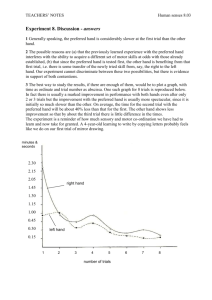
Supplementary Methods Stimuli and Experimental Procedures
advertisement

Supplementary Methods Stimuli and Experimental Procedures Subjects performed three tasks during which the following stimuli were displayed: (1) an exemplar of a specific car (Go) and an exemplar of a specific dog (NoGo) for the ‘Single Car’ task (SC); (2) 40 different exemplars of cars (Go) and 10 different exemplars of dogs (NoGo) for the ‘Multiple Cars’ task (MC); (3) 160 different exemplars of objects (Go) (including 40 food items, 40 cars, 20 clothing items, 20 kitchen items, 20 body parts, and 20 tools) and 40 different exemplars of animals of varying visual typicality (NoGo) for the ‘Object Animal’ task (OA). Also, to decrease chances of categorizing objects and animals simply based on perceptually salient features in each category, perceptual resemblance or distinctive features of each group were balanced. For example, some of the animal stimuli that we used have no legs (worm, butterfly, fish), whereas some of the objects have legs (chair, table, a pair of pants). The images are all line drawings from the standardized picture sets [1] and the Boston Naming Test [2], or were drawn by visual artists at the University of Texas at Dallas. Each task comprised 200 trials, 160 (80%) of which were ‘Go’ stimuli, which mandated a button press, and 40 (20%) were ‘NoGo’ stimuli, when responses should be withheld. Thus in the SC task, the picture of the car and that of the dog were presented (randomly admixed) for 160 and 40 times, respectively, while in the MC tasks, each of the 40 car pictures and the 10 dog pictures was shown 4 times over the course of the task. Finally, in the OA task, each of the 200 items was displayed only once. The instructions for the SC and MC tasks were the same as the following: “You are going to see some dogs and cars. When you see a dog, do not push the button. Press the button for anything that is not a dog. Be as quick and as accurate as possible”. The instruction for 1 the OA task was different: “You are going to see some objects and animals. When you see an animal, do not push the button. Press the button for anything that is not an animal. Be as quick and as accurate as possible”. Each subject performed all three tasks. The three tasks were performed in separate fMRI runs, each lasting for 7 minutes, with short breaks (1-3 minutes) between tasks, during which structural scans were acquired. The sequence of the stimuli in each task was pseudo-randomized and the order of the three tasks for each subject was counterbalanced to mitigate order effect related to practice and/or fatigue. Subjects viewed the images on a projected screen via a mirror affixed to the head coil at an angle of approximately 45 degrees. Each stimulus was presented for 300 ms followed by a 1700 ms fixation period (interstimulus interval, ISI) when a plus sign was presented in the center of the screen. We did not jitter ISIs as variable ISIs in the Go/NoGo task have been shown to alter performance and affect the establishment of the prepotent “go” response [3,4]. The paradigms were implemented in E-prime (Psychology Software Tools, Pittsburgh, PA, USA). Subjects were instructed both verbally and visually to respond as quickly and accurately as possible to Go stimuli by pushing a button under the index finger of their right hand and to withhold responses upon detecting NoGo stimuli. Image analysis Image analysis was performed using AFNI software [5]. All echo planar imaging (EPI) scans were slice-time and motion corrected. A motion plot was generated for each scanning session in which six parameters of rotation and translation could be visually inspected. Sessions with motion greater than 3 mm in transition or 2o in rotation were excluded from further analysis 2 (N=3, who were not included in the 16 subjects that we analyzed). The BOLD data for each voxel for each run (task) were then scaled so that the regression parameter estimates would be expressed in terms of percent signal-change (i.e., 100 *yt/My, yt = BOLD signal at time t, My = mean of the time-series). Spatial smoothing was performed on EPI scans with a Gaussian smoothing kernel (FWHM=6 mm). The event-related BOLD signal changes were processed using a conventional, modified linear regression for fMRI. Regressors were constructed by convolving a hemodynamic response function (HRF; a gamma-variate function with parameters b = 8.6, c = 0.547; maximal amplitude = 1.0; [6]) with impulse functions at the onsets of correct Go and correct NoGo trials. Because response inhibition and selection in Go/NoGo tasks has been affected by variable ISIs or SOAs [3,4], we used fixed ISIs in the present study. However, temporal variability in ITIs or stimulus onsets asynchrony (SOAs) substantially increases power in estimating fMRI event-related signals [7,8], and temporal regularity in ITIs can lead to extreme collinearity, and possibly singularity, between canonical-based fMRI Go and NoGo regressor models to the point where linear regression is not accurate and in the case of singularity where it is computationally impossible. In order to optimize BOLD signal processing and reduce this potential issue of collinearity, we constructed three regressors for each individual, among which are correct NoGo trials (‘canonical NoGo regressor’), randomly selected correct Go trials equivalent in number to the correct NoGo trials (‘canonical Go regressor’), and the rest of the correct Go trials (‘RT modulated Go regressor’). For example, if a subject had 35 correct NoGo trials (out of the total 40 NoGos) and 155 correct Go trials (out of the total 160 Gos), canonical Go regressor would have 35 randomly selected correct Gos from the pool of 155, and the RT modulated Go regressor 3 would have the rest 120 Gos that were not selected. The difference between canonical and RT modulated Go regressors was that for RT modulated Go regressor, both amplitude and duration of the impulse functions were modulated parametrically in proportion to the RT in each trial [9]. The cost of using RT modulated Go regressor, however, was that the parameter estimates obtained via GLM were in different metrics from those of canonical NoGo regressor and thus the estimates were not comparable. On the other hand, the canonical Go regressor was modeled in the same way, with an equal number of trials, as the canonical NoGo regressor, which renders a valid base for comparing Go and NoGo signals. Therefore, we only report results of canonical Go regressor which could also be used to explore Go-NoGo differences. In addition to the three regressors probing the experimental Go and NoGo effects (canonical and RT modulated Go regressor and canonical NoGo regressor), we also established regressors for all incorrect trials, which reduced residuals caused by error trials, six regressors for motion correction parameters, and three for linear, quadratic, and cubic trends, respectively, which diminished the temporal effect of motion-related low-frequency signal variation. We did not directly model the baseline in the GLM. BOLD times series was previously scaled and converted to percent-signal change and in the GLM, the BOLD time-series at subject level was then estimated using regressors specified in the design matrix (y = bx + e; y : BOLD signal time-series; b : estimate coefficient; x : modeled values from a regressor; e : residual). The baseline was implicit and represented 0 % signal-change during the non-event periods covering all fixation periods when there was no task-related activation. This implicit 0 % signal-change baseline was then taken as having a value of zero at group level analysis. Using implicit baseline gave us a continuous estimation of the tonic activity across the entire task, which is one of the common 4 practices in analyzing Go/NoGo task effects [10-13]. Each subject’s own T1-weighted anatomical scans were normalized first via a 6-parameter affine transformation and then a nonlinear transformation algorithm to fit them to a Talairach-Tournoux template (with FSL functions, [14]). The functional parameter estimate maps (generated from the EPI images) were then normalized to the same Talariach template based on the transformation parameters of T1weighted image. To make the randomly selected Go trials more representative of Go trials as a whole, particularly in the OA task which has 6 different categories of objects (food items, cars, clothing items, kitchen items, body parts, and tools), the number of randomly selected Go trials for each category was in proportional to the total number of exemplars in each category. We defined correct Go trials as those with an RT within 2.5 standard deviations of the mean RT in each subject. Trials with RTs beyond this range were taken as outliers and grouped with incorrect trials. To examine the consistency of the analysis and to minimize the effects of random selections of subsets of Go trials for Go regressors, we followed the same steps and did 3 parallel analyses, each of which had its own unique randomized sets of Go trials for Go regressors for each subject. We then compared the results of the group-level analysis across these 3 versions. We took the most conservative approach and reported only F effects that were found consistently across all analyses in order to avoid potential type I errors. The spatially normalized beta matrices were then used for voxel-wise 2 factorial repeatedmeasures ANOVAs (3dANOVA3 in AFNI; with subject as a random factor and task and condition as fixed within-subject factors; two levels of response condition: Go/NoGo; three 5 levels of categorization task: SC/MC/OA). We also did voxel-wise one-sample t-tests for Go and NoGo conditions against baseline in all three tasks. All effects were thresholded cluster-wise at 90 voxels (after 1000 Monte Carlo simulations in the AlphaSim software; [15]), correcting for a family-wise error at cluster-level of p = 0.05 and voxel-level of p = 0.005, with a smoothing kernel of FWHM = 6 mm. Even at this stringent threshold, some significant clusters still spanned across a wide range of areas (such as across lobes or hemispheres) which led to underrepresentation of anatomical localization when reporting only peak voxels of local maxima. Therefore, when encountering this situation, we manually increased the threshold at a step-wise approach to further separate the foci of maximal signal change, and reported these foci as well. Post-hoc follow-up tests to characterize the direction of main and interaction effects and significance against baseline were restricted to peak voxels of the clusters that were found to be significant in the ANOVA. To test for the presence of activation within a condition, one-sample t-tests were calculated to compare the mean to zero (i.e., the implicit baseline of no-activation, or baseline of 0 % signal change). 6 Supplementary Reference: 1. Snodgrass JG, Vanderwart M. A standardized set of 260 pictures: norms for name agreement, image agreement, familiarity, and visual complexity. J Exp Psychol Hum Learn 1980; 6: 174215. 2. Kaplan EF, Goodglass H, Weintraub S. The Boston naming . Philadelphia: Lippincott Williams & Wilkins; 1983. 3. Wodka EL, Simmonds DJ, Mahone EM, Mostofsky SH. Moderate variability in stimulus presentation improves motor response control. J Clin Exp Neuropsychol 2009; 31: 483-488. 4. Ryan M, Martin R, Denckla MB, Mostofsky SH, Mahone EM. Interstimulus jitter facilitates response control in children with ADHD. J Int Neuropsychol Soc 2010; 16: 388-393. 5. Cox RW. AFNI: software for analysis and visualization of functional magnetic resonance neuroimages. Comput Biomed Res 1996; 29: 162-173. 6. Cohen MS. Parametric analysis of fMRI data using linear systems methods. Neuroimage 1997; 6: 93-103. 7. Dale AM, Buckner RL. Selective averaging of rapidly presented individual trials using fMRI. Hum Brain Mapp 1997; 5: 329-340. 8. Dale AM. Optimal experimental design for event-related fMRI. Hum Brain Mapp 1999; 8: 109-114. 9. Grinband J, Wager TD, Lindquist M, Ferrera VP, Hirsch J. Detection of time-varying signals in event-related fMRI designs. Neuroimage 2008; 43: 509-520. 10. Garavan, H, Ross, TJ, & Stein, EA (1999). Right hemispheric dominance of inhibitory control: an event-related functional MRI study. Proc Natl Acad Sci U S A, 96(14), 8301-8306. 7 11. Kauffman, JN, Ross, TJ, Stein, EA, Garavan, H. (2003). Cingulate Hypoactivity in Cocaine Users During a GO–NOGO Task as Revealed by Event-Related Functional Magnetic Resonance Imaging. The Journal of Neuroscience 23(21):7839-7843. 12. Mostofsky, SH; Schafer, JGB; Abrams, MT; et al. (2003). fMRI evidence that the neural basis of response inhibition is task-dependent. Cognitive Brain Research, 17, 419-430. 13. Suskauer, SJ; Simmonds, DJ; Fotedar, S; et al. (2008). Functional Magnetic Resonance Imaging Evidence for Abnormalities in Response Selection in Attention Deficit Hyperactivity Disorder: Differences in Activation Associated with Response Inhibition but Not Habitual Motor Response. Journal of Cognitive Neurosience, 20(3), 478-493. 14. Smith SM, Jenkinson M, Woolrich MW, Beckmann CF, Behrens TEJ, Johansen-Berg H, et al. Advances in functional and structural MR image analysis and implementation as FSL. Neuroimage 2004; 23: S208-S219. 15. Ward B. Simultaneous inference for FMRI data. [http://afni.nimh.nih.gov/afni/doc/ manual/AlphaSim] 2000. 8