Brian Choi, Emmanuel Peters, Shou-pon Lin
E6778
March 7, 2012
Outline
Brief summary of project
Updated timeline
Completed tasks
Implemented updated merge protocol in simulator with
velocity matching
Results of baseline
Observations which justifies development of extended
protocol
Developed projection-based proactive merge protocol
Future tasks
Progress evaluation
Project Goals
Test the safe driver assisted merge protocol in a
software environment to measure improvements in
average vehicle throughput and average merge speed
as a function of participation rate.
Validate the protocol by also testing against the
failures initially presented last year.
Expand the safe driver assisted merge protocol by
introducing proactive merging techniques
Updated Timeline
Incorporate Protocol into Model (2/83/6)
1.
1.
2.
3.
Establish programmable parameters
from SDAM protocol (2/8-2/15)
Reproduce protocol in software model
(2/15-2/25)
Incorporate failure modes into model
(2/25-3/7)
Run Simulations (3/7-4/4)
2.
1.
2.
3.
1.
2.
3.
2.
Run Simulations (3/7-4/4)
2.
Introduce variability of traffic
simulation (3/7-3/14)
Evaluate performance (3/14-4/4)
Code Debugging (3/14-4/4)
Report (4/4-4/11)
Presentation (4/11-4/18)
Refine merge protocol for utilization in
traffic simulator (2/8-2/15)
Projection based proactive merging
protocol (2/15-2/25)
Add protocols to traffic simulator
(2/25-3/7)
1.
1.
2.
3.
Summarize Results (4/4-4/18)
3.
Incorporate Protocol into Model (2/83/6)
1.
4.
Run Baseline Simulations (3/7-3/14)
Run Updated Protocol Simulations
(3/14-4/4)
Compare Results (3/28-4/4)
Code Debugging (3/14-4/4)
Summarize Results (4/4-4/18)
3.
1.
2.
Report (4/4-4/11)
Presentation (4/11-4/18)
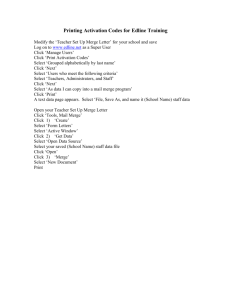
Basic Merge Protocol
• Car on highway breaks suddenly to create room for merging
car
• Other cars are forced to break suddenly also
Updated Merging Protocol
Instead of initiate merging protocol whenever a
vehicle comes up of the ramp, we restrict that when
initiating of merging protocol, the merging car should
travel within a certain range of neighboring vehicle
Limit the amount of deceleration of back car
The merging car cannot travel at a speed that is too
low
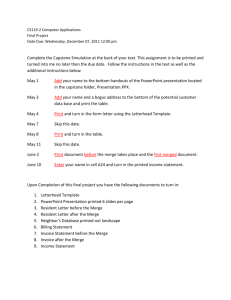
Baseline Results
Baseline Results
Performance in terms of delay
Average Throughput
The Need of Extended Protocol
Finding the participating vehicles by projecting the
future positions of vehicles on the main road
Match the speed from the start of the ramp, instead of
passively traveling on the ramp until the speeds of
involved vehicles are matched
Creating the gap before the merging point is reached
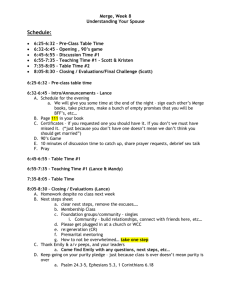
Projection based proactive merging protocol
IDM Cruise
Control
Car on ramp NOT
participating in merge
Wait
Incr. Safety
Spacing
Wait Timer
expires
Car leaves
ramp
No neighbors
found
Poll Road
Velocity,
Positions of
neighbors
Abort Merge
Protocol
No suitable neighbors
found in X trials
No suitable neighbors.
No. of Trials <X
Neighbors
found
Unexpected event:
Sudden breaking,
etc.
Project
Positions
Select
Neighbors
for Merge
Accelerate
Achieve Target
Velocity
Merge
Maneuver
Merge
Completed
IDM Cruise
Control
Future Tasks
Implement Projection-based proactive merging
protocol in the simulator
Introduce failure model in the simulator
Simulations with the extended protocol
Results analysis
Progress Evaluation
#
1
1.1
1.2
1.3
Tasks
Incorporate Protocol into Model
Safe driver assisted merge protocol
Refine merge protocol for utilization in traffic simulator
Projection based proactive merging protocol
Define protocol functions and states to be used in simulator
Traffic Simulator
Implement protocols in the traffic simulator
Start
Finish
2/8/2012
3/6/2012
2/8/2012 2/15/2012
2/15/2012 2/25/2012
2/25/2012
3/7/2012
2
2.1
Run Simulations
Run Baseline Simulations
2.2
2.3
2.4
Participation Rate
Run Projection based proactive merging protocol Simulations
Compare Results
Code Debugging
3/14/2012 3/28/2012
3/28/2012
4/4/2012
3/14/2012
4/4/2012
3
3.1
3.2
Summarize Results
Report
Presentation
4/4/2012 4/18/2012
4/4/2012 4/11/2012
4/11/2012 4/18/2012
Completed Tasks
Task in Progress
Task not Started
3/7/2012
4/4/2012
3/7/2012 3/14/2012
 0
0