite graph.
A
A
B
C
D
B
C
A
-
3
4
6
B
2
-
5
2
C
7
4
-
3
D
5
6
7
-
D
Traveling Salesperson Problem: Find the least cost tour starting at A,
traveling through the other three cities exactly once and returning to A.
Generating Permutations:
Recursion:
A < BCD
BDC
CBD
CDB
DBC
DCB
B < ACD
ADC
CAD
CDA
DAC
DCA
C < ABD
ADB
BAD
BDA
DAB
DBA
D < ABC
ACB
BAC
BCA
CAB
CBA
Single exchange:
ABCD
BACD
BCAD
BCDA
CBDA
CBAD
CABD
ACBD
ACDB
CADB
CDAB
CDBA
DCBA
DCAB
DACB
ADCB
ADBC
DABC
DBAC
DBCA
BDCA
BDAC
BADC
ABDC
Naïve Algorithm
1. List all tours and their costs:
A BCD A = 18
A BDC A = 19
A CBD A = 15
A CDB A = 15
A DBC A = 24
A DCB A = 19
2. Find a tour with minimum cost:
A CBD A = 15
(one optimal tour)
Timing results for Naïve Algorithm:
Cities
Seconds
Tours
Sec/Tour
11
0.50
3,628,800
1.38 x 10-7
12
5.61
39,916,800
1.41 x 10-7
13
69.12
479,001,600
1.44 x 10-7
Estimate for 17 cities: 34.9 days (2.09 x 1013 tours)
Complexity:
If there are n-1 cities (other than the home city A), then
there are (n-1)! possible tours.
The naïve algorithm takes at least (n-1)! steps.
A random algorithm could possibly find an optimal
tour in (n-1) steps.
Is there a deterministic algorithm that can find an optimal
tour in a polynomial number of steps?
Theorem: (Karp, 1972) TSP is NP-Complete. (That is, every other
hard problem is reducible to TSP.)
Open problem: Is there a polynomial time algorithm for TSP?
If not, can you prove it? (In technical terms, does P = NP?)
Solving the open problem earns you $1,000,000 from
the Clay Mathematics Institute.
Approaches to the TSP:
Constant TSP: Analyze the cost matrix.
Linear Programming
Euclidean TSP: Probabilistic analysis.
Approximation algorithms
Search techniques
Branch and Bound
Dynamic Programming
Genetic Algorithm
Ant Colony
A
Constant TSP
B
A
B
C
D
A
-
1
3
5
B
10
-
6
8
C
8
2
-
6
D
9
3
5
-
C
D
A BCD A = 22A CBD A = 22A DBC A = 22
A BDC A = 22A CDB A = 22A DCB A = 22
Theorem: (Constant TSP)
The only cost matrices that give the same cost for all TSP tours
are those with entries that satisfy:
cij = ai + bj
Sketch of Proof:
The set C of matrices with constant cost form a linear subspace.
The dimension of C is 2n-1.
The matrices with either a single row of ones or a single column
of ones belong to C and any set of 2n-1 of them are linearly
independent.
Constant TSP:
a
b
c
1
6
-
1
3
5
4
0
10
-
6
8
2
2
8
2
-
6
3
4
9
3
5
-
Linear Program
x2
x1+ x2 = 5.8
Feasible region
Minimize: x1+ x2
Subject to: 2x1 + x2 >= 5
x1 + 2x2 >= 6
x1 >= 0
x2 >= 0
x1
x1+ x 2 = 1
x1+ x2 = 3.67
The TSP Polytope:
Let x = (xij ) be a vector with an entry 1 indicating that
edge ij is included. Entry 0 indicates the edge is excluded.
Hence the vector has length equal to the number of edges.
Let xt be the vector corresponding to the tour t.
Polytope P = convex hull of {xt | t is a tour}
Interestingly, dim P = |E| - |V| = n(n-3)/2
(Where E is the set of edges and V is the set of vertices.)
Linear Programming formulation of the TSP:
Relaxation of the Linear Program:
Additional contraints:
Euclidean TSP:
The triangle inequality holds for the distance matrix.
For any three cities A, B, C,
AB + BC >= AC
(Note that the distance measure could be something other
than the Euclidean distance.)
For the Euclidean TSP, the tour does not cross itself.
The Euclidean TSP is still NP-Complete, but there are
approximation algorithms.
Edge Crossings in Geometric TSP
A
B
e
C
D
Ae + eB >= AB and Ce + eD >= CD
AD + CB >= AB + CD
Euclidean TSP on the unit cube
Minimum Spanning Tree:
Pick next smallest edge connected to partial tree
but not forming a cycle.
11
D
6
9
E
7
2
4
10
A
C
5
7
9
B
Minimum Spanning Tree Algorithm:
11
D
6
9
E
7
2
4
10
A
C
5
7
9
B
To form a TSP tour, trace the minimum spanning tree twice using short
cuts if possible. This gives A-E-B-C-D-A.
The cost of this tour is 31. The spanning tree has cost 19.
Euclidean Approximation Guarantee:
Let OPT = cost of optimal TSP tour.
MST = cost of minimum spanning tree.
RMT = cost of route derived from minimum spanning tree.
The optimal TSP tour minus the last edge is a
minimum spanning tree, so MST < OPT.
Then RMT <= 2*MST <= 2*OPT
With a little more care the shortcuts can be optimized to give:
RMT <= 1.5*OPT
Recently an algorithm scheme was discovered that gives
RMT <= (1+e)*OPT for arbitrary e > 0
Approximations for the General TSP:
Can an approximation algorithm find a tour that is, say, within 110%
of the optimal route?
For an approximation algorithm A and TSP instance I, let A(I) be the
cost of the tour it generates and let OPT(I) be the optimal cost.
Bottom line: No polynomial time algorithm A can guarantee that for
all instances I of TSP, A(I) < r OPT(I) for any constant r, unless P=NP.
Nevertheless, there are “rules” (called heuristics) that help
find good, if not optimal, TSP tours:
Nearest Neighbor
Dissection
Nearest Insertion
Tour Improvement
A
Search Tree
B
C
C
D
B
D
D
B
C
Little work
required.
D
C
D
B
C
Total nodes: 1+ (n-1) + (n-1)(n-2) + … + (n-1)!
(For 4 cities, there are 10 nodes.)
B
A
B
C
C
D
D
B
C
D
B
C
C
Branch and Bound techniques possibly reduce the number of
nodes visited.
Branch and Bound Technique
Add A to the possible list and assign arbitrary cost.
While the possible list is not empty do:
- Select node with smallest estimated cost and remove from list.
- Generate children of selected node and add to list.
- If children complete a tour, update optimal tour, otherwise
estimate cost of completed tour using this child.
- If estimated cost is greater than current optimal, remove node from list.
Estimate must be a lower bound on the cost and is called the
bounding function. Technique depends on how accurate estimate is.
A Possible Bounding Function B(i) :
Each node i in the search tree represents a partial tour. Those
cities not in the partial tour form a set of “remaining” cities.
C1 = cost of partial tour.
C2 = sum of the minimum edges into each remaining city.
B(i) = C1 + C2
B(i) <= Cost of any tour containing the partial route.
Mathais
Shortest Campus Tour: 1281 seconds
Herb ‘n Farm
Tutt Library
Cutler
Slocum
El Pomar
Armstrong
Elapsed time: 1.05 seconds
Total nodes visited: 710,050
Timing Results for Branch and Bound Algorithm
(Average of 3 Instances.)
Cities
Time (Sec)
Visited
Nodes
Total
Nodes
15
0.05
26,599
8.7x1010
20
0.33
188,360
1.2x1017
25
11.86
5,294,282
6.2x1023
17 City Admission Tour: 1.05 seconds
(710,050 nodes visited out of 2x1013)
Ant Colony Optimization
Ants find shortest path to food.
They deposit pheromone on trail.
Trails with most pheromone get most ants.
Basic searching behavior has random character.
Ant Colony Optimization Algorithm for TSP:
Place some ants at each city and iterate the following:
r
s
1. While at city i, an ant calculates a ij = cij / d ij where c ij
is the amount of pheromone and d ij is the distance
between i and j.
2. Each ant selects a city not already visited with probabilities
proportional to the aij .
3. After all ants have built a tour, evaporate some fraction
of the existing pheromone.
4. Each ant deposits an amount of pheromone inversely proportional
to the length of their tour.
Mathais
Ant Campus Tour: 1291 seconds
Herb ‘n Farm
Tutt Library
Cutler
Slocum
El Pomar
Armstrong
Elapsed time: 1.6 seconds
Ant Tours: 34,000
Line drawings with TSP routes: (Robert Bosch and Craig Kaplan)
References:
The Traveling Salesman Problem (1985)
- Lawler, Lenstra, Rinnoooy Kan, Shmoys
The Traveling Salesman Problem and its Variations (2002)
- Gutin, Punnen
The Traveling Salesman Problem: A Computational Study (2006)
- Applegate, Bixby, Chvatal, Cook
Dynamic Programming Algorithm:
A – BCD
A – BCD
A – BCD
A – BCD
A – BCD
A – BCD
EFG – A
EGF – A
FGE – A
FEG – A
GFE – A
GEF – A
FEG
Optimal
A – CBD FEG – A
g(i, S) = shortest path from i through vertices in S ending at A.
g(i, S) = min { c i,j + g(j, S - {j}) }
j in S
Optimal tour = g(A, {all vertices}-A)
Steps: n2 x 2n