Computer Architecture Instruction Set Architecture
advertisement

Computer Architecture
Chapter 5
Fall 2005
Department of Computer Science
Kent State University
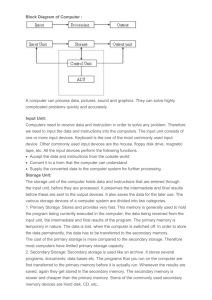
The Processor: Datapath & Control
• Our implementation of the MIPS is simplified
– memory-reference instructions: lw, sw
– arithmetic-logical instructions: add, sub, and, or, slt
– control flow instructions: beq, j
• Generic implementation
– use the program counter (PC) to supply
the instruction address and fetch the
instruction from memory (and update the PC)
– decode the instruction (and read registers)
– execute the instruction
Fetch
PC = PC+4
Exec
Decode
• All instructions (except j) use the ALU after reading the
registers
How? memory-reference? arithmetic? control flow?
Abstract / Simplified View
4
Add
Add
Data
PC
Address Instruction
Instruction
memory
Register #
Registers
Register #
ALU
Address
Data
memory
Register #
Data
• Two types of functional units:
– elements that operate on data values (combinational)
– elements that contain state (sequential)
More Implementation Details
Fetching Instructions
• Fetching instructions involves
– reading the instruction from the Instruction Memory
– updating the PC to hold the address of the next instruction
Add
4
Instruction
Memory
PC
Read
Address
Instruction
– PC is updated every cycle, so it does not need an explicit write
control signal
– Instruction Memory is read every cycle, so it doesn’t need an
explicit read control signal
Fetch-Decode-Execute
• In order to execute an instruction we must
– Fetch the instruction from memory
– Determine what the instruction is (decode)
– Execute it
• Fetch and decode are the same for all
instructions
• Execute depends on the type of instruction
Instruction Formats
op
rs
rt
rd
shamt
funct
31:26
25:21
20:16
15:11
10:6
5:0
op
rs
rt
immed
31:26
25:21
20:16
15:0
op
addr
31:26
25:0
Decoding Instructions
• Decoding instructions involves
– sending the fetched instruction’s opcode and function
field bits to the control unit
Control
Unit
Read Addr 1
Instruction
Register Read
Read Addr 2 Data 1
File
Write Addr
Read
Write Data
Data 2
– reading two values from the Register File
• Register File addresses are contained in the instruction
Executing Load and Store
• Load
–
–
–
–
Fetch operand (base address) from register
Compute effective address
Read data from memory
Write result back to register
• Store
– Fetch operands from registers
– Compute effective address
– Write data to memory
Executing Arithmetic/Logic
• Arithmetic/logic (add, sub, and, or, slt)
– Fetch operands from registers
– Perform operation
– Write result back to register
Executing Branch and Jump
• Conditional branch (beq)
– Fetch operands from registers
– Compare operands
– If equal add displacement to PC
• Jump (j)
– Write new value to PC
ALU Instructions
• Components
– Register File
– ALU
• Operation
– Use instruction fields to select registers
– Read source registers and send them to ALU
– Send ALU result to destination register
Components for ALU Instrs
5
Register
numbers
5
5
Data
3
Read
register 1
Read
register 2
Registers
Write
register
Write
data
ALU control
Read
data 1
Data
Zero
ALU ALU
result
Read
data 2
RegWrite
a. Registers
b. ALU
ALU Datapath
3
Read
register 1
Instruction
Read
register 2
Registers
Write
register
Write
data
ALU operation
Read
data 1
Zero
ALU ALU
result
Read
data 2
RegWrite
Memory Access
• Components
–
–
–
–
Register File
ALU
Data Memory
Sign-Extension Unit
• Operation
– ALU adds base register and sign-extended immediate
– Send ALU result to memory as the address
– Read the value from memory into the destination
register (lw) or write the value from the source register
into memory (sw)
Components for Mem Access
MemWrite
Address
Write
data
Read
data
Data
memory
16
Sign
extend
32
MemRead
a. Data memory unit
b. Sign-extension unit
Memory Access Datapath
3
Read
register 1
Instruction
Read
register 2
Registers
Write
register
Write
data
ALU operation
MemWrite
Read
data 1
Zero
ALU ALU
result
Address
Read
data 2
Write
data
RegWrite
16
Sign
extend
32
Read
data
Data
memory
MemRead
Branches
• Components
–
–
–
–
–
Register File
ALU
Program Counter (PC)
Adder
Sign-Extension Unit
• Operation
– Send source register values to ALU for comparison
– Adder computes branch target address
– Control logic decides whether branch is taken or not
Branch Datapath
PC + 4 from instruction datapath
Add Sum
Branch target
Shift
left 2
Instruction
3
Read
register 1
Read
register 2
Registers
Write
register
Write
data
Read
data 1
ALU Zero
Read
data 2
RegWrite
16
ALU operation
Sign
extend
32
To branch
control logic
Putting It All Together
PCSrc
Add
ALU
Add result
4
Shift
left 2
RegWrite
Instruction [25– 21]
PC
Read
address
Instruction
[31– 0]
Instruction
memory
Instruction [20– 16]
1
M
u
Instruction [15– 11] x
0
RegDst
Instruction [15– 0]
Read
register 1
Read
register 2
Read
data 1
MemWrite
ALUSrc
Read
Write
data 2
register
Write
Registers
data
16
Sign
extend
1
M
u
x
0
1
M
u
x
0
Zero
ALU ALU
result
MemtoReg
Address
Write
data
32
ALU
control
Instruction [5– 0]
ALUOp
Read
data
Data
memory
MemRead
1
M
u
x
0
Control Unit
• Control unit takes an instruction as input
and produces control signals as output
• Types of control signals
– Multiplexor selector signals
– Write enables for state elements
– Control signals for other blocks (ALU, etc.)
• In a single-cycle datapath the control unit is
simple, just look up instruction in a table
Control Signals
• RegDst: Selects either rd or rt as the destination
register
• RegWrite: The value on the write data port will be
written into the register specified by the write
register input when asserted
• ALUOp: Selects ALU operation
• ALUSrc: Selects the second ALU input to be either
the second register output or the sign-extended
immediate value
Control Signals (cont'd)
• PCSrc: Selects new PC as either PC + 4 or the
output of the branch target adder
– This signal is derived from the Branch control signal
and the ALU's Zero output
• MemRead/MemWrite: Causes data memory to
perform a read/write operation when asserted
• MemToReg: Selects either the ALU output or the
data memory output as the data input into the
register file
ALU Control
• In order to simplify design of the control
unit we give the ALU its own control logic
• The ALU control block takes a 2-bit input
from the control unit (ALUOp) and the funct
field from the instruction and produces the
ALU control signals
ALU Control Signals
Instruction
ALUOp
lw
funct Field
ALU Function
ALU Inputs
00
Add
0010
sw
00
Add
0010
beq
01
Subtract
0110
add
10
100000
Add
0010
sub
10
100010
Subtract
0110
and
10
100100
AND
0000
or
10
100101
OR
0001
slt
10
101010
Set on less than
0111
Operation of Control Unit
ALU
lw
sw
beq
ALUOp
10
00
00
01
ALUSrc
0
1
1
0
Branch
0
0
0
1
MemRead
0
1
0
0
MemWrite
0
0
1
0
MemToReg
0
1
x
x
RegDst
1
0
x
x
RegWrite
1
1
0
0
Datapath with Control Unit
0
M
u
x
ALU
Add result
Add
4
Instruction [31 26]
Control
Instruction [25 21]
PC
Read
address
Instruction
memory
Instruction [15 11]
Shift
left 2
RegDst
Branch
MemRead
MemtoReg
ALUOp
MemWrite
ALUSrc
RegWrite
PCSrc
Read
register 1
Instruction [20 16]
Instruction
[31– 0]
1
0
M
u
x
1
Read
data 1
Read
register 2
Registers Read
Write
data 2
register
0
M
u
x
1
Write
data
Zero
ALU ALU
result
Address
Write
data
Instruction [15 0]
16
Instruction [5 0]
Sign
extend
32
ALU
control
Read
data
Data
memory
1
M
u
x
0
Jump Instructions
• The unconditional branch instruction (j)
computes its branch target differently from
the conditional branch instruction (beq)
• Branch target address is:
– Top 4 bits of PC + 4
– 26-bit immediate value
– Two zero bits
Datapath with Jump
Instruction [25– 0]
26
Shift
left 2
Jump address [31– 0]
28
0
1
M
u
x
M
u
x
ALU
Add result
1
0
Zero
ALU ALU
result
Address
PC+4 [31– 28]
Add
4
Instruction [31– 26]
Control
Instruction [25– 21]
PC
Read
address
Instruction
memory
Read
register 1
Instruction [20– 16]
Instruction
[31– 0]
Instruction [15– 11]
Shift
left 2
RegDst
Jump
Branch
MemRead
MemtoReg
ALUOp
MemWrite
ALUSrc
RegWrite
0
M
u
x
1
Read
data 1
Read
register 2
Registers Read
Write
data 2
register
0
M
u
x
1
Write
data
Write
data
Instruction [15– 0]
16
Instruction [5– 0]
Sign
extend
32
ALU
control
Read
data
Data
memory
1
M
u
x
0
Performance
• The single-cycle datapath executes each
instruction in just one cycle
• CPI is 1.0, which is optimal
• However, minimum clock cycle time is
determined by slowest instruction
• In practice the execution time can vary
considerably between instructions making a
single-cycle implementation a poor choice
Using Multiple Cycles
• A multi-cycle datapath splits instruction execution
into multiple steps, where each step take one cycle
• If an instruction doesn't need a step it skips it, so
different instructions run for different numbers of
cycles
• Slow instructions don't slow down the entire
processor
• Control unit becomes more complicated
• Hardware can be shared between steps
Multicycle Datapath (1)
Instruction
register
PC
Address
Data
A
Register #
Instruction
Memory
or data
Data
Memory
data
register
ALU
Registers
Register #
B
Register #
ALUOut
Multicycle Differences
• A functional unit can be used more than
once in the execution of an instruction, so
long as those uses occur in different steps
– Instruction memory and data memory are
combined into a single unit
– ALU takes over for the two separate adders
• Additional registers are needed to save
information between steps
Multicycle Registers
• Instruction register (IR): hold the instruction
during its execution
• Memory data register (MDR): hold the data
read from memory for one cycle
• A: hold source register for one cycle
• B: hold source register for one cycle
• ALUOut: hold ALU output for one cycle
Multicycle Datapath (2)
PC
0
M
u
x
1
Address
Memory
MemData
Write
data
Instruction
[25– 21]
Read
register 1
Instruction
[20– 16]
Read
Read
data
1
register 2
Registers
Write
Read
register data 2
0
Instruction
M
[15– 0] Instruction u
[15– 11] x
Instruction
1
register
Instruction
[15– 0]
Memory
data
register
A
B
4
Write
data
0
M
u
x
1
16
Sign
extend
0
M
u
x
1
32
Shift
left 2
0
1M
u
2 x
3
Zero
ALU ALU
result
ALUOut
Multicycle Datapath (3)
IorD
PC
0
M
u
x
1
MemRead MemWrite
RegDst
RegWrite
Instruction
[25– 21]
Address
Memory
MemData
Write
data
IRWrite
Instruction
register
Instruction
[15– 0]
Memory
data
register
0
M
u
x
1
Read
register 1
Read
Read
data 1
register 2
Registers
Write
Read
register data 2
Instruction
[20– 16]
Instruction
[15– 0]
ALUSrcA
0
M
Instruction u
x
[15– 11]
1
A
B
4
Write
data
0
M
u
x
1
16
Sign
extend
32
Shift
left 2
Zero
ALU ALU
result
0
1 M
u
2 x
3
ALU
control
Instruction [5– 0]
MemtoReg
ALUSrcB ALUOp
ALUOut
New Control Signals
• ALUSrcA: selects first ALU operand to be either
the PC or the A register
• ALUSrcB: selects second ALU operand from: B
register, constant 4, sign-extended immediate,
sign-extended and shifted immediate
• MemtoReg: selects register file write data as
coming from either ALUOut or MDR
• IorD: selects the memory address as coming from
either PC or ALUOut
New Control Signals (cont'd)
• IRWrite: If asserted the memory output is
written to IR
• PCSource: Selects the new value for the PC
from: ALU, ALUOut, jump target address
• PCWrite: If asserted the PC is written
• PCWriteCond: If asserted and the zero
output from the ALU is 1 then the PC is
written
Instruction Execution Steps
• Instruction fetch
• Instruction decode and register fetch
• Execution, memory address computation, or
branch completion
• Memory access or R-type completion
• Memory read completion
Instruction Fetch
• Fetch instruction from memory
– IR ← Memory[PC]
• Increment the PC
– PC ← PC + 4
Instruction Decode
• Fetch operands from register file
– A ← Reg[IR[25:21]]
– B ← Reg[IR[20:16]]
• Compute branch target address
– ALUOut ← PC + (sign-extend(IR[15:0]) << 2)
Execute
• Load/store: Compute memory address
– ALUOut ← A + sign-extend(IR[15:0])
• R-type: Perform operation specified by instruction
– ALUOut ← A op B
• Branch: Compare registers and set PC if equal
– if (A == B) PC ← ALUOut
• Jump: Set PC to jump target address
– PC ← {PC[31:28], (IR[25:0] << 2)}
Memory Access
• Load: Read memory word into MDR
– MDR ← Memory[ALUOut]
• Store: Write B into memory
– Memory[ALUOut] ← B
• R-type: Write result to destination register
– Reg[IR[15:11]] ← ALUOut
Memory Read Completion
• Load: Write result to destination register
– Reg[IR[20:16]] ← MDR
Multicycle Datapath (4)
PCWriteCond
PCSource
PCWrite
ALUOp
IorD Outputs
ALUSrcB
MemRead
ALUSrcA
MemWrite Control
RegWrite
MemtoReg
Op
RegDst
IRWrite
[5– 0]
0
M
26
Instruction [25– 0]
PC
0
M
u
x
1
Shift
left 2
Instruction
[31-26]
Address
Memory
MemData
Write
data
Instruction
[25– 21]
Read
register 1
Instruction
[20– 16]
Read
Read
register 2 data 1
Registers
Write
Read
register data 2
Instruction
[15– 0]
Instruction
register
Instruction
[15– 0]
Memory
data
register
0
M
Instruction u
x
[15– 11]
1
B
4
Write
data
0
M
u
x
1
16
Sign
extend
32
Instruction [5– 0]
Shift
left 2
Jump
address [31-0]
Zero
ALU ALU
result
0
1 M
u
2 x
3
ALU
control
1 u
x
2
PC [31-28]
0
M
u
x
1
A
28
ALUOut
State Machine
• A state machine is a sequential logic device with:
– Set of states
– Next-state function which determines the next state
from the current state and the inputs
– Output function which determines the outputs from the
current state and possibly the inputs
• In a Moore machine the output depends only on
the state; in a Mealy machine the output depends
on the state and the inputs
Control with a State Machine
• The control unit for our multicycle datapath
will be a state machine
• The only input is the op field of the
instruction; the outputs are the control
signals
• Each step may have multiple states if
control signals depend on the instruction
Fetch and Decode States
Instruction decode/
Register fetch
Instruction fetch
'LW
Memory reference FSM
(Figure 5.38)
R-type FSM
(Figure 5.39)
EQ
')
'B
p=
(O
)
ype
t
R
=
W ')
ALUSrcA = 0
ALUSrcB = 11
ALUOp = 00
Branch FSM
(Figure 5.40)
(Op = 'JMP')
=
(Op
'S
p=
O
(
') or
1
p
Start
MemRead
ALUSrcA = 0
IorD = 0
IRWrite
ALUSrcB = 01
ALUOp = 00
PCWrite
PCSource = 00
(O
0
Jump FSM
(Figure 5.41)
Load and Store States
From state 1
(Op = 'LW') or (Op = 'SW')
Memory address computation
2
(O
p
=
'S
')
W
(Op = 'LW')
ALUSrcA = 1
ALUSrcB = 10
ALUOp = 00
Memory
access
Memory
access
5
3
MemRead
IorD = 1
MemWrite
IorD = 1
Write-back step
4
RegWrite
MemtoReg = 1
RegDst = 0
To state 0
(Figure 5.37)
R-Type States
From state 1
(Op = R-type)
Execution
6
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 10
R-type completion
7
RegDst = 1
RegWrite
MemtoReg = 0
To state 0
(Figure 5.37)
Branch State
From state 1
(Op = 'BEQ')
Branch completion
8
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 01
PCWriteCond
PCSource = 01
To state 0
(Figure 5.37)
Jump State
From state 1
(Op = 'J')
Jump completion
9
PCWrite
PCSource = 10
To state 0
(Figure 5.37)
Complete State Machine
Instruction decode/
register fetch
Instruction fetch
(Op
2
W
= 'L
(Op
') or
= 'S
6
Branch
completion
p
=
'S
')
W
5
MemRead
IorD = 1
Write-back step
4
RegDst = 0
RegWrite
MemtoReg = 1
R-type completion
7
MemWrite
IorD = 1
RegDst = 1
RegWrite
MemtoReg = 0
Jump
completion
9
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 01
PCWriteCond
PCSource = 01
(O
3
Memory
access
EQ
8
ALUSrcA =1
ALUSrcB = 00
ALUOp = 10
Memory
access
')
)
ype
R-t
=
p
'B
(O
W ')
Execution
ALUSrcA = 1
ALUSrcB = 10
ALUOp = 00
(Op = 'LW')
ALUSrcA = 0
ALUSrcB = 11
ALUOp = 00
(Op = 'J')
Memory address
computation
1
=
Start
MemRead
ALUSrcA = 0
IorD = 0
IRWrite
ALUSrcB = 01
ALUOp = 00
PCWrite
PCSource = 00
(O
p
0
PCWrite
PCSource = 10
Single Cycle Datapath with
Control Unit
0
Add
Add
Shift
left 2
4
ALUOp
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
Address
32
Instr[5-0]
ALU
control
R-type Instruction
Data/Control Flow
0
Add
Add
Shift
left 2
4
ALUOp
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
Address
32
Instr[5-0]
ALU
control
Load Word Instruction
Data/Control Flow
0
Add
Add
Shift
left 2
4
ALUOp
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
Address
32
Instr[5-0]
ALU
control
Branch Instruction
Data/Control Flow
0
Add
Add
Shift
left 2
4
ALUOp
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
Address
32
Instr[5-0]
ALU
control
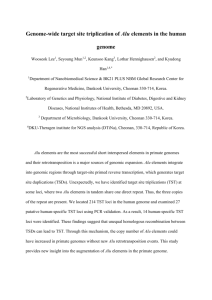
Executing R Format Operations
R format operations (add, sub, slt, and, or)
31
R-type: op
25
rs
20
15
rt
rd
5
0
shamt funct
perform the (op and funct) operation on values in rs and rt
store the result back into the Register File (into location rd)
RegWrite
Instruction
Read Addr 1
Register Read
Read Addr 2 Data 1
File
Write Addr
Read
Write Data
10
ALU control
ALU
overflow
zero
Data 2
The Register File is not written every cycle (e.g. sw), so we need
an explicit write control signal for the Register File
CSE431 L05 Basic MIPS Architecture.60
Irwin, PSU, 2005
Executing Load and Store Operations
Load and store operations involves
compute memory address by adding the base register (read from
the Register File during decode) to the 16-bit signed-extended
offset field in the instruction
store value (read from the Register File during decode) written to
the Data Memory
load value, read from the Data Memory, written to the Register
File
RegWrite
Instruction
ALU control
overflow
zero
Read Addr 1
Register Read
Read Addr 2 Data 1
File
Write Addr
Read
Write Data
16
CSE431 L05 Basic MIPS Architecture.61
Address
ALU
Data
Memory Read Data
Write Data
Data 2
Sign
Extend
MemWrite
MemRead
32
Irwin, PSU, 2005
Executing Branch Operations
Branch operations involves
compare the operands read from the Register File during decode
for equality (zero ALU output)
compute the branch target address by adding the updated PC to
the 16-bit signed-extended offset field in the instr
Add
4
Add
Shift
left 2
Branch
target
address
ALU control
PC
Instruction
Read Addr 1
Register Read
Read Addr 2 Data 1
File
Write Addr
Read
Write Data
CSE431 L05 Basic MIPS Architecture.62
16
zero (to branch
control logic)
ALU
Data 2
Sign
Extend
32
Irwin, PSU, 2005
Executing Jump Operations
Jump operation involves
replace the lower 28 bits of the PC with the lower 26 bits of the
fetched instruction shifted left by 2 bits
Add
4
4
Instruction
Memory
PC
CSE431 L05 Basic MIPS Architecture.63
Read
Address
Shift
left 2
Jump
address
28
Instruction
26
Irwin, PSU, 2005
Creating a Single Datapath from the Parts
Assemble the datapath segments and add control lines
and multiplexors as needed
Single cycle design – fetch, decode and execute each
instructions in one clock cycle
no datapath resource can be used more than once per
instruction, so some must be duplicated (e.g., separate
Instruction Memory and Data Memory, several adders)
multiplexors needed at the input of shared elements with
control lines to do the selection
write signals to control writing to the Register File and Data
Memory
Cycle time is determined by length of the longest path
CSE431 L05 Basic MIPS Architecture.64
Irwin, PSU, 2005
Fetch, R, and Memory Access Portions
Add
RegWrite
ALUSrc ALU control
4
MemtoReg
ovf
zero
Instruction
Memory
PC
MemWrite
Read
Address
Instruction
Read Addr 1
Register Read
Read Addr 2 Data 1
File
Write Addr
Read
Write Data
ALU
Data
Memory Read Data
Write Data
Data 2
Sign
16 Extend
CSE431 L05 Basic MIPS Architecture.65
Address
MemRead
32
Irwin, PSU, 2005
Adding the Control
Selecting the operations to perform (ALU, Register File
and Memory read/write)
Controlling the flow of data (multiplexor inputs)
31
R-type: op
31
Observations
op field always
in bits 31-26
I-Type:
op
31
25
rs
25
rs
20
15
rt
rd
20
rt
10
5
shamt funct
15
0
address offset
25
0
addr of registers J-type: op
target address
to be read are
always specified by the
rs field (bits 25-21) and rt field (bits 20-16); for lw and sw rs is the base
register
addr. of register to be written is in one of two places – in rt (bits 20-16)
for lw; in rd (bits 15-11) for R-type instructions
offset for beq, lw, and sw always in bits 15-0
CSE431 L05 Basic MIPS Architecture.66
0
Irwin, PSU, 2005
Single Cycle Datapath with Control Unit
0
Add
Add
Shift
left 2
4
ALUOp
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Address
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
32
ALU
control
Instr[5-0]
CSE431 L05 Basic MIPS Architecture.67
Irwin, PSU, 2005
R-type Instruction Data/Control Flow
0
Add
Add
Shift
left 2
4
ALUOp
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Address
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
32
ALU
control
Instr[5-0]
CSE431 L05 Basic MIPS Architecture.68
Irwin, PSU, 2005
Load Word Instruction Data/Control Flow
0
Add
Add
Shift
left 2
4
ALUOp
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Address
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
32
ALU
control
Instr[5-0]
CSE431 L05 Basic MIPS Architecture.70
Irwin, PSU, 2005
Branch Instruction Data/Control Flow
0
Add
Add
Shift
left 2
4
ALUOp
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Address
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
32
ALU
control
Instr[5-0]
CSE431 L05 Basic MIPS Architecture.72
Irwin, PSU, 2005
Adding the Jump Operation
Instr[25-0]
Shift
left 2
26
1
28
32
0
PC+4[31-28]
0
Add
Jump
ALUOp
Add
Shift
left 2
4
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Address
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
32
ALU
control
Instr[5-0]
CSE431 L05 Basic MIPS Architecture.73
Irwin, PSU, 2005
Single Cycle Disadvantages & Advantages
Uses the clock cycle inefficiently – the clock cycle must
be timed to accommodate the slowest instruction
especially problematic for more complex instructions like
floating point multiply
Cycle 1
Cycle 2
Clk
lw
sw
Waste
May be wasteful of area since some functional units
(e.g., adders) must be duplicated since they can not be
shared during a clock cycle
but
Is simple and easy to understand
CSE431 L05 Basic MIPS Architecture.74
Irwin, PSU, 2005
Multicycle Datapath Approach
Let an instruction take more than 1 clock cycle to
complete
Break up instructions into steps where each step takes a cycle
while trying to
- balance the amount of work to be done in each step
- restrict each cycle to use only one major functional unit
Not every instruction takes the same number of clock cycles
In addition to faster clock rates, multicycle allows
functional units that can be used more than once per
instruction as long as they are used on different clock
cycles, as a result
only need one memory – but only one memory access per cycle
need only one ALU/adder – but only one ALU operation per
cycle
CSE431 L05 Basic MIPS Architecture.75
Irwin, PSU, 2005
Multicycle Datapath Approach, con’t
At the end of a cycle
Write Data
IR – Instruction Register
A, B – regfile read data registers
ALU
ALUout
A
Read Addr 1
Register Read
Read Addr 2Data 1
File
Write Addr
Read
Data
2
Write Data
B
Memory
Address
Read Data
(Instr. or Data)
IR
Store values needed in a later cycle by the current instruction in an internal
register (not visible to the programmer). All (except IR) hold data only
between a pair of adjacent clock cycles (no write control signal needed)
PC
MDR
MDR – Memory Data Register
ALUout – ALU output register
Data used by subsequent instructions are stored in programmer visible
registers (i.e., register file, PC, or memory)
CSE431 L05 Basic MIPS Architecture.76
Irwin, PSU, 2005
The Multicycle Datapath with Control Signals
Memory
Address
1
1
Write Data
1
Read Data
(Instr. or Data)
0
MDR
Write Data
Data 2
Shift
left 2
28
2
0
1
0
1
zero
ALU
4
0
Instr[15-0] Sign
Extend 32
Instr[5-0]
CSE431 L05 Basic MIPS Architecture.77
Shift
left 2
Instr[25-0]
Read Addr 1
Register Read
Read Addr 2 Data 1
File
Write Addr
Read
IR
PC
Instr[31-26]
0
PC[31-28]
ALUout
MemRead
MemWrite
MemtoReg
IRWrite
PCSource
ALUOp
Control
ALUSrcB
ALUSrcA
RegWrite
RegDst
A
IorD
B
PCWriteCond
PCWrite
0
1
2
3
ALU
control
Irwin, PSU, 2005
Multicycle Control Unit
Multicycle datapath control signals are not determined
solely by the bits in the instruction
e.g., op code bits tell what operation the ALU should be doing,
but not what instruction cycle is to be done next
Must use a finite state machine (FSM) for control
control logic
...
Inst
Opcode
CSE431 L05 Basic MIPS Architecture.78
...
a set of states (current state stored in State Register)
next state function (determined
by current state and the input)
output function (determined by
Combinational
current state and the input)
Datapath
control
points
...
State Reg
Next State
Irwin, PSU, 2005
The Five Steps of the Load Instruction
Cycle 1 Cycle 2 Cycle 3 Cycle 4 Cycle 5
lw
IFetch
Dec
Exec
Mem
WB
IFetch: Instruction Fetch and Update PC
Dec: Instruction Decode, Register Read, Sign
Extend Offset
Exec: Execute R-type; Calculate Memory Address;
Branch Comparison; Branch and Jump Completion
Mem: Memory Read; Memory Write Completion; Rtype Completion (RegFile write)
WB: Memory Read Completion (RegFile write)
INSTRUCTIONS TAKE FROM 3 - 5 CYCLES!
CSE431 L05 Basic MIPS Architecture.79
Irwin, PSU, 2005
Multicycle Advantages & Disadvantages
Uses the clock cycle efficiently – the clock cycle is
timed to accommodate the slowest instruction step
Cycle 1 Cycle 2 Cycle 3 Cycle 4 Cycle 5 Cycle 6 Cycle 7 Cycle 8 Cycle 9Cycle 10
Clk
lw
IFetch
sw
Dec
Exec
Mem
WB
IFetch
R-type
Dec
Exec
Mem
IFetch
Multicycle implementations allow functional units to be
used more than once per instruction as long as they
are used on different clock cycles
but
Requires additional internal state registers, more
muxes, and more complicated (FSM) control
CSE431 L05 Basic MIPS Architecture.80
Irwin, PSU, 2005
Single Cycle vs. Multiple Cycle Timing
Single Cycle Implementation:
Cycle 1
Cycle 2
Clk
lw
sw
multicycle clock
slower than 1/5th of
single cycle clock
due to state register
overhead
Multiple Cycle Implementation:
Clk
Waste
Cycle 1 Cycle 2 Cycle 3 Cycle 4 Cycle 5 Cycle 6 Cycle 7 Cycle 8 Cycle 9Cycle 10
lw
IFetch
sw
Dec
Exec
CSE431 L05 Basic MIPS Architecture.81
Mem
WB
IFetch
R-type
Dec
Exec
Mem
IFetch
Irwin, PSU, 2005
Next Lecture and Reminders
Next lecture
MIPS pipelined datapath review
- Reading assignment – PH, Chapter 6.1-6.3
Reminders
HW2 due September 27th
Evening midterm exam scheduled
- Tuesday, October 18th , 20:15 to 22:15, Location 113 IST
- You should have let me know by now if you have a conflict !!
CSE431 L05 Basic MIPS Architecture.82
Irwin, PSU, 2005
MIPS Subset
• Memory access instructions
– lw, sw
• Arithmetic and logic instructions
– add, sub, and, or, slt
• Branch instructions
– beq, j
Instruction Formats
op
rs
rt
rd
shamt
funct
31:26
25:21
20:16
15:11
10:6
5:0
op
rs
rt
immed
31:26
25:21
20:16
15:0
op
addr
31:26
25:0
Fetch-Decode-Execute
• In order to execute an instruction we must
– Fetch the instruction from memory
– Determine what the instruction is (decode)
– Execute it
• Fetch and decode are the same for all
instructions
• Execute depends on the type of instruction
Executing Load and Store
• Load
–
–
–
–
Fetch operand (base address) from register
Compute effective address
Read data from memory
Write result back to register
• Store
– Fetch operands from registers
– Compute effective address
– Write data to memory
Executing Arithmetic/Logic
• Arithmetic/logic (add, sub, and, or, slt)
– Fetch operands from registers
– Perform operation
– Write result back to register
Executing Branch and Jump
• Conditional branch (beq)
– Fetch operands from registers
– Compare operands
– If equal add displacement to PC
• Jump (j)
– Write new value to PC
Instruction Fetch
• Components
– Instruction Memory
– Program Counter (PC)
– Adder
• Operation
– Fetch the instruction whose address is in the PC
– Increment the PC by 4
Components for Instr Fetch
Instruction
address
PC
Instruction
Add Sum
Instruction
memory
a. Instruction memory
b. Program counter
c. Adder
Instruction Fetch Datapath
Add
4
PC
Read
address
Instruction
Instruction
memory
ALU Instructions
• Components
– Register File
– ALU
• Operation
– Use instruction fields to select registers
– Read source registers and send them to ALU
– Send ALU result to destination register
Components for ALU Instrs
5
Register
numbers
5
5
Data
3
Read
register 1
Read
register 2
Registers
Write
register
Write
data
ALU control
Read
data 1
Data
Zero
ALU ALU
result
Read
data 2
RegWrite
a. Registers
b. ALU
ALU Datapath
3
Read
register 1
Instruction
Read
register 2
Registers
Write
register
Write
data
ALU operation
Read
data 1
Zero
ALU ALU
result
Read
data 2
RegWrite
Memory Access
• Components
–
–
–
–
Register File
ALU
Data Memory
Sign-Extension Unit
• Operation
– ALU adds base register and sign-extended immediate
– Send ALU result to memory as the address
– Read the value from memory into the destination
register (lw) or write the value from the source register
into memory (sw)
Components for Mem Access
MemWrite
Address
Write
data
Read
data
Data
memory
16
Sign
extend
32
MemRead
a. Data memory unit
b. Sign-extension unit
Memory Access Datapath
3
Read
register 1
Instruction
Read
register 2
Registers
Write
register
Write
data
ALU operation
MemWrite
Read
data 1
Zero
ALU ALU
result
Address
Read
data 2
Write
data
RegWrite
16
Sign
extend
32
Read
data
Data
memory
MemRead
Branches
• Components
–
–
–
–
–
Register File
ALU
Program Counter (PC)
Adder
Sign-Extension Unit
• Operation
– Send source register values to ALU for comparison
– Adder computes branch target address
– Control logic decides whether branch is taken or not
Branch Datapath
PC + 4 from instruction datapath
Add Sum
Branch target
Shift
left 2
Instruction
3
Read
register 1
Read
register 2
Registers
Write
register
Write
data
Read
data 1
ALU Zero
Read
data 2
RegWrite
16
ALU operation
Sign
extend
32
To branch
control logic
Putting It All Together
PCSrc
Add
ALU
Add result
4
Shift
left 2
RegWrite
Instruction [25– 21]
PC
Read
address
Instruction
[31– 0]
Instruction
memory
Instruction [20– 16]
1
M
u
Instruction [15– 11] x
0
RegDst
Instruction [15– 0]
Read
register 1
Read
register 2
Read
data 1
MemWrite
ALUSrc
Read
Write
data 2
register
Write
Registers
data
16
Sign
extend
1
M
u
x
0
1
M
u
x
0
Zero
ALU ALU
result
MemtoReg
Address
Write
data
32
ALU
control
Instruction [5– 0]
ALUOp
Read
data
Data
memory
MemRead
1
M
u
x
0
Control Unit
• Control unit takes an instruction as input
and produces control signals as output
• Types of control signals
– Multiplexor selector signals
– Write enables for state elements
– Control signals for other blocks (ALU, etc.)
• In a single-cycle datapath the control unit is
simple, just look up instruction in a table
Control Signals
• RegDst: Selects either rd or rt as the destination
register
• RegWrite: The value on the write data port will be
written into the register specified by the write
register input when asserted
• ALUOp: Selects ALU operation
• ALUSrc: Selects the second ALU input to be either
the second register output or the sign-extended
immediate value
Control Signals (cont'd)
• PCSrc: Selects new PC as either PC + 4 or the
output of the branch target adder
– This signal is derived from the Branch control signal
and the ALU's Zero output
• MemRead/MemWrite: Causes data memory to
perform a read/write operation when asserted
• MemToReg: Selects either the ALU output or the
data memory output as the data input into the
register file
ALU Control
• In order to simplify design of the control
unit we give the ALU its own control logic
• The ALU control block takes a 2-bit input
from the control unit (ALUOp) and the funct
field from the instruction and produces the
ALU control signals
ALU Control Signals
Instruction
ALUOp
lw
funct Field
ALU Function
ALU Inputs
00
Add
0010
sw
00
Add
0010
beq
01
Subtract
0110
add
10
100000
Add
0010
sub
10
100010
Subtract
0110
and
10
100100
AND
0000
or
10
100101
OR
0001
slt
10
101010
Set on less than
0111
Operation of Control Unit
ALU
lw
sw
beq
ALUOp
10
00
00
01
ALUSrc
0
1
1
0
Branch
0
0
0
1
MemRead
0
1
0
0
MemWrite
0
0
1
0
MemToReg
0
1
x
x
RegDst
1
0
x
x
RegWrite
1
1
0
0
Datapath with Control Unit
0
M
u
x
ALU
Add result
Add
4
Instruction [31 26]
Control
Instruction [25 21]
PC
Read
address
Instruction
memory
Instruction [15 11]
Shift
left 2
RegDst
Branch
MemRead
MemtoReg
ALUOp
MemWrite
ALUSrc
RegWrite
PCSrc
Read
register 1
Instruction [20 16]
Instruction
[31– 0]
1
0
M
u
x
1
Read
data 1
Read
register 2
Registers Read
Write
data 2
register
0
M
u
x
1
Write
data
Zero
ALU ALU
result
Address
Write
data
Instruction [15 0]
16
Instruction [5 0]
Sign
extend
32
ALU
control
Read
data
Data
memory
1
M
u
x
0
Jump Instructions
• The unconditional branch instruction (j)
computes its branch target differently from
the conditional branch instruction (beq)
• Branch target address is:
– Top 4 bits of PC + 4
– 26-bit immediate value
– Two zero bits
Datapath with Jump
Instruction [25– 0]
26
Shift
left 2
Jump address [31– 0]
28
0
1
M
u
x
M
u
x
ALU
Add result
1
0
Zero
ALU ALU
result
Address
PC+4 [31– 28]
Add
4
Instruction [31– 26]
Control
Instruction [25– 21]
PC
Read
address
Instruction
memory
Read
register 1
Instruction [20– 16]
Instruction
[31– 0]
Instruction [15– 11]
Shift
left 2
RegDst
Jump
Branch
MemRead
MemtoReg
ALUOp
MemWrite
ALUSrc
RegWrite
0
M
u
x
1
Read
data 1
Read
register 2
Registers Read
Write
data 2
register
0
M
u
x
1
Write
data
Write
data
Instruction [15– 0]
16
Instruction [5– 0]
Sign
extend
32
ALU
control
Read
data
Data
memory
1
M
u
x
0
Adding the Jump Operation
Instr[25-0]
Shift
left 2
26
1
28
32
0
PC+4[31-28]
0
Add
Jump
ALUOp
Add
Shift
left 2
4
1
PCSrc
Branch
MemRead
MemtoReg
MemWrite
Instr[31-26] Control
Unit
ALUSrc
RegWrite
RegDst
Instruction
Memory
PC
Read
Address
Instr[31-0]
ovf
Instr[25-21] Read Addr 1
Register Read
Instr[20-16] Read Addr 2 Data 1
File
0
Write Addr
Read
1
Instr[15
-11]
Instr[15-0]
Write Data
zero
ALU
Data
Memory Read Data
1
Write Data
0
0
Data 2
1
Sign
16 Extend
Address
32
Instr[5-0]
ALU
control
Performance
• The single-cycle datapath executes each
instruction in just one cycle
• CPI is 1.0, which is optimal
• However, minimum clock cycle time is
determined by slowest instruction
• In practice the execution time can vary
considerably between instructions making a
single-cycle implementation a poor choice
Using Multiple Cycles
• A multi-cycle datapath splits instruction execution
into multiple steps, where each step take one cycle
• If an instruction doesn't need a step it skips it, so
different instructions run for different numbers of
cycles
• Slow instructions don't slow down the entire
processor
• Control unit becomes more complicated
• Hardware can be shared between steps
Multicycle Datapath (1)
Instruction
register
PC
Address
Data
A
Memory
Data
Register #
Instruction
or data
Memory
data
register
ALU
Registers
Register #
B
Register #
ALUOut
Multicycle Differences
• A functional unit can be used more than
once in the execution of an instruction, so
long as those uses occur in different steps
– Instruction memory and data memory are
combined into a single unit
– ALU takes over for the two separate adders
• Additional registers are needed to save
information between steps
Multicycle Datapath (2)
PC
0
M
u
x
1
Address
Memory
MemData
Write
data
Instruction
[25– 21]
Read
register 1
Instruction
[20– 16]
Read
Read
register 2 data 1
Registers
Write
Read
register data 2
Instruction
[15– 0]
Instruction
register
Instruction
[15– 0]
Memory
data
register
0
M
Instruction u
x
[15– 11]
1
A
B
4
Write
data
0
M
u
x
1
16
Sign
extend
0
M
u
x
1
32
Shift
left 2
0
1 M
u
2 x
3
Zero
ALU ALU
result
ALUOut
Multicycle Datapath (3)
IorD
PC
0
M
u
x
1
MemRead MemWrite
RegDst
RegWrite
Instruction
[25– 21]
Address
Memory
MemData
Write
data
IRWrite
Instruction
register
Instruction
[15– 0]
Memory
data
register
0
M
u
x
1
Read
register 1
Read
Read
data 1
register 2
Registers
Write
Read
register data 2
Instruction
[20– 16]
Instruction
[15– 0]
ALUSrcA
0
M
Instruction u
x
[15– 11]
1
A
B
4
Write
data
0
M
u
x
1
16
Sign
extend
32
Shift
left 2
Zero
ALU ALU
result
0
1 M
u
2 x
3
ALU
control
Instruction [5– 0]
MemtoReg
ALUSrcB ALUOp
ALUOut
Multicycle Datapath (4)
PCWriteCond
PCSource
PCWrite
ALUOp
IorD Outputs
ALUSrcB
MemRead
ALUSrcA
MemWrite Control
RegWrite
MemtoReg
Op
RegDst
IRWrite
[5– 0]
0
M
26
Instruction [25– 0]
PC
0
M
u
x
1
Shift
left 2
Instruction
[31-26]
Address
Memory
MemData
Write
data
Instruction
[25– 21]
Read
register 1
Instruction
[20– 16]
Read
Read
register 2 data 1
Registers
Write
Read
register data 2
Instruction
[15– 0]
Instruction
register
Instruction
[15– 0]
Memory
data
register
0
M
Instruction u
x
[15– 11]
1
B
4
Write
data
0
M
u
x
1
16
Sign
extend
32
Instruction [5– 0]
Shift
left 2
Zero
ALU ALU
result
0
1 M
u
2 x
3
ALU
control
1 u
x
2
PC [31-28]
0
M
u
x
1
A
28
Jump
address [31-0]
ALUOut
Multicycle Registers
• Instruction register (IR): hold the instruction
during its execution
• Memory data register (MDR): hold the data
read from memory for one cycle
• A: hold source register for one cycle
• B: hold source register for one cycle
• ALUOut: hold ALU output for one cycle
New Control Signals
• ALUSrcA: selects first ALU operand to be either
the PC or the A register
• ALUSrcB: selects second ALU operand from: B
register, constant 4, sign-extended immediate,
sign-extended and shifted immediate
• MemtoReg: selects register file write data as
coming from either ALUOut or MDR
• IorD: selects the memory address as coming from
either PC or ALUOut
New Control Signals (cont'd)
• IRWrite: If asserted the memory output is
written to IR
• PCSource: Selects the new value for the PC
from: ALU, ALUOut, jump target address
• PCWrite: If asserted the PC is written
• PCWriteCond: If asserted and the zero
output from the ALU is 1 then the PC is
written
Instruction Execution Steps
• Instruction fetch
• Instruction decode and register fetch
• Execution, memory address computation, or
branch completion
• Memory access or R-type completion
• Memory read completion
Instruction Fetch
• Fetch instruction from memory
– IR ← Memory[PC]
• Increment the PC
– PC ← PC + 4
Instruction Decode
• Fetch operands from register file
– A ← Reg[IR[25:21]]
– B ← Reg[IR[20:16]]
• Compute branch target address
– ALUOut ← PC + (sign-extend(IR[15:0]) << 2)
Execute
• Load/store: Compute memory address
– ALUOut ← A + sign-extend(IR[15:0])
• R-type: Perform operation specified by instruction
– ALUOut ← A op B
• Branch: Compare registers and set PC if equal
– if (A == B) PC ← ALUOut
• Jump: Set PC to jump target address
– PC ← {PC[31:28], (IR[25:0] << 2)}
Memory Access
• Load: Read memory word into MDR
– MDR ← Memory[ALUOut]
• Store: Write B into memory
– Memory[ALUOut] ← B
• R-type: Write result to destination register
– Reg[IR[15:11]] ← ALUOut
Memory Read Completion
• Load: Write result to destination register
– Reg[IR[20:16]] ← MDR
State Machine
• A state machine is a sequential logic device with:
– Set of states
– Next-state function which determines the next state
from the current state and the inputs
– Output function which determines the outputs from the
current state and possibly the inputs
• In a Moore machine the output depends only on
the state; in a Mealy machine the output depends
on the state and the inputs
Control with a State Machine
• The control unit for our multicycle datapath
will be a state machine
• The only input is the op field of the
instruction; the outputs are the control
signals
• Each step may have multiple states if
control signals depend on the instruction
Fetch and Decode States
Instruction decode/
Register fetch
Instruction fetch
'LW
Memory reference FSM
(Figure 5.38)
R-type FSM
(Figure 5.39)
EQ
')
'B
p=
(O
)
ype
t
R
=
W ')
ALUSrcA = 0
ALUSrcB = 11
ALUOp = 00
Branch FSM
(Figure 5.40)
(Op = 'JMP')
=
(Op
'S
p=
O
(
') or
1
p
Start
MemRead
ALUSrcA = 0
IorD = 0
IRWrite
ALUSrcB = 01
ALUOp = 00
PCWrite
PCSource = 00
(O
0
Jump FSM
(Figure 5.41)
Load and Store States
From state 1
(Op = 'LW') or (Op = 'SW')
Memory address computation
2
(O
p
=
'S
')
W
(Op = 'LW')
ALUSrcA = 1
ALUSrcB = 10
ALUOp = 00
Memory
access
3
Memory
access
5
MemRead
IorD = 1
MemWrite
IorD = 1
Write-back step
4
RegWrite
MemtoReg = 1
RegDst = 0
To state 0
(Figure 5.37)
R-Type States
From state 1
(Op = R-type)
Execution
6
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 10
R-type completion
7
RegDst = 1
RegWrite
MemtoReg = 0
To state 0
(Figure 5.37)
Branch State
From state 1
(Op = 'BEQ')
Branch completion
8
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 01
PCWriteCond
PCSource = 01
To state 0
(Figure 5.37)
Jump State
From state 1
(Op = 'J')
Jump completion
9
PCWrite
PCSource = 10
To state 0
(Figure 5.37)
Complete State Machine
Instruction decode/
register fetch
Instruction fetch
(Op
2
W
= 'L
(Op
') or
= 'S
6
Branch
completion
p
=
'S
')
W
5
MemRead
IorD = 1
Write-back step
4
RegDst = 0
RegWrite
MemtoReg = 1
R-type completion
7
MemWrite
IorD = 1
RegDst = 1
RegWrite
MemtoReg = 0
Jump
completion
9
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 01
PCWriteCond
PCSource = 01
(O
3
Memory
access
EQ
8
ALUSrcA =1
ALUSrcB = 00
ALUOp = 10
Memory
access
')
)
ype
R-t
=
p
'B
(O
W ')
Execution
ALUSrcA = 1
ALUSrcB = 10
ALUOp = 00
(Op = 'LW')
ALUSrcA = 0
ALUSrcB = 11
ALUOp = 00
(Op = 'J')
Memory address
computation
1
=
Start
MemRead
ALUSrcA = 0
IorD = 0
IRWrite
ALUSrcB = 01
ALUOp = 00
PCWrite
PCSource = 00
(O
p
0
PCWrite
PCSource = 10
Exceptions
• An exception is an event that causes an
unscheduled transfer of control
• Also known as interrupts and traps
• Typically an interrupt is caused externally while
an exception or trap is caused internally
• Arithmetic overflow is an example of an
exception; an I/O device request is an example of
an interrupt
Handling Exceptions
• When hardware detects an exception it
transfers control to a software routine called
an exception handler which is typically a
part of an operating system
• The hardware saves the value of the PC in
the exception PC (EPC) register so it can
return there after the exception is handled
Determining the Cause
• The hardware must tell the exception
handler what the cause of the exception was
• One way to do this is store a value into a
special Cause register (MIPS)
• Another way is to use vectored interrupts
where control is transferred to a different
address depending on the cause
Exceptions to Implement
• Undefined instruction occurs when the op
field of an instruction indicates an
undefined or unimplemented instruction
• Arithmetic overflow occurs when the ALU
indicates that overflow has occurred during
an R-type instruction
Adding Exceptions
• The EPC register saves the old PC; it is written
when the EPCWrite is asserted
• The Cause register records the cause of the
exception; it is written when CauseWrite is
asserted
• The IntCause signal indicates the cause of the
exception
• Control is always transferred to 0x80000180
Changes to the Datapath
CauseWrite
IntCause
EPCWrite
PCSource
ALUOp
PCWriteCond
PCWrite
IorD
Outputs
MemRead
MemWrite
ALUSrcB
Control
ALUSrcA
MemtoReg
IRWrite
RegWrite
Op
[5– 0]
RegDst
0
26
Instruction [25– 0]
PC
0
M
u
x
1
Shift
left 2
Instruction
[31-26]
Address
Memory
MemData
Read
register 1
Instruction
[20– 16]
Read
Read
register 2 data 1
Registers
Write
Read
register data 2
Write
data
Instruction
register
Instruction
[15– 0]
Memory
data
register
0
M
Instruction u
x
[15– 11]
1
B
4
Write
data
0
M
u
x
1
Zero
ALU ALU
result
Sign
extend
32
Instruction [5– 0]
Shift
left 2
3
0
1M
u
2 x
3
ALUOut
0
1
16
u
x
PC [31-28]
0
M
u
x
1
A
1M
2
CO 00 00 00
Instruction
[25– 21]
Instruction
[15– 0]
28
Jump
address [31-0]
ALU
control
EPC
0
M
u
x
1
Cause
Changes to the Control Unit
Instruction decode/
Register fetch
1
Instruction fetch
0
MemRead
ALUSrcA = 0
IorD = 0
IRWrite
ALUSrcB = 01
ALUOp = 00
PCWrite
PCSource = 00
(Op = 'J')
Q
')
'B
E
=
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 01
PCWriteCond
PCSource = 01
9
PCWrite
PCSource = 10
(O
p
=
W
'S
')
(Op = 'LW')
8
Jump
completion
r)
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 10
e
oth
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 00
)
y pe
R-t
=
p
(O
Branch
completion
p=
(O
W')
= 'S
(Op
r
Execution
o
W')
= 'L
6
(Op
Memory address
computation
2
ALUSrcA = 0
ALUSrcB = 11
ALUOp = 00
(O
p
Start
Memory
access
3
Memory
access
5
MemRead
IorD = 1
R-type completion
7
MemWrite
IorD = 1
11
RegDst = 1
RegWrite
MemtoReg = 0
Write-back step
4
RegWrite
MemtoReg = 1
RegDst = 0
Overflow
Overflow
IntCause = 1
CauseWrite
ALUSrcA = 0
ALUSrcB = 01
ALUOp = 01
EPCWrite
PCWrite
PCSource = 11
10
IntCause = 0
CauseWrite
ALUSrcA = 0
ALUSrcB = 01
ALUOp = 01
EPCWrite
PCWrite
PCSource = 11
Microprogramming
• An alternative to state machines for control is
microprogramming
• Each instruction corresponds to a sequence of
microinstructions (a microprogram)
• The opcode bits specify the starting address of the
microprogram within the microcode ROM.
• A microinstruction contains values for all of the
control signals plus some sequencing control bits
• Microprogramming makes it easier to change the
control unit or to implement complex instructions
Microprogramming (cont'd)
Microcode
storage
Datapath
control
outputs
Outputs
Input
1
Microprogram counter
Adder
Address select logic
Inputs from instruction
register opcode field
Sequencing
control
Multicycle Performance
• The multicycle datapath has a much shorter
clock cycle time than the single-cycle
datapath
• However, it also has a larger CPI
• Is the multicycle datapath really faster?
• Depends on the instruction mix
• Can we still do better?