lyapunov stability for linear time
advertisement

EXAMPLES:
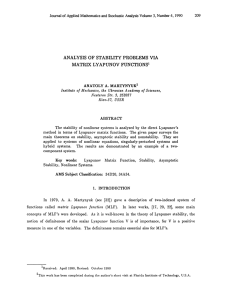
Example 1: Consider the system
x 1 x 2
1 5
x 2 x1 x1 x 2
16
Calculate the equilibrium points for the system.
Plot the phase portrait of the system.
Solution:
The equilibrium points must be stationary. Therefore for the first system we
have
0 x2
1 5
0 x1 x1 x 2
16
0 x2
1 5
0 x1 x1 x1 1 0.0625x14
16
0 x2
1 5
0 x1 x1 x1 1 0.0625x14
16
x1=0
roots([-1/16 0 0 0 1])
ans =
-2.0000
-0.0000 + 2.0000i
-0.0000 - 2.0000i
2.0000
The equilibrium points are
xe=[(0,0),(2,0),(-2,0)]
The jacobian matrix is defined as
f1
x
J 1
f 2
x1
f1
0
x 2
5 4
1
x1
f 2
16
x 2
1
1
0 1
J xe1( 0, 0 )
1
1
eig ( J )
0
5
4
1
(
2
)
16
J xe 2( 2, 0 )
1 0 1
1 4 1
eig (J )
The same result is
obtained for xe3 (2,0)
- 0.5000 + 0.8660i
1.5616
- 0.5000 - 0.8660i
- 2.5616
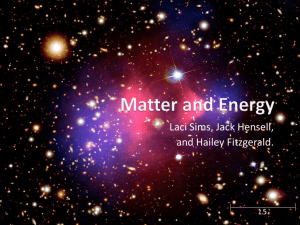
Saddle points
2
Stable node
1.5
1
2
0.5
x
[x1, x2] = meshgrid(-4:0.2:4, -2:0.2:2);
x1dot = x2;
x2dot = -x1+(1/16)*x1.^5-x2;
quiver(x1,x2,x1dot,x2dot)
xlabel('x_1')
ylabel('x_2')
0
-0.5
-1
-1.5
-2
-3
-2
-1
0
x1
1
2
3
Example 2. Show that the origin of the system is stable, using a suitable
Lyapunov function.
x 1 x 2
x 2 x13 x 32
Solution: Let us use the following Lyapunov function
1 4 1 2
V( x ) x1 x 2
4
2
( x ) dV V dx V f ( x )
V
dt
x dt
V V f1 ( x )
,
f ( x )
x
x
2 2
1
x2
3
V ( x ) x1 , x 2 3
3
x
x
2
1
(x) x 3x x x 3 x 3
V
1 2
2
1
2
(x) x 4 0
V
2
The system is stable in the sense of Lyapunov.
Example 3:
R(s) +
y
1
s2 1
s
y3
C(s)
3
s 1
N
Find the describing function of the nonlinear element N of the control system.
1
3 sin t sin 3t
sin t
4
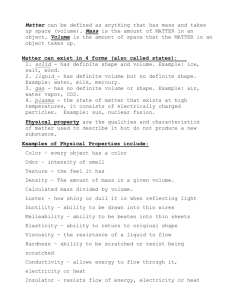
For a sinusoidal input
w y3
3
0.8
ODD FUNCT ION
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-2
-1.5
-1
3
A
3 sin t sin 3t
w ( t ) y3 ( t ) A 3 sin 3 t
4
w(t ) a1 cost b1 sin t
-0.5
0
0.5
1
a1=0
1.5
2
1 3A3
A3
b1
sin t
sin 3t sin t dt
4
4
>>syms tet;syms A;
>>b1=‘((3*A^3/4)*sin(tet)-A^3/4*sin(3*tet))*sin(tet)’;
>>int(b1,-pi,pi)
1 3 A3 3A3
b1
4
4
3A3
sin t
w1
4
w1 NA, y(t) N(A, ) A sin t
3A 2
A sin t
w1
4
N(A)
Example 4:
Determine whether the system in the Figure exhibits a self-sustained oscillation
(a limit cycle).
R(s) +
K
s2 3s 2
1
-1
C(s)
-
N(A,ω)
4M
4
N(A, ) NA
A A
1 NA G (s) 0
4
K
1
0
2
A s 3 s 2
As 2 3As 2A 4K 0
s1, 2
9 2 A 2 4A * 2A 4K
3A
2A
2A
s1, 2
9 2 A 2 8 2 A 2 16KA
1.5
2A
s1, 2
2 A 2 16KA
1.5
2A
Since there is always a negative real part, the system doesn’t exhibit a limit
cycle.
LYAPUNOV STABILITY FOR LINEAR TIME-INVARIANT SYSTEMS:
Given a linear system of the form
x A x
Let us consider a quadratic Lyapunov function candidate
V x T Px
where P is a given symmetric positive definite matrix.
Differentiating the positive definite function V along the system trajectory yields
another quadratic form
x T Px x T Px
V
where
T
V Ax Px x T PAx
x T A T Px x T P A x
x T A T P P A x
A T P P A Q
x TQ x
If there exists a positive definite matrix Q satisfying the equation (Lyapunov
equation), the system is said to be stable in the sense of Lyapunov (ISL).
AT P P A Q 0
Lyapunov equation.
A useful way of studying a given linear system using scalar quadratic functions
is to derive a positive definite matrix P from a given positive definite matrix Q,
i.e.,
•choose a positive definite matrix Q
•solve for P from the Lyapunov equation
•check whether P is positive definite
If P is positive definite, then xTPx is a Lyapunov function for the linear system
and global asymptotical stability is guaranteed.
Example:
Consider two matrices,
1
0
1 0
A
,Q
12
8
0
1
The linear system is stable (Real parts of all eigenvalues of the system matrix A
are negative) if there is a positive definite matrix P.
Using Matlab, we can find the matrix P as
clc;clear;
A=[0 1;-12 -8];
Q=[1 0;0 1];
P=lyap(A,Q)
eig(P)
P=
0.4010 -0.5000
-0.5000 0.8125
ans =
0.0661
1.1474
The matrix P is positive definite, since the eigenvalues are
real, and the system is stable ISL.
LYAPUNOV FUNCTION FOR NONLINEAR SYSTEM:
Krasovskii’s method suggests a simple form of Lyapunov function candidate
(LFC) for autonomous nonlinear systems, namely, V=fTf. The basic idea of the
method is simply to check whether this particular choice indeed leads to a
Lyapunov function.
Theorem (Krasovskii): Consider the autonomous system defined by dx/dt=f(x),
with the equilibrium point of interest being the origin. Let J(x) denote the
Jacobian matrix of the system, i.e.,
f
J(x )
x
If the matrix F=J+JT is negative definite, the equilibrium point at the origin is
asymptotically stable. A Lyapunov function for this system is
V(x) f T (x)f (x)
If V(x) ∞ as ǁxǁ ∞, then the equilibrium point is globally asymptotically
stable.
Example:
Consider a nonlinear system
x 1 6 x1 2 x 2
x 2 2x1 6x 2 2x 32
We have
f1
f x1
J
x f 2
x1
f1
2
x 2 6
f 2 2 6 6 x 22
x 2
4
12
FJJ
2
4
12
12
x
2
T
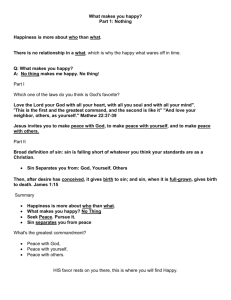
The matrix F is negative definite over the whole state space. Therefore, the
origin is asymptotically stable, and a Lyapunov function candidate is
-8
-8.5
-9
-9.5
2
clc;clear;
x2=-10:0.1:10;
for i=1:length(x2)
F=[-12 4;4 -12-12*x2(i)^2];
eg=eig(F)
plot(eg(1),eg(2))
hold on
end
-10
-10.5
-11
-11.5
-12
-1400
-1200
-1000
-800
-600
-400
-200
0
1
V( x ) f ( x )f ( x ) 6x1 2x 2 , 2x1 6x 2 2x
T
3
2
6x1 2x 2
2x 6x 2x 3
2
2
1
V( x) f T (x)f (x) 6x1 2x 2 2x1 6x 2 2x 32
2
2
Since V(x) ∞ as ǁxǁ ∞, then the equilibrium point is globally asymptotically
stable.
Example (Variable Gradient Method):
Consider a nonlinear system
x 1 2x1
x 2 2x 2 2x1x 22
We assume that the gradient of the undetermined Lyapunov function has the
following form
V1 a11x1 a12 x 2
V2 a 21x1 a 22 x 2
The curl equation is
V1 V2
x 2
x1
a12
a 21
a12 x 2
a 21 x1
x2
x1
Slotine and Li, Applied Nonlinear Control
If the coefficients are choosen to be
a11=a22=1, a12=a21=0
which leads to
V1 x1
V2 x 2
Then
V x 2x 2 2x 2 1 x x
V
1
2
1 2
Thus, dV/dt is locally negative definite in the region (1-x1x2)>0. the function V
can be computed as
x12 x 22
V( x ) x1dx1 x 2dx 2
2
0
0
x1
x2
This is indeed positive definite, and therefore the asymptotic stability is
guaranteed.
Slotine and Li, Applied Nonlinear Control