Loop, Jmp, and Branch
advertisement

PPI
Programmable Peripheral Interface
Parallel port Interface
8255
8255 PPI
Addressing the 8255
A1 A0 = 00
= 01
= 10
= 11
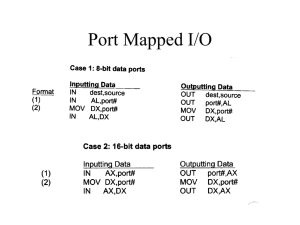
Port A ; IN, OUT 8 bits at a time
Port B ; IN, OUT 8 bits at a time
Port C ; IN, OUT 8 bits at a time
Control Register; Write ONLY!
Addressing Example
PORTA EQU 0224h
;Port A 8255
PORTB EQU 0225h
;Port B 8255
PORTC EQU 0226h
;Port C 8255
STAT EQU 0227h
;Control Port
Another Addressing Example A2A1(CPU)A1A0(PPI)
PORTA EQU 0224h
;Port A 8255
PORTB EQU 0226h
;Port B 8255
PORTC EQU 0228h
;Port C 8255
STAT EQU 022ah
;Control Port
Interfacing the 8255
20
8086
Address Only
A19
A18 Address/Data
A17 AD15 AD7
A16 AD14 AD6
AD13 AD5
+AD12 AD4
AD11 AD3
AD10 AD2
AD9 AD1
AD8 AD0
Address and Data lines
are multiplexed in the
8086
Address and Data Buses
20
8086
Address
Latch
20-bit address bus
ALE
16
Data Transceiver
ALE is Address Latch Enable
16-bit data bus
Addressing the 8255
IO/M
8-bit data bus
20-bit address bus
8
Data
Port A
RD
Port B
WR
RESET
A15
-A2
A1
A0
Logic
Circuit
CS
A1
A0
8
4
CH
{
Port
C
4
CL
Logic Circuit
• Inputs to the Logic Circuit
– address lines A15 - A2
(the I/0 address space is 216 addresses, and A1 and A0 are
used for the chip’s address lines)
– the 8086’s IO/M line
HIGH denotes an IO instruction (IN, OUT)
LOW denotes a memory access instruction (i.e., MOV)
• Output of the logic circuit
– a single low value from the 15 inputs (a NAND or OR gate)
to activate the Chip Select
• The connections for A15-A2 fix the chip’s address in I/O
space
8088 pins
The 8088 is a 16-bit
microprocessor:
Internal registers and
buses are 16 bits wide
8 address/data lines
12 addresslines
IO/M
RD and WR
Minimum mode
• In minimum mode, the 8086/8088 is the only
microprocessor in the circuit. It can assume that it has
control of memory, address, and data buses
• In maximum mode, the 8086/8088 is configured for
multiple microprocessors. The function of pins is changed
to provide processor-to-processor communication
Reset
• A single reset line is connected to all chips in the system
(8088/8086, 8255, 8253, etc.)
• Reset puts the chip in a known state
• Pushing the reset button on your computer generally
activates RES pin of 8284 that outputs a high Reset pulse
for a short period of time
• On Reset, the 8088/8086 goes to fixed addresses (ROM
chips) where boot sequence instructions are stored.
Basic Description of the 8255
• Its three I/O ports (labeled A,B, and C) are programmed in
groups of 12 pins :
• Group A connections consist of port A (PA7-PA0)
and the upper half of port C (PC7-PC4)
• Group B consists of port B (PB7-PB0) and the lower
half of port C(PC3-PC0)
• The 8255 is selected by its CS pin for programming, for
reading or writing to a port.
– Register selection is accomplished through the A1 and
A0 input pins, which select an internal register for
programming or operation
8255A PPI – Parallel I/O Interface
8255A PPI – Assets and Capabilities
• 24 I/O lines in 3 8-bit port groups – A, B, C
• A, B can be 8-bit input or output ports
• C can serve as 2 4-bit input or output ports
• 3 modes of operation:
– Mode 0: A, B, C simple input or output level sensitive ports
– Mode 1: A, B input or output ports with strobe control in C
– Mode 2: A is bidirectional with control/handshake in B and C
• A, B can only change 1 byte at a time
• C has individual bit set/reset capability
Advantage is non-dedicated circuit can change port
configuration with software and no “glue logic”
Mode Selection of the 8255
• Ports A, B, and C are used for I/O data.
– The control register is programmed to select the
operation mode of the three ports A, B, and C.
– Mode 0 : simple I/O mode
• Any of the ports A, B, CL and CU can be
programmed as input or output.
• No control of individual bits (all bits are out or all
bits are in)
– Mode 1 : Ports A and B can be used as input or output
ports with handshaking.
– Mode 2 : Port A can be used as bidirectional I/O port
with handshaking
PPI Interface to CPU
the PPI maps each of its 4 bytes
to an address, but all connect to
the same byte of the data bus; if
data bus is 1 byte wide, they are
consecutive addresses; if the bus
is 2 bytes wide, they are mapped
to alternate addresses; if the bus
is 4 bytes wide, …etc.
Programming/Controlling the PPI
• 8255A PPI has a “write-only” control register, accessed when PPI’s
A0=A1=1 (note: not A0 and A1 of the address bus!)
• When PPI is reset (by an active-high strobe on its RESET pin):
– Default is A, B, C are mode 0 input ports
• Control register also used to set/reset port C bits individually
PPI Programming Example
; Assume address decoder designed for PPI base address 0400h
; PPI is connected to D7-D0 on CPU data bus
mov
dh, 04h
mov
dl, 01h
mov
al, 82h
out
dx, al
What does the code shown above do????
Control Word Example
;Assume address decoder designed for PPI base address 0400h
;PPI connected to D7-D0 on CPU data bus
mov
dh,
04h
;Let dh point to base address
mov
dl,
03h
;Select the control register
mov
al,
82h
;Place 82h Control Word into al
out
dx,
al
;Write al contents to PPI
;explanation of operating mode set by this code
; D7=1
Control Word (not a bit set/reset command)
; D6D5=00
A and C7-C4 are Mode 0 (Group A)
; D4=0
A is Level Sensitive Output
; D3=0
C7-C4 are Level Sensitive Output
; D2=0
B and C3-C0 are Mode 0 (Group B)
; D1=1
B is Level Sensitive Input
; D0=0
C3-C0 are Level Sensitive Output
8255 Connection to Stepper Motor
HW#2
• Sketch the schematic diagram for a 8086 minimum system
that drives 8 seven segments through a PPI.
• PortA of PPI serves as the driver for the segments of a
digit. (PA0=a, PA1=b,..,PA6=g, PA7=‘.’;
• PortB of PPI serves as the digit selection
• Develop the SCAN Program.
– Input: AL (0 to 7) the digit that should be shown
– This routine is called every 10 ms
• Due Date: Sunday 22 Farvardin 1389