BMT437-INTRODUCTION TO CONTROL SYSTEMS Edited
advertisement

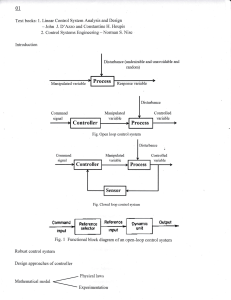
Introduction to Control Systems: Regulation and Control System CONTENTS Basic Concepts Control System Examples Control System Design January 11, 2005 WHAT DO THESE TWO HAVE IN COMMON? Tornado Boeing 777 • Highly nonlinear, complicated dynamics! • Both are capable of transporting goods and people over long distances BUT • One is controlled, and the other is not. • Control is “the hidden technology that you meet every day” • It heavily relies on the notion of “feedback” 3 DEFINITIONS Control systems are an integral component of any industrial society and are necessary to provide useful economic products for society. Control engineering is based on the foundation of feedback theory and linear system analysis, and integrates the concepts of network theory and communication theory. Therefore, control engineering is not limited to any engineering discipline but is equally applicable for aeronautical, chemical, mechanical, environmental, civil, and electrical engineering. For example, quite often a control system includes electrical, mechanical, and chemical components. BASIC CONCEPTS System Dynamic System A collection of components which are coordinated together to perform a function. A system with a memory. For example, the input value at time t will influence the output at future instant. A system interact with their environment through a controlled boundary. BASIC CONCEPTS The interaction is defined in terms of variables. i. ii. iii. System input System output Environmental disturbances SYSTEM VARIABLES The system’s boundary depends upon the defined objective function of the system. The system’s function is expressed in terms of measured output variables. The system’s operation is manipulated through control input variables. The system’s operation is also affected in an uncontrolled manner through disturbance input variables. CONTROL SYSTEM Control is the process of causing a system variable to conform to some desired value. Manual control Automatic control (involving machines only). A control system is an interconnection of components forming a system configuration that will provide a desired system response. Input Signal Control System Energy Source Output Signal MANUAL VS AUTOMATIC CONTROL Control is a process of causing a system variable such as temperature or position to conform to some desired value or trajectory, called reference value or trajectory. For example, driving a car implies controlling the vehicle to follow the desired path to arrive safely at a planned destination. i. If you are driving the car yourself, you are performing manual control of the car. ii. If you use design a machine, or use a computer to do it, then you have built an automatic control system. RESPONSE CHARACTERISTICS Transient response: Steady-state response: Gradual change of output from initial to the desired condition Approximation to the desired response For example, consider an elevator rising from ground to the 4th floor. BLOCK DIAGRAM Component or process to be controlled can be represented by a block diagram. The input-output relationship represents the cause and effect of the process. Input Process Output Control systems can be classified into two categories: i. Open-loop control system ii. Closed-loop feedback control system CONTROL SYSTEM CLASSIFICATION An open-loop control system utilizes an actuating device to control the process directly without using feedback. Desired Output Response Actuating Device Process Output A closed-loop feedback control system uses a measurement of the output and feedback of the output signal to compare it with the desired output or reference. Desired Output Response Comparison Controller Process Measurement Single Input Single Output (SISO) System Output CONTROL SYSTEM CLASSIFICATION Missile Launcher System Open-Loop Control System CONTROL SYSTEM CLASSIFICATION Missile Launcher System Closed-Loop Feedback Control System CONTROL SYSTEM CLASSIFICATION Desired Output Response Controller Process Measurement Multi Input Multi Output (MIMO) System Output Variables CONT..... Static or Dynamic Systems: Static systems are composed of simple linear gains or nonlinear devices and described by algebraic equations, and dynamic systems are described by differential or difference equations. Continuous-time or Discrete-time Systems: Continuous-time dynamic systems are described by differential equations and discrete-time dynamic systems by difference equations. PURPOSE OF CONTROL SYSTEMS i. Power Amplification (Gain) ii. Remote Control iii. Robotic arm used to pick up radioactive materials Convenience of Input Form iv. Positioning of a large radar antenna by low-power rotation of a knob Changing room temperature by thermostat position Compensation for Disturbances Controlling antenna position in the presence of large wind disturbance torque HISTORICAL DEVELOPMENTS i. Ancient Greece (1 to 300 BC) ii. Cornellis Drebbel (17th century) iii. Temperature control James Watt (18th century) iv. Water float regulation, water clock, automatic oil lamp Flyball governor Late 19th to mid 20th century Modern control theory WATT’S FLYBALL GOVERNOR HUMAN SYSTEM i. Pancreas ii. Regulates blood glucose level Adrenaline Automatically generated to increase the heart rate and oxygen in times of flight iii. Eye iv. Follow moving object Hand Pick up an object and place it at a predetermined location v. Temperature Regulated temperature of 36°C to 37°C TEMPERATURE CONTROL Figure shows a schematic diagram of temperature control of an electric furnace. The temperature in the electric furnace is measured by a thermometer, which is analog device. The analog temperature is converted to a digital temperature by an A/D converter. The digital temperature is fed to a controller through an interface. This digital temperature is compared with the programmed input temperature, and if there is any error , the controller sends out a signal to the heater, through an interface, amplifier and relay to bring the furnace temperature to a desired value. TRANSPORTATION Car and Driver Objective: To control direction and speed of car Outputs: Actual direction and speed of car Control inputs: Road markings and speed signs Disturbances: Road surface and grade, wind, obstacles Possible subsystems: The car alone, power steering system, breaking system TRANSPORTATION Functional block diagram: Desired course of travel + Error - Driver Steering Mechanism Automobile Measurement, visual and tactile Time response: Actual course of travel TRANSPORTATION Consider using a radar to measure distance and velocity to autonomously maintain distance between vehicles. Automotive: Engine regulation, active suspension, anti-lock breaking system (ABS) Steering of missiles, planes, aircraft and ships at sear. PROCESS INDUSTRY Control used to regulate level, pressure and pressure of refinery vessel. Coordinated control system for a boilergenerator. For steel rolling mills, the position of rolls is controlled by the thickness of the steel coming off the finishing line. MANUFACTURING INDUSTRY Consider a three-axis control system for inspecting individual semiconducting wafers with a highly sensitive camera HOMES i. CD Players ii. The position of the laser spot in relation to the microscopic pits in a CD is controlled. Air-Conditioning System Uses thermostat and controls room temperature. CONTROL SYSTEM COMPONENTS i. System, plant or process ii. Actuators iii. Converts the control signal to a power signal Sensors iv. To be controlled Provides measurement of the system output Reference input Represents the desired output GENERAL CONTROL SYSTEM Disturbance Set-point or Reference input + Controlled Signal Error - + Controller Feedback Signal Manipulated Variable Actuator Sensor + + + Process Actual Output January 11, 2005 MODERN ENGINEERING APPLICATIONS OF CONTROL Flight Control Systems Modern commercial and military aircraft are “fly by wire” Autoland systems, unmanned aerial vehicles (UAVs) are already in place Robotics High accuracy positioning for flexible manufacturing Remote environments: space, sea, non-invasive surgery, etc. Chemical Process Control Regulation of flow rates, temperature, concentrations, etc. Long time scales, but only crude models of process Communications and Networks Amplifiers and repeaters Congestion control of the Internet Power management for wireless communications Automotive Engine control, transmission control, cruise control, climate control, etc Luxury sedans: 12 control devices in 1976, 42 in 1988, 67 30 “The right half of the brain controls the left half of the body. This means that only left handed people are in their right mind…” THE END…