Kinesiology01_Introduction
advertisement

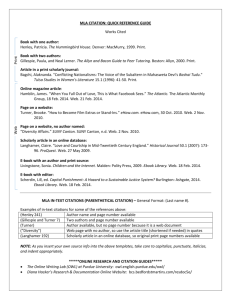
KINESIOLOGY OF THE MUSCULOSKELETAL SYSTEM Dr. Michael P. Gillespie KINESIOLOGY Kinesis – to move Logy – to study VITRUVIAN MAN – LEONARDO DA VINCI Dr. Michael P. Gillespie 3 MUSCULORUM CORPORIS HUMANI BERNHARD SIEGFREID ALBINUS Dr. Michael P. Gillespie 4 KINEMATICS Kinematics describes the motion of a body without regard to the forces or torques that produce the motion. In biomechanics the term body can describe the entire body or any of its parts. It can describe specific regions, segments, or bones. Dr. Michael P. Gillespie 5 TWO TYPES OF MOTION Dr. Michael P. Gillespie Translation – a linear motion in which all parts of a rigid body move parallel to and in the same direction as every other part. Rectilinear – translation in a straight line. Curvilinear – translation in a curved line. Rotation – a motion in which an assumed rigid body moves in a circular path around some pivot point. 6 TRANSLATION & ROTATION Movement of the body as a whole is described as translation of the body’s center of mass (located just anterior to the sacrum). The movement of the body is powered by muscles that rotate the limbs. The phrases “rotation of a joint” and “rotation of a bone” are used interchangeably. The pivot point for angular motion is called the axis of rotation. Dr. Michael P. Gillespie 7 TYPES OF MOVEMENT Active movement – movement caused by stimulating a muscle. Passive movement – movement caused by sources other than active muscle contraction. Dr. Michael P. Gillespie Push from another person Pull of gravity Tension in stretched connective tissues 8 VARIABLES AND UNITS OF MEASUREMENT RELATED TO KINEMATICS Variables related to kinematics Position Velocity Acceleration Dr. Michael P. Gillespie Units of measurement Translation – meters or feet Rotation – degrees or radians 9 INTERNATIONAL SYSTEM OF UNITS This system is widely accepted in many journals related to kinesiology and rehabilitation. It is abbreviated SI, for Systeme International d’Unites, the French name. Dr. Michael P. Gillespie 10 COMMON CONVERSIONS BETWEEN UNITS English Units 1 meter (m) = 3.28 feet (ft) 1 ft = 0.305 m 1 m = 39.37 inches (in) 1 in = 0.0254 m 1 centimeter (cm) = 0.39 in 1 in = 2.54 cm 1 m = 1.09 yards (yd) 1 yd = 0.91 m 1 kilometer (km) = 0.62 miles (mi) 1 mi = 1.61 km 1 degree = 0.0174 radians (rad) 1 rad = 57.3 degrees Dr. Michael P. Gillespie SI Units 11 OSTEOKINEMATICS Sagittal plane – runs parallel to the sagittal suture of the skull and divides the body into right and left sections. Frontal plane – runs parallel to the coronal suture of the skull and divides the body into anterior and posterior sections. Horizontal plane (transverse) – runs parallel to the horizon and divides the body into upper and lower sections. Dr. Michael P. Gillespie Osteokinematics describes the motion of bones relative to the three cardinal (principal) planes of the body. 12 CARDINAL PLANES OF THE BODY Dr. Michael P. Gillespie 13 A SAMPLE OF COMMON OSTEOKINEMATIC TERMS Common Terms Sagittal Plane Flexion and extension Dorsiflexion and plantar flexion Forward and backward bending Frontal Plane Abduction and adduction Lateral flexion Ulnar and radial deviation Eversion and inversion Horizontal Plane Internal (medial) and external (lateral) rotation Axial rotation Dr. Michael P. Gillespie Plane 14 AXIS OF ROTATION Bones rotate around a joint in a plane that is perpendicular to an axis of rotation. The axis is typically located through the convex member of a joint. The shoulder allows movement in all three planes and therefore has three axes of rotation. The axes of rotation are depicted as stationary; however, in reality, each axis shifts slightly throughout the range of motion. Dr. Michael P. Gillespie 15 DEGREES OF FREEDOM Dr. Michael P. Gillespie Degrees of freedom are the number of independent directions of movements allowed at a particular joint. A joint can have up to three degrees of angular freedom which correspond to the three cardinal planes. For purposes of kinesiology, degrees of freedom indicates the number of permitted planes of angular motion at a joint. Strictly speaking, from an engineering perspective, degrees of freedom would also include translational (linear) as well as angular movement. Natural laxity within the joint structure allows for some translation. This is referred to as accessory movement or joint “play”. The amount of passive translation can be used clinically to asses the integrity of the joint. Excessive translation can indicate ligament injury or laxity. Abnormal translation can affect active movements and lead to increased intra-articular stress and microtrauma. 16 OSTEOKINEMATICS Movement of a joint can be considered from two perspectives: State the bone that is considered the primary rotating segment. Dr. Michael P. Gillespie 1. The proximal segment can rotate against the relatively fixed distal segment. 2. The distal segment can rotate against the relatively fixed proximal segment. Tibial-on-femoral movement Femoral-on-tibial movement 17 UPPER EXTREMITY OSTEOKINEMATICS Most routine movements of the upper extremity involve distal-on-proximal segment kinematics. We bring objects held by the hand either closer to or further away from the body (i.e. eating and throwing a baseball). The proximal segment is stabilized by muscles, gravity or inertia. The distal segment segment rotates with fairly free movement. Dr. Michael P. Gillespie 18 LOWER EXTREMITY OSTEOKINEMATICS The lower extremities perform both proximal-ondistal and distal-on-proximal segment kinematics. These kinematics are apparent in walking during the stance phase and the swing phase. Kicking and squatting are also good examples of distal-on-proximal and proximal-on-distal kinematics respectively. Dr. Michael P. Gillespie 19 DISTAL-ON-PROXIMAL & PROXIMALON-DISTAL KINEMATICS Dr. Michael P. Gillespie 20 OPEN AND CLOSED KINEMATIC CHAINS Dr. Michael P. Gillespie The terms “open” and “closed” are typically used to indicate whether the distal end of an extremity is fixed to the earth or some other immoveable object. An open kinematic chain describes a situation in which the distal segment of the kinematic chain is not fixed to the earth or other immoveable object. A closed kinematic chain describes a situation in which the distal segment of the kinematic chain is fixed to the earth or another immoveable object. From an engineering perspective, the terms apply to the kinematic interdependence of a series of connected rigid links. 21 ARTHROKINEMATICS Roll Slide Spin Dr. Michael P. Gillespie Arthrokinematics describes the motion that occurs between the articular surfaces of joints. The shapes of articular surfaces range from flat to curved. Most joint surfaces are at least slightly curved. One side is convex and the other is concave. This convex-concave relationship improves joint congruency (fit), increases the surface area to dissipate forces, and helps to guide the motion between joints. The fundamental movements that exists between curved joint surfaces are as follows: 22 FUNDAMENTAL ARTHROKINEMATIC MOVEMENTS Definition Analogy Roll (rock) Multiple points along A tire rotating on a one rotating articular stretch of pavement surface contact multiple points on another articular surface Slide (glide) A single point on one articular surface contacts multiple points on another articular surface A non-rotating tire skidding across a stretch of icy pavement Spin A single point on one articular surface rotates on a single point on another articular surface A toy top rotating on one spot on the floor Dr. Michael P. Gillespie Movement 23 ARTHROKINEMATICS Dr. Michael P. Gillespie 24 ARTHROKINEMATIC PRINCIPLES OF MOVEMENT For a convex-on-concave surface movement, the convex member rolls and slides in opposite directions. For a concave-on-convex surface movement, the concave member rolls and slides in similar directions. Manual therapy techniques can take advantage of these principles by applying external forces to assist or guide the natural arthrokinematics of the joint. Dr. Michael P. Gillespie 25 CLOSE-PACKED AND LOOSEPACKED POSITIONS AT A JOINT Close-packed position. The pair of articular surfaces within most joints “fits” best in only one position, which is usually at the end of the range of motion. This position of maximal congruency is referred to as the joint’s close-packed position. In this position, most ligaments and parts of the capsule are pulled taut, which provides stability. Accessory movements are minimal. Used in standing. Dr. Michael P. Gillespie Loose-packed position. All positions other than a joint’s close-packed position are referred to as the joint’s loose-packed positions. The ligaments and capsule are relatively slackened. There is an increase in accessory movements. The joint is least congruent near its midrange. Biased towards flexion. Used during long periods of immobilization. 26 KINETICS Kinetics is the branch of study of mechanics that describes the effect of forces on the body. A force is a push or pull that can produce, arrest, or modify movements. Forces either move or stabilize the body. Newton’s 2nd law of motion states that the force (F) is the product of the mass (m) times the acceleration (a) of the mass. F=ma The standard international unit of force is the newton (N): 1 N = 1 kg x 1 m/sec2. The Englosh equivalent of the newton is the pound (lb): 1 lb = 1 slug x 1 ft/sec2 (4.448 N = 1 lb). Dr. Michael P. Gillespie 27 MUSCULOSKELETAL FORCES Load – A force that acts on the body is often referred to generically as a load. Forces or loads that move, fixate, or otherwise stabilize the body also have the potential to deform and injure the body. Any tissue weakened by disease, trauma, or prolonged disuse may not be able to adequately resist the application of loads placed upon it. Dr. Michael P. Gillespie 28 LOADS FREQUENTLY APPLIED TO THE MUSCULOSKELETAL SYSTEM Tension Compression Bending Shear Torsion Combined loading Dr. Michael P. Gillespie 29 LOADING MODES Dr. Michael P. Gillespie 30 LOADS FREQUENTLY APPLIED TO THE MUSCULOSKELETAL SYSTEM Dr. Michael P. Gillespie 31 LOADS FREQUENTLY APPLIED TO THE MUSCULOSKELETAL SYSTEM Dr. Michael P. Gillespie 32 STRESS-STRAIN RELATIONSHIP OF TISSUES Stress is applied to a tissue with a resultant strain on that tissue. Initially, the tissue will respond with an elastic strain. It will stretch; however, it can return to its prior state. With continued stress, the tissue will eventually reach a yield point. The tissue will begin to undergo plastic deformation. If the stress continues, the tissue will reach an ultimate failure point. At this point, the tissue completely separates and loses its ability to hold any level of tension. Dr. Michael P. Gillespie 33 STRESS-STRAIN RELATIONSHIP OF TISSUES Dr. Michael P. Gillespie 34 INTERNAL & EXTERNAL FORCES Internal forces are produced from structures within the body. External forces are produced by forced acting from outside the body. Dr. Michael P. Gillespie Active forces are generated by stimulated muscle. Passive forces are generated by tension in stretched periarticular tissues (intramuscular connective tissues, ligaments, and joint capsules). Gravity pulling on the mass of a body segment. An external load. Physical contact. 35 INTERNAL & EXTERNAL FORCES Dr. Michael P. Gillespie 36 VECTORS Forces are depicted by arrows that represent a vector. A vector is a quantity that is completely specified by its magnitude and direction. In order to completely identify a vector in a biomechanical analysis, its magnitude, spatial orientation, direction, and point of application must be known. Dr. Michael P. Gillespie 37 MUSCLE AND JOINT INTERACTION Dr. Michael P. Gillespie Muscle and joint interaction refers to the overall effect that a muscle force may have on a joint. 38 TYPES OF MUSCLE ACTIVATION Isometric activation A muscle is producing a pulling force while maintaining a constant length. Greek isos (equal) and metron (measure or length). The internal torque is equal to the external torque. There is no muscle shortening or rotation at the joint. Concentric activation A muscle produces a pulling force as it contracts (shortens). Concentric means “coming to the center”. The internal torque exceeds the external torque. The contracting muscle creates a rotation of the joint in the direction of the contracting muscle. Dr. Michael P. Gillespie Eccentric activation A muscle produces a pulling force as it is being elongated by another more dominant force. Eccentric means “away from the center”. The external torque exceeds the internal torque. The joint rotates in the direction dictated by the larger external torque. 39 CONTRACTION The term contraction is often used synonymously with the term activation, regardless of whether or not the muscle is really shortening, lengthening, or remaining at a constant length. The term contract literally means to be “drawn together”. Technically, contraction of a muscle occurs during concentric activation only. Dr. Michael P. Gillespie 40