n - Department of Electrical Engineering & Computer Science
advertisement

Midterm Review
Jeff Edmonds
York University
Abstract Data Types
Positions and Pointers
Loop Invariants
System Invariants
Time Complexity
Classifying Functions
Adding Made Easy
Understand Quantifiers
Recursion
Balanced Trees
Heaps
Huffman Codes
Hash Tables
Graphs
Paradigms
COSC 20111
Midterm Review
• Review slides.
2
Midterm Review
• Review slides.
3
Midterm Review
• Review slides.
4
Midterm Review
• Review slides.
5
Midterm Review
• Review slides.
6
Midterm Review
• Review slides.
• Review the assignment notes and solutions!
7
Midterm Review
• Review slides.
• Review the assignment notes and solutions!
• Review 3101
• Steps0: Basic Math
• First Order Logic
• Time Complexity
• Logs and Exp
• Growth Rates
• Adding Made Easy
• Recurrence Relations
8
Midterm Review
• Review slides.
• Review the assignment notes and solutions!
• Review 3101
• Steps0: Basic Math
• Steps1: Loop Invariants
• Steps2: Recursion
9
Abstract Data Types
Abstractions (Hierarchy)
Elements
Sets
Lists, Stacks, & Queues
Trees
Graphs
Iterators
Abstract Positions/Pointers
Lecture 1
Jeff Edmonds
York University
COSC 2011
10
Software Engineering
• Software must be:
– Readable and understandable
• Allows correctness to be verified, and software to be easily updated.
– Correct and complete
• Works correctly for all expected inputs
– Robust
• Capable of handling unexpected inputs.
– Adaptable
• All programs evolve over time. Programs should be designed so that
re-use, generalization and modification is easy.
– Portable
• Easily ported to new hardware or operating system platforms.
– Efficient
• Makes reasonable use of time and memory resources.
James Elder
11
Abstraction
Abstract Data Types (ADTs)
• An ADT is a model of a data structure that specifies
– The type of data stored
– Operations supported on these data
• An ADT does not specify how the data are stored or how
the operations are implemented.
• The abstraction of an ADT facilitates
– Design of complex systems. Representing complex data
structures by concise ADTs, facilitates reasoning about and
designing large systems of many interacting data structures.
– Encapsulation/Modularity. If I just want to use an object / data
structure, all I need to know is its ADT (not its internal workings).
James Elder
Abstract Data Types
Restricted Data Structure:
Some times we limit what operation can be done
• for efficiency
• understanding
Stack: A list, but elements can only be
pushed onto and popped from the top.
Queue: A list, but elements can only be
added at the end and removed from
the front.
• Important in handling jobs.
Priority Queue: The “highest priority” element
is handled next.
13
Data Structures Implementations
• Array List
– (Extendable) Array
• Node List
– Singly or Doubly Linked List
• Stack
– Array
– Singly Linked List
• Queue
– Circular Array
– Singly or Doubly Linked List
• Priority Queue
– Unsorted doubly-linked list
– Sorted doubly-linked list
– Heap (array-based)
• Adaptable Priority Queue
– Sorted doubly-linked list with
location-aware entries
– Heap with location-aware entries
• Tree
– Linked Structure
• Binary Tree
– Linked Structure
– Array
14
Positions and Pointers
Abstract Positions/Pointers
Positions in an Array
Pointers in C
References in Java
Implementing Positions in Trees
Building Trees
Lecture 2
Jeff Edmonds
York University
COSC 2011
15
High Level Positions/Pointers
Positions: Given a data structure,
we want to have one or more current elements
that we are considering.
Conceptualizations:
• Fingers in pies
• Pins on maps
• Little girl dancing there
• Me
See Goodrich Sec 7.3 Positional Lists
16
Implementations of Positions/Pointers
Positions/Pointers: Now lets redo it in Java.
head .next .next
= head .next;
5
2182
element next
2039
2182
element next
2182
2039
head
The right hand side of the “=” specifies a memory location.
So does its left hand side.
The action is to put the value contained in the first
into the second.
17
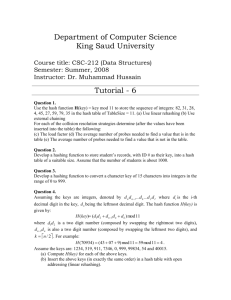
Implementing Positions in Trees
class LinkedBinaryTree {
class Node
{
E element;
Node parent;
Node left;
Node right;
}
private Node root = null;
tree
18
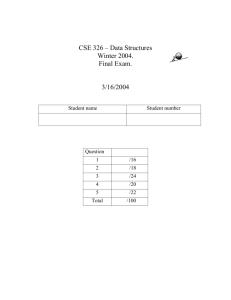
Implementing Positions in Trees
…
class LinkedBinaryTree {
tree
Position sibling(Position p) {
Node n=p;
if( n.parent != null )
if( n.parent.right = n )
return n.parent.left;
else
return n.parent.right;
else
} throw new IllegalArgumentException(“p is the root");
p1
p2
p3
}
At any time the user can move a position to the sibling.
p3 = tree.sibling(p2);
19
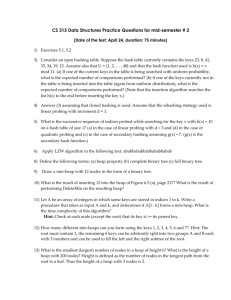
Implementing Positions in Trees
…
class LinkedBinaryTree {
tree
Position addRight(Position p,E e) {
Node n=p;
if( n.right = null )
n.right = new Node(e,n,null,null);
return n.right;
else
throw new IllegalArgumentException(
p1
p2
p3
Toronto
"p already has a right child");
}
At any time the user can add a position/node
to the right of a position.
p3 = tree.addRight(p2,“Toronto”);
20
Implementing Positions in Trees
class LinkedTree {
tree
Defining the class of trees
nodes can have many children.
We use the data structure Set or List
to store the Positions of a node’s
children.
21
Contracts, Assertions, and Invariants
Contracts
Assertions
Loop Invariants
The Sum of Objects
Insertion and Selection Sort
Binary Search Like Examples
Bucket (Quick) Sort for Humans
Reverse Polish Notation (Stack)
Whose Blocking your View (Stack)
Parsing (Stack)
Data Structure Invariants
Stack and Queue in an Array
Linked Lists
Lecture 3
Jeff Edmonds
York University
COSC 2011
22
On Step At a Time
Precondition
Postcondition
It can be difficult to understand
where computation go.
I implored you to not worry
about the entire computation.
0
i-1
next
i
Trust who passes you
the baton
and go around once
23
Iterative Algorithm with Loop Invariants
• Precondition:
What is true
about input
• Post condition:
What is true
about output.
24
Iterative Algorithm with Loop Invariants
Goal: Your goal is to prove that
• no matter what the input is,
as long as it meets the precondition,
• and no matter how many times your algorithm iterates,
as long as eventually the exit condition is met,
• then the post condition is guarantee to be achieved.
Proves that IF the program terminates then it works
<PreCond> & <code> <PostCond>
25
Iterative Algorithm with Loop Invariants
• Loop Invariant:
Picture of what is true at top of loop.
26
Iterative Algorithm with Loop Invariants
• Establishing the Loop Invariant.
• Our computation has just begun.
• All we know is that we have an input instance that
meets the Pre Condition.
• Being lazy, we want to do the minimum work.
• And to prove that it follows that the Loop Invariant is
then made true.
Establishing Loop Invariant
<preCond>
codeA
<loop-invariant>
27
Iterative Algorithm with Loop Invariants
• Maintaining the loop invariant
Exit
79 km
75 km
(while making progress)
• We arrived at the top of the loop knowing only
• the Loop Invariant is true
• and the Exit Condition is not.
• We must take one step (iteration)
(making some kind of progress).
• And then prove that the Loop Invariant will be
true when we arrive back at the top of the loop.
Maintaining Loop Invariant
Exit
<loop-invariantt>
¬<exit Cond>
codeB
<loop-invariantt+1>
28
Iterative Algorithm with Loop Invariants
• Obtain the Post Condition:
Exit
• We know the Loop Invariant is true
because we have maintained it.
We know the Exit Condition is true
because we exited.
• We do a little extra work.
• And then prove that it follows that the Post
Condition is then true.
Obtain the Post Condition
Exit
<loop-invariant>
<exit Cond>
codeC
<postCond>
29
Iterative Algorithm with Loop Invariants
• Precondition:
What is true
about input
• Post condition:
What is true
about output.
Insertion Sort
88 52
14
31
25 98
30
23
62
79
14,23,25,30,31,52,62,79,88,98
30
Iterative Algorithm with Loop Invariants
• Loop Invariant:
Picture of what is true at top of loop.
23,31,52,88
30 14
25 62
98
79
Sorted sub-list
31
Iterative Algorithm with Loop Invariants
• Making progress while
Maintaining the loop invariant
23,31,52,88
Exit
79 km
75 km
30 14
25 62
98
79
6 elements
to school
23,31,52,62,88
30 14
25
98
79
32
Iterative Algorithm with Loop Invariants
• Beginning & Ending
km
0 km
Exit
Exit
88 52
31
14
25 62 30
23
98
79
88 52
31
14
25 62 30
23
98
79
n elements
to school
0 elements
14,23,25,30,31,52,62,79,88,98
to school
14,23,25,30,31,52,62,79,88,98
33
Iterative Algorithm with Loop Invariants
• Running Time
= 1+2+3+…+n = (n2)
n
n
n
n
n
n
n+1 n+1
n+1
n+1 n+1
34
Iterative Algorithm with Loop Invariants
Define Problem
Define Loop
Invariants
Define Measure of
Progress
79 km
to school
Define Step
Define Exit Condition Maintain Loop Inv
Exit
Exit
Make Progress
Initial Conditions
Ending
Exit
79 km
75 km
km
0 km
Exit
Exit
35
Iterative Algorithm with Loop Invariants
Establishing Loop Invariant
<preCond>
codeA
<loop-invariant>
Maintaining Loop Invariant
Exit
<loop-invariantt>
¬<exit Cond>
codeB
<loop-invariantt+1>
Clean up loose ends
<loop-invariant>
<postCond>
<exit Cond>
Exit
codeC
Proves that IF the program terminates then it works
<PreCond> & <code> <PostCond>
36
Iterative Algorithm with Loop Invariants
• Precondition:
What is true
about input
• Post condition:
What is true
about output.
Binary Search
key 25
3
5
6
13 18 21 21 25 36 43 49 51 53 60 72 74 83 88 91 95
37
Iterative Algorithm with Loop Invariants
• Loop Invariant:
Picture of what is true at top of loop.
• If the key is contained in the original list,
then the key is contained in the sub-list.
key 25
3
5
6
13 18 21 21 25 36 43 49 51 53 60 72 74 83 88 91 95
38
Iterative Algorithm with Loop Invariants
• Making progress while
Maintaining the loop invariant
Exit
79 km
75 km
key 25
3
5
6
13 18 21 21 25 36 43 49 51 53 60 72 74 83 88 91 95
If key ≤ mid,
then key is in
left half.
If key > mid,
then key is in
right half.
39
Iterative Algorithm with Loop Invariants
• Running Time
The sub-list is of size n, n/2, n/4, n/8,…,1
Each step (1) time.
Total = (log n)
key 25
3
5
6
13 18 21 21 25 36 43 49 51 53 60 72 74 83 88 91 95
If key ≤ mid,
then key is in
left half.
If key > mid,
then key is in
right half.
40
Iterative Algorithm with Loop Invariants
• Beginning & Ending
km
0 km
Exit
Exit
key 25
3
5
6
13 18 21 21 25 36 43 49 51 53 60 72 74 83 88 91 95
41
Parsing with a Stack
Input: A string of brackets.
Output: Each “(”, “{”, or “[” must be paired
with a matching “)”, “}”, or “[”.
Loop Invariant: Prefix has been read.
• Matched brackets are matched and removed.
• Unmatched brackets are on the stack.
[( ) ( ( ) ) { }])
Stack
[((
Opening Bracket:
• Push on stack.
Closing Bracket:
• If matches that on stack
pop and match.
• else return(unmatched)
42
Data Structure Invariants
Dude! You have been teaching 3101 too long.
This is not an course on Algorithms,
but on Data Structures!
The importance of invariants is the same.
Differences:
1. An algorithm must terminate with an answer,
while systems and data structures may run
forever.
2. An algorithm gets its full input at the beginning,
while data structures gets a continuous stream
of instructions from the user.
•Both have invariants that must be maintained.
43
Data Structure Invariants
Maintaining Loop Invariant
Exit
InvariantsData Struc t
Push Operation
preCondPush
InvariantsData Struc t+1
postCondPush
Assume we fly in from Mars and InvariantsData Struc t is true:
Assume the user correctly calls the Push Operation:
preCondPush The input is info for a new element.
Implementer must ensure:
postCondPush The element is pushed on top of the stack.
InvariantsData Struc t+1
44
Data Structure Invariants
Maintaining Loop Invariant
Exit
InvariantsData Struc t
Push Operation
preCondPush
InvariantsData Struc t+1
postCondPush
top = top + 1;
A[top] = info;
45
Data Structure Invariants
Queue: Add and Remove
from opposite ends.
Algorithm dequeue()
if isEmpty() then
throw EmptyQueueException
else
info A[bottom]
bottom (bottom + 1) mod N
return e
46
Data Structure Invariants
InvariantsData Struc t
preCondPush
Don’t panic.
Just draw the pictures
and move the pointers.
postCondPush
InvariantsData Struc t+1
47
Data Structure Invariants
InvariantsData Struc t
preCondPush
postCondPush
InvariantsData Struc t+1
48
Data Structure Invariants
InvariantsData Struc t
Special Case: Empty
preCondPush
postCondPush
InvariantsData Struc t+1
49
Data Structure Invariants
InvariantsData Struc t
preCondRemove Rear
Is it so easy???
How about removing an
element from the rear?
last must point at the
second last element.
How do we find it?
You have to walk there from first!
time # of elements
instead of constant
postCondRemove Rear
InvariantsData Struc t+1
50
Data Structure Invariants
Stack: Add and Remove
from same end.
Actually, for a Stack
the last pointer is not needed.
Front
Rear
Add Element
Time Constant
Time Constant
Remove Element
Time Constant
Time n
51
Data Structure Invariants
Stack: Add and Remove
from same end.
Queue: Add and Remove
from opposite ends.
Front
Rear
Add Element
Time Constant
Time Constant
Remove Element
Time Constant
Time n
52
Data Structure Invariants
Doubly-linked lists allow more flexible list
nodes/positions
header
trailer
elements
Front
Rear
Add Element
Time Constant
Time Constant
Remove Element
Time Constant
Time n
Time Constant
53
Data Structure Invariants
Exit
54
Asymptotic Analysis of Time Complexity
History of Classifying Problems
Growth Rates
Time Complexity
Linear vs Constant Time
Binary Search Time (logn)
Insertion Sort Time (Quadratic)
Don't Redo Work
Test (linear) vs Search (Exponential)
Multiplying (Quadratic vs Exponential)
Bits of Input
Cryptography
Amortized Time Complexity
Worst Case Input
Classifying Functions (BigOh)
Adding Made Easy
Logs and Exponentials
Understand Quantifiers
Lecture 4
Jeff Edmonds
York University
COSC 2011
55
Some Math
Classifying Functions
f(i) = nQ(n)
Time
Time Complexity
t(n) = Q(n2)
Input Size
Adding Made Easy
∑i=1 f(i).
Logic Quantifiers
g "b Loves(b,g)
"b g Loves(b,g)
Logs and Exps
2a × 2b = 2a+b
2log n = n
Recurrence Relations
T(n) = a T(n/b) + f(n)
56
The Time Complexity of an Algorithm
• Specifies how the running time
• depends on the size of the input.
A function mapping
“size” of input
“time” T(n) executed .
Work for me to
give you the instance.
Work for you to
solve it.
57
History of Classifying Problems
Impossible
Mathematicians’ dream
Brute Force
(Infeasible)
Considered Feasible
Slow sorting
Fast sorting
Look at input
Binary Search
Time does not depend on input.
Halting
Computable
Exp = 2n
Poly = nc
Quadratic = n2
nlogn
Linear = n
log n
Constant
58
Growth Rates
2n
t
i
m
e
n2
n
log n
5
input size
Brute Force
(Infeasible)
Slow sorting
Look at input
Binary Search
Time does not depend on input.
Exp = 2n
Quadratic = n2
Linear = n
log n
Constant
59
Linear vs Constant Time
Search:
• Input: A linked list.
• Output: Find the end.
• Alg: Walk there.
• Time # of records = n.
Insert Front:
• Input: A linked list.
• Output: Add record to front.
• Alg: Play with pointers.
• Time = 4
60
Linear vs Constant Time
a Java Program J, an integer k,
" inputs I, Time(J,I) ≤ k
Is this “Constant time”
= O(1)?
Time
Yes because bounded
by a constant
• Time = 4 = Constant time = O(1)
Time does not “depend” on input.
n
61
Test vs Search
F
T
F
x1
x2
x3
AND
AND
F
OR
F
NOT
OR
F
F
OR
F
Test/Evaluate:
• Input: Circuit & Assignment
• Output: Value at output.
• Alg: Let values percolate down.
• Time: # of gates.
Search/Satisfiablity:
T
• Input: Circuit
• Output: An assignment
giving true:
• Alg: Try all assignments.
(Brute Force)
• Time: 2n
62
Running Time
Grade School
n2
********
********
********
********
********
********
********
********
********
********
****************
vs Kindergarten
a × b = a + a + a + ... + a
b
T(n) = Time multiply
T(n) = Time multiply
= θ(n2) = quadratic time.
= θ(b) = linear time.
Which is faster?
92834765225674897 × 838839775901103948759
63
Size of Input Instance
5
83920
1’’
2’’
•
•
•
•
Size of paper
# of bits
# of digits
Value
- n = 2 in2
- n = 17 bits
- n = 5 digits
- n = 83920
•
•
•
•
Intuitive
Formal
Reasonable
Unreasonable
# of bits = log2(Value)
Value = 2# of bits
64
The Time Complexity of an Algorithm
• Specifies how the running time
• depends on the size of the input.
A function mapping
“size” of input
“time” T(n) executed .
Work for me to
give you the instance.
Work for you to
solve it.
65
Running Time
Grade School
n2
********
********
********
********
********
********
********
********
********
********
****************
vs Kindergarten
a × b = a + a + a + ... + a
b
T(n) = Time multiply
T(n) = Time multiply
= θ(n2) = quadratic time.
= θ(b) = linear time.
Which is faster?
92834765225674897 × 8388397759011039475
b = value = 8388397759011039475
n = # digits = 20
Time ≈ 8388397759011039475 66
Time ≈ 202 ≈ 400
Running Time
Grade School
n2
********
********
********
********
********
********
********
********
********
********
****************
vs Kindergarten
a × b = a + a + a + ... + a
b
T(n) = Time multiply
T(n) = Time multiply
= θ(n2) = quadratic time.
= θ(b) = linear time.
Which is faster?
92834765225674897 × 8388397759011039475
b = value ≈ 10n
n = # digits = 20
n ≈ exponential!!!
2
Time
≈
10
Time ≈ 20 ≈ 400
67
Running Time
Grade School
n2
********
********
********
********
********
********
********
********
********
********
****************
vs Kindergarten
a × b = a + a + a + ... + a
b
T(n) = Time multiply
T(n) = Time multiply
= θ(n2) = quadratic time.
= θ(b) = linear time.
Which is faster?
92834765225674897 × 8388397759011039475 9
Adding a single digit
n = # digits = 20
multiplies the time by 10! 68
Time ≈ 202 ≈ 400
Time Complexity of Algorithm
The time complexity of an algorithm is
the largest time required on any input
of size n.
O(n2): Prove that for every input of size n,
the algorithm takes no more than cn2 time.
Ω(n2): Find one input of size n, for which the
algorithm takes at least this much time.
θ (n2): Do both.
69
Time Complexity of Problem
The time complexity of a problem is
the time complexity of the fastest algorithm
that solves the problem.
O(n2): Provide an algorithm that solves the
problem in no more than this time.
Ω(n2): Prove that no algorithm can solve it faster.
θ (n2): Do both.
70
Classifying Functions
Functions
nθ(1)
2θ(n)
Double Exp
(log n)θ(1)
25n <<
Exp
θ(1)
Exponential
Polynomial
Poly Logarithmic
Constant
5 << (log n)5 << n5 <<
n5
25n
2
2
<<
nθ(1)
2
2θ(n)
2
71
Classifying Functions
Polynomial = nθ(1)
?
Others
θ(n2)
Cubic
Quadratic
Linear
θ(n)
θ(n3)
θ(n4)
θ(n3 log7(n))
log(n) not absorbed
because not
Mult-constant
72
BigOh and Theta?
•5n2 + 8n + 2log n = Q(n2)
•5n2 log n + 8n + 2log n = Q(n2 log n)
Drop low-order terms.
Drop multiplicative constant.
73
Notations
Theta
f(n) = θ(g(n))
f(n) ≈ c g(n)
BigOh
f(n) = O(g(n))
f(n) ≤ c g(n)
Omega
f(n) = Ω(g(n))
f(n) ≥ c g(n)
Little Oh
f(n) = o(g(n)) f(n) << c g(n)
Little Omega
f(n) = ω(g(n)) f(n) >> c g(n)
74
Definition of Theta
f(n) = θ(g(n))
c1, c2, n0, " n n0, c1 g( n) f ( n ) c2 g( n)
75
Definition of Theta
f(n) = θ(g(n))
c1, c2, n0, " n n0, c1 g( n) f ( n ) c2 g( n)
f(n) is sandwiched between c1g(n) and c2g(n)
76
Definition of Theta
f(n) = θ(g(n))
c1, c2, n0, " n n0, c1 g( n) f ( n ) c2 g( n)
f(n) is sandwiched between c1g(n) and c2g(n)
for some sufficiently small c1 (= 0.0001)
for some sufficiently large c (= 1000)
77
Definition of Theta
f(n) = θ(g(n))
c1, c2, n0, " n n0, c1 g( n) f ( n ) c2 g( n)
For all sufficiently large n
78
Definition of Theta
f(n) = θ(g(n))
c1, c2, n0, " n n0, c1 g( n) f ( n ) c2 g( n)
For all sufficiently large n
For some definition of “sufficiently large”
79
Adding Made Easy
Arithmetic Sum
Gauss
∑i=1..n i = 1 + 2 + 3 + . . . + n
= Q(# of terms · last term)
n
n
n
n
n
n
80
Adding Made Easy
Arithmetic Sum
Gauss
∑i=1..n i = 13 + 23 + 33 + . . . + n3
= Q(# of terms · last term)
True when ever terms increase slowly
81
Adding Made Easy
Geometric Increasing
∑i=0..n
=
ri = r0 + r1 + r2 +. . . + rn
Q(biggest term)
82
Adding Made Easy
• Geometric Like: If f(n) 2Ω(n),
then ∑i=1..n f(i) = θ(f(n)).
• Arithmetic Like: If f(n) = nθ(1)-1, then ∑i=1..n f(i) = θ(n · f(n)).
• Harmonic:
If f(n) = 1/n ,
then ∑i=1..n f(i) = logen + θ(1).
• Bounded Tail:
If f(n) n-1-Ω(1), then ∑i=1..n f(i) = θ(1).
(For +, -, , , exp, log
functions f(n))
This may seem confusing, but it is really not.
It should help you compute most sums easily.
83
Logs and Exp
• properties of logarithms:
logb(xy) = logbx + logby
logb (x/y) = logbx - logby
logbxa = alogbx
logba = logxa/logxb
• properties of exponentials:
a(b+c) = aba c
abc = (ab)c
ab /ac = a(b-c)
b = a logab
bc = a c*logab
84
Understand Quantifiers!!!
Say, I have a game for you.
We will each choose an integer.
You win if yours is bigger.
I am so nice, I will even let you go first.
Easy.
I choose a trillion trillion.
Well done. That is big!
But I choose a trillion trillion and one
so I win.
85
Understand Quantifiers!!!
You laugh but this is
a very important game
in theoretical computer science.
You choose the size of your Java program.
Then I choose the size of the input.
Likely |I| >> |J|
So you better be sure your Java program
can handle such long inputs.
86
Understand Quantifiers!!!
The first order logic we can state
that I win the game:
"x, y, y>x
The proof:
Let x be an arbitrary integer.
Let y = x+1
Note y = x+1 >x
Good game.
Let me try again. I will win this time!
87
Understand Quantifiers!!!
Sam
One politician
Bob
John
Layton
Fred
politician, "voters, Loves(v, p)
"voters, politician, Loves(v, p)
Sam
Could be a
different politician.
Bob
Harper
John
Layton
Fred
88
Understand Quantifiers!!!
“There is a politician that is loved by everyone.”
This statement is “about” a politician.
The existence of such a politician.
We claim that this politician is “loved by everyone”.
Sam
Bob
John
Layton
Fred
politician,["voters, Loves(v, p) ]
"voters,[ politician, Loves(v, p) ]
Sam
“Every voter loves some politician.”
This statement is “about” voters.
Something is true about every voter.
We claim that he “loves some politician.”
Bob
Harper
John
Layton
Fred
89
Understand Quantifiers!!!
A Computational Problem P states
•for each possible input I
•what the required output P(I) is.
Eg: Sorting
An Algorithm/Program/Machine M is
•a set of instructions
(described by a finite string “M”)
•on a given input I
•follow instructions and
•produces output M(I)
•or runs for ever.
Eg: Insertion Sort
90
Understand Quantifiers!!!
Problem P is
computable if
M, "I, M(I)=P(I)
There exists is a single algorithm/machine
that solves P for every input
Play the following game to prove it!
91
Understand Quantifiers!!!
Problem P is
computable if
M, "I, M(I)=P(I)
Two players:
a prover and a disprover.
92
Understand Quantifiers!!!
Problem P is
computable if
M, "I, M(I)=P(I)
They read the statement left to right.
I produce the object when it is a .
I produce the object when it is a ".
I can always win
if and only if
statement is true.
The order the players go
REALY matters.
93
Understand Quantifiers!!!
Problem P is
computable if
M, "I, M(I)=P(I)
I have a machine M that I
claim works.
Oh yeah, I have an input I for
which it does not.
I win if M on input I gives
the correct output
What we have been doing all along.
94
Understand Quantifiers!!!
Problem P is
computable if
M, "I, M(I)=P(I)
Problem P is
uncomputable if
"M, I, M(I) P(I)
I have a machine M that I
claim works.
I find one counter example
input I for which
his machine M fails us.
I win if M on input I gives
the wrong output
Generally very hard to do.
95
Understand Quantifiers!!!
Problem P is
Problem P is
uncomputable if true
true computable if
M, "I, M(I)=Sorting(I) "M, I, M(I) Halting(I)
"I, M, M(I) =Halting(I)
The order the players go
REALY matters.
If you don’t know if it is
true or not, trust the game.
96
Understand Quantifiers!!!
Problem P is
Problem P is
uncomputable if true
true computable if
M, "I, M(I)=Sorting(I) "M, I, M(I) Halting(I)
"I, M, M(I) =Halting(I) true
I give you an input I.
Given I either
A tricky
one.
Halting(I) = yes or
Halting(I) = no.
"I, Myes(I) says yes
"I, Mno(I) says no
I don’t know which, but
one of these does the trick.
97
Understand Quantifiers!!!
• Problem P is computable in polynomial time.
M, c, n0,"I, M(I)=P(I) & (|I| < n0 or Time(M,I) ≤ |I|c)
•Problem P is not computable in polynomial time.
" M, c, n0, I, M(I)≠P(I) or (|I| ≥ n0 & Time(M,I) > |I|c)
• Problem P is computable in exponential time.
M, c, n0,"I, M(I)=P(I) & (|I| < n0 or Time(M,I) ≤ 2c|I|)
•The computational class “Exponential Time"
is strictly bigger than the computational
class “Polynomial Time”.
P, [" M, c, n0, I, M(I)≠P(I) or (|I| ≥ n0 & Time(M,I) > |I|c)]
& [ M, c, n0,"I, M(I)=P(I) & (|I| < n0 or Time(M,I) ≤ 2c|I|)]
98
Recursion
Jeff Edmonds
York University
Lecture 5
One Step at a Time
Stack of Stack Frames
Friends and Strong Induction
Recurrence Relations
Towers of Hanoi
Check List
Merge & Quick Sort
Simple Recursion on Trees
Binary Search Tree
Things not to do
Heap Sort & Priority Queues
Trees Representing Equations
Pretty Print
Parsing
Iterate over all s-t Paths
Recursive Images
Ackermann's Function
COSC 2011
99
On Step At a Time
Precondition
Postcondition
It can be difficult to understand
where computation go.
I implored you to not worry
about the entire computation.
Strange(x,y):
x1 = x/4; y1 = 3y; f1 = Strange( x1, y1 );
x2 = x - 3x1; y2 = y; f2 = Strange( x2, y2 );
return( f1+f2 );
next
x/4 3y
(x-3x1) y
100
Friends & Strong Induction
Strange(x,y):
If x < 4 then return( xy );
x1 = x/4; y1 = 3y;? f1 = Strange( x1, y1 ); •Know Precond: ints x,y
Postcond: ???
x2 = x - 3x1; y2 = y; f2 = Strange( x2, y2 );
return( f1+f2 );
x = 30; y = 5
x1 = 7; y1 = 15
f1 = 105
x2 = 9; y2 = 5
f2 = 45
return 150
X=7
Y = 15
XY = 105
X=9
Y=5
XY = 45
•Consider your input instance
•If it is small enough solve it on your own.
•Allocate work
–Construct one or more sub-instances
• It must be smaller
• and meet the precondition
–Assume by magic your friends
give you the answer for these.
•Use this help to solve your own instance.
•Do not worry about anything else.
– Micro-manage friends by tracing out what
they and their friend’s friends do.
101
– Who your boss is.
Recurrence Relations
Time of Recursive Program
T(1) = 1
T(n) = a T(n/b) + nc
procedure Eg(In)
n = |In|
if(n1) then
• n is the “size” of our input.
• a is the number of “friends”
put “Hi”
• n/b is the “size” of friend’s input.
else
c is the work I personally do.
•
n
c
loop i=1..n
put “Hi”
loop i=1..a
In/b = In cut in b pieces
Eg(In/b)
102
T(n)
n/2
n/2
n/4
n/4
n/4
n
=
n/4
n/4
n/4
n/4
n/2
n/4
n/4
n/4
n/4
n/2
n/4
n/4
n/4
n/4
n/4
11111111111111111111111111111111 . . . . ……………………... . 111111111111111111111111111111111
103
Evaluating: T(n) = aT(n/b)+f(n)
Level
Instance
size
Work
in stack
frame
# stack
frames
Work in
Level
1 · f(n)
a · f(n/b)
0
1
n
f(n)
n/b
f(n/b)
1
a
2
n/b2
f(n/b2)
a2
a2 · f(n/b2)
i
n/bi
f(n/bi)
ai
ai · f(n/bi)
h = log n/log b
n/bh
T(1)
log a/
log b
n
log a/
log b ·
n
T(1)
Total Work T(n) = ∑i=0..h ai×f(n/bi)
104
Evaluating: T(n) = aT(n/b)+f(n)
105
Evaluating: T(n) = aT(n/b) + nc
= 4T(n/2) + n
Time for top level: n = n1 c = 1 log 4
log a/
/log 2
log b
) = θ(n2)
) = θ(n
Time for base cases: θ(n
Dominated?: c = 1 < 2 = log a/log b
Hence, T(n) == ?θ(base cases) = θ(n
log a/
log b
) = θ(n2).
If we reduce the number of friends from 4 to 3
is the savings just 25%?
106
Evaluating: T(n) = aT(n/b) + nc
= 3T(n/2) + n
Time for top level: n = n1 c = 1 log 3
log a/
/log 2
log b
) = θ(n1.58)
) = θ(n
Time for base cases: θ(n
Dominated?: c = 1 < 1.58 = log a/log b
Hence, T(n) == ?θ(base cases) = θ(n
log a/
log b
) = θ(n1.58).
Not just a 25% savings!
θ(n2) vs θ(n1.58..)
107
Evaluating: T(n) = aT(n/b) + nc
= 3T(n/2) + n2
Time for top level: n2, c=2
log 3/
log a/
log 2
log b
θ(n
) = θ(n1.58)
)=
Time for base cases: θ(n
Dominated?: c = 2 > 1.58 = log a/log b
Hence, T(n) == ?θ(top level) = θ(n2).
108
Evaluating: T(n) = aT(n/b) + nc
= 3T(n/2) + n1.58
Time for top level: n1.58, c=1.58
log 3/
log a/
log 2
log b
θ(n
) = θ(n1.58)
)=
Time for base cases: θ(n
Dominated?: c = 1.58 = log a/log b
Hence, all θ(logn) layers require a total of θ(n1.58) work.
The sum of these layers is no longer geometric.
Hence T(n) = θ(n1.58 logn)
109
Evaluating: T(n) = aT(n/b)+f(n)
Level
Instance
size
Work
in stack
frame
# stack
frames
Work in
Level
1 · f(n)
a · f(n/b)
0
1
n
f(n)
n/b
f(n/b)
1
a
2
n/b2
f(n/b2)
a2
a2 · f(n/b2)
i
n/bi
f(n/bi)
ai
ai · f(n/bi)
h = log n/log b
n/bh
T(1)
log a/
log b
n
log a/
log b ·
n
T(1)
All levels the same: Top Level to Base Cases
110
Evaluating: T(n) = aT(n/b)+f(n)
111
Check Lists for Recursive Programs
This is the format of “all” recursive programs.
Don’t deviate from this.
Or else!
112
Merge Sort
88 52
14
31
25 98
30
23
62
79
Get one friend to
sort the first half.
25,31,52,88,98
Split Set into Two
(no real work)
Get one friend to
sort the second half.
14,23,30,62,79
113
Merge Sort
Merge two sorted lists into one
25,31,52,88,98
14,23,25,30,31,52,62,79,88,98
14,23,30,62,79
114
Java Implementation
115
Andranik Mirzaian
115
Java Implementation
116
Andranik Mirzaian
116
Quick Sort
Partition set into two using
randomly chosen pivot
88 52
14
31
25 98
30
23
62
79
14
31 30 23
25
88
≤ 52 ≤
98
62
79
117
Quick Sort
14
31 30 23
25
Get one friend to
sort the first half.
14,23,25,30,31
88
≤ 52 ≤
98
62
79
Get one friend to
sort the second half.
62,79,98,88
118
Quick Sort
14,23,25,30,31
52
62,79,98,88
Glue pieces together.
(No real work)
14,23,25,30,31,52,62,79,88,98
Faster Because all done
“in place”
ie in the input array
119
Java Implementation
120
Andranik Mirzaian
120
Recursion on Trees
(define)
A binary tree is:
- the empty tree
- a node with a right and a left sub-tree.
3
8
1
3
6
2
2
5
4
7
9
1
121
Recursion on Trees
(friends)
number of nodes = ?
Get help from friends
5
3
6
8
1
3
6
2
2
5
4
7
9
1
122
Recursion on Trees
(friends)
number of nodes
= number on left + number on right + 1
= 6 + 5 + 1 = 12
5
3
6
8
1
3
6
2
2
5
4
7
9
1
123
Recursion on Trees
(base case)
number of nodes
Base Case ?
3
8
1
3
6
2
2
0
5
4
7
Base case!
9
1
124
Recursion on Trees(communication
Being lazy, I will only consider
my root node and my communication with my friends.
I will never look at my children subtrees
but will trust them to my friends.
3
6
8
1
3
6
2
2
5
4
7
9
1
125
Recursion on Trees
(code)
126
Recursion on Trees
(cases)
Designing Program/Test Cases
Try same code
n 1 + n2 + 1
n1+0+1
3
3
Same code
works!
n1
generic
n2
generic
Try same code
0+0+1=1
3
Same code
works!
0
0
0
n1
generic
0
Base Case
127
Recursion on Trees
Time: T(n) =
=
(time)
∑stack frame Work done by stack frame
Q(n)
×
Q(1) =
Q(n)
One stack frame
•for each node in the tree
•and for empty trees hang off
And constant work per stack frame.
128
Recursion on
(mult-children)
Trees (friends)
Many Children
number of nodes = 4 + 2 + 4 + 2 + 1 = 13
One friend for each sub-tree.
2
3
4
1
3
4
2
8
5
2
2
7
6
1
4
4
9
129
Recursion on
(mult-children)
Trees (cases)
Designing Program/Test Cases
n 1 + n2 + n3 + 1
n1 + 1 Try same code
3
3
Same code works!
n1
n2
n3
generic
generic
generic
n1
generic
But is this needed
Try same code
+1=1
3
Same code works!
(if not the input)
0
130
Recursion on
(mult-children)
Trees (code)
131
Recursion on
Time: T(n) =
=
(mult-children)
Trees (time)
∑stack frame Work done by stack frame
∑stack frame Q(# subroutine calls)
= ∑node Q(# edge in node)
=Q(edgeTree) = Q(nodeTree) =Q(n)
132
Recursion on Trees
class LinkedBinaryTree {
class Node
{
E element;
Node parent;
Node left;
Node right;
}
Node root = null;
Tree
We pass the recursive
program a “binary tree”.
But what type is it really?
This confused Jeff at first.
133
Recursion on Trees
class LinkedBinaryTree {
class Node
{
E element;
Node parent;
Node left;
Node right;
}
Node root = null;
Tree
(LinkedBinaryTree tree)
One would think tree is of
type LinkedBinaryTree.
Then getting its left subtree,
would be confusing.
left_Tree
134
Recursion on Trees
class LinkedBinaryTree {
class Node
{
E element;
Node parent;
Node left;
Node right;
}
Node root = null;
Tree
(LinkedBinaryTree tree)
One would think tree is of
type LinkedBinaryTree.
Then getting its left subtree,
would be confusing.
left_Tree
135
Recursion on Trees
class LinkedBinaryTree {
class Node
{
E element;
Node parent;
Node left;
Node right;
}
Node root = null;
Tree
(Node tree)
It is easier to have tree be of
type Node.
But it is thought of as the
subtree rooted at the node
pointed at.
The left child is then tree.left or
or
tree
Tree.leftSub(tree)
tree.Getleft()
or
leftSub(tree)
136
Recursion on Trees
class LinkedBinaryTree {
class Node
{
E element;
Node parent;
Node left;
Node right;
}
Node root = null;
Tree
tree
private int NumberNodesRec (Node tree)
public int NumberNodes() {
return NumberNodesRec( root );
}
NumberNodesRec
NumberNodesRec
But the outside user does not
know about pointers to nodes.
137
Balanced Trees
Dictionary/Map ADT
Binary Search Trees
Insertions and Deletions
AVL Trees
Rebalancing AVL Trees
Union-Find Partition
Heaps & Priority Queues
Communication & Hoffman Codes
(Splay Trees)
Lecture 6
Jeff Edmonds
York University
COSC 2011
138
Input
key, value
k1,v1
k2,v2
k3,v3
k4,v4
Dictionary/Map ADT
Problem: Store value/data
associated with keys.
Examples:
• key = word, value = definition
• key = social insurance number
value = person’s data
139
Input
key, value
k1,v1
k2,v2
k3,v3
k4,v4
Dictionary/Map ADT
Array
Problem: Store value/data
associated with keys.
0
1
2
3
4
k5,v5
5
6
7
Unordered Array
…
Implementations:
Insert
Search
O(1)
O(n)
140
Input
key, value
2,v3
4,v4
7,v1
9,v2
Dictionary/Map ADT
Array
0
1
2
Problem: Store value/data
associated with keys.
6,v5
3
4
5
6
7
Unordered Array
Ordered Array
…
Implementations:
Insert
O(1)
O(n)
Search
O(n)
O(logn)
141
6,v5
entries
Implementations:
Problem: Store value/data
associated with keys.
trailer
nodes/positions
2,v3
4,v4
7,v1
9,v2
Dictionary/Map ADT
header
Input
key, value
Insert
Search
Unordered Array
O(1)
O(n)
Ordered Array
O(n)
O(logn)
Ordered Linked List
O(n)
O(n)
Inserting is O(1) if you have the spot.
but O(n) to find the spot.
142
Input
key, value
2,v3
4,v4
7,v1
9,v2
Dictionary/Map ADT
Problem: Store value/data
associated with keys.
38
25
17
51
31
42
63
4 21 28 35 40 49 55 71
Implementations:
Unordered Array
Ordered Array
Binary Search Tree
Insert
O(1)
O(n)
O(logn)
Search
O(n)
O(logn)
O(logn)
143
Input
key, value
Dictionary/Map ADT
2,v3
4,v4
7,v1
9,v2
Implementations:
Problem: Store value/data
associated with keys.
Heaps are good
for Priority Queues.
Insert
Unordered Array
O(1)
Ordered Array
O(n)
Binary Search Tree
O(logn)
Heaps
Faster: O(logn)
Search
O(n)
O(logn)
O(logn)
O(n)
Max O(1)
144
Input
key, value
2,v3
4,v4
7,v1
9,v2
Dictionary/Map ADT
Problem: Store value/data
associated with keys.
Hash Tables are very fast,
but keys have no order.
Implementations:
Insert
Unordered Array
O(1)
Ordered Array
O(n)
Binary Search Tree
O(logn)
Heaps
Faster: O(logn)
Hash Tables
Avg: O(1)
Search
O(n)
O(logn)
O(logn)
Max O(1)
O(1)
Next
O(1)
O(1)
O(n)
(Avg)
145
Balanced Trees
Unsorted
List
Sorted
List
Balanced
Trees
Splay
Trees
(Static)
•Search
O(n)
Heap
Hash
Tables
(Priority
Queue) (Dictionary)
Worst case
O(n)
O(log(n))
O(log(n)) Practice O(log(n)) O(1)
•Insert
•Delete
O(1)
O(n)
O(n)
•Find Max
O(n)
O(1)
O(log(n))
O(1)
O(n)
•Find Next
in Order
O(n)
O(1)
O(log(n))
O(n)
O(n)
better
O(log(n))
Amortized
O(1)
better
146
From binary search to
Binary Search Trees
147
Binary Search Tree
All nodes in left subtree ≤ Any node ≤ All nodes in right subtree
38
≤
25
≤
17
4
51
31
21
28
42
35
40
63
49
55
71
Iterative Algorithm
Move down the tree.
Loop Invariant:
If the key is contained in the original tree,
then the key is contained in the sub-tree
rooted at the current node.
Algorithm TreeSearch(k, v)
v = T.root()
loop
if T.isExternal (v)
return “not there”
if k < key(v)
v = T.left(v)
else if k = key(v)
return v
else { k > key(v) }
v = T.right(v)
end loop
38
key 17
25
51
17
4
31
21
28
42
35
40
63
49
55
71
Recursive Algorithm
If the key is not at the root, ask a friend to look for it in the
appropriate subtree.
Algorithm TreeSearch(k, v)
if T.isExternal (v)
key 17
return “not there”
if k < key(v)
return TreeSearch(k, T.left(v))
else if k = key(v)
17
return v
else { k > key(v) }
return TreeSearch(k, T.right(v))
4
38
25
51
31
21
28
42
35
40
63
49
55
71
Insertions/Deletions
To insert(key, data):
Insert 10
1
We search for key.
v
3
2
Not being there,
we end up in an empty tree.
11
9
w
8
10
4
6
5
12
7
Insert the key there.
Insertions/Deletions
To Delete(keydel, data):
Delete 4
1
If it does not have two children,
v
3
point its one child at its parent.
2
11
9
w
keydel
8
10
4
6
5
>
7
12
Insertions/Deletions
To Delete(keydel, data):
Delete 3
else find the next keynext in order
keydel
1
3
right left left left …. to empty tree
2
11
9
w
keynext
8
10
4
6
5
>
7
12
Replace keydel to delete with keynext
point keynext’s one child at its parent.
Performance
find, insert and remove take O(height) time
In a balanced tree, the height is O(log n)
In the worst case, it is O(n)
Thus it worthwhile to balance the tree (next topic)!
AVL Trees
AVL trees are “mostly” balanced.
Tree is said to be an AVL Tree if and only if
heights of siblings differ by at most 1.
balanceFactor(v)
= height(rightChild(v)) - height(leftChild(v))
{ -1,0,1 }.
Claim: The height of an AVL tree storing n keys is ≤ O(log n).
balanceFactor = 2-3 = -1 44
subtree
height
2
subtree
height
17
32
78
88
50
48
3
62
Rebalancing after an Insertion
Cases
y £x£z
x£y £z
+2
height
=h
h-1
h-2
x
+1
y
h-3
T1
one is h-3 & one is h-4
h-1
T3
height
=h
z
-1
y
h-2
h-3
T2
T0
h-3
+2
height
=h
z
z£y £x
h-3
T3
T0
z£x£y
-2
height
=h
z
-1
y
h-3
h-1
T0
x
x
h-3
-2
z
+1
y
h-3
x
h-2
h-2
T1
T0
T1
T2
one is h-3 & one is h-4
h-1
h-3
T3
T2
T3
one is h-3 & one is h-4
T1
T2
one is h-3 & one is h-4
Rebalancing after an Insertion
Inserting new leaf 6 in to AVL tree
+2
7
-1
4
3
Problem!
8
-1
5
0
6
balanceFactor
Increases heights
along path from leaf to root.
Rebalancing after an Insertion
Inserting new leaf 6 in to AVL tree
+2
7
-1
4
3
Problem!
8
-1
5
Denote
6
z = the lowest imbalanced node
y = the child of z with highest subtree
x = the child of y with highest subtree
Rebalancing after an Insertion
Inserting new leaf 6 in to AVL tree
z
y≤x≤z
y
T4
x
T1
z
T2
T3
x
y
Rebalancing after an Insertion
Inserting new leaf 6 in to AVL tree
z
x
y≤x≤z
y
T4
x
T1
z
T2
T3
x
y
y
z
Rebalancing after an Insertion
Inserting
new leaf 6 in to AVL tree
Rest of Tree
Rest of Tree
z
x
z
y
y
T4
x
T1
T1
T2
T3
T2
T3
T4
• This subtree is balanced.
• And shorter by one.
• Hence the whole is an AVL Tree
Rebalancing after an Insertion
Example: Insert 12
5
7
3
2
1
1
3
13
2
3
2
9
1
4
0
0
1
11
0
0
0
2
31
1
15
1
8
0
0
4
19
0
1
23
0
0
0
0
0
0
162
Rebalancing after an Insertion
Example: Insert 12
5
7
3
2
1
1
3
13
2
3
2
9
1
4
0
0
1
11
0
0
0
2
31
1
15
1
8
0
0
4
19
0
1
23
0
0
w
0
0
0
0
Step 1.1: top-down search
163
Rebalancing after an Insertion
Example: Insert 12
5
7
3
2
1
1
3
13
2
3
2
9
1
4
0
0
0
0
0
1 w
12
0
1
23
0
1
11
0
0
2
31
1
15
1
8
0
0
4
19
0
0
0
0
Step 1.2: expand 𝒘 and insert new item in it
164
Rebalancing after an Insertion
Example: Insert 12
5
7
3
2
1
1
4
13
2
3
1
4
0
0
0
0
4
19
0
3
1
imbalance
9
15
2
1
11
8
0
0
1 w
12
0
0 0
0
2
31
1
23
0
0
0
0
Step 2.1: move up along ancestral path of 𝒘; update
ancestor heights; find unbalanced node.
165
Rebalancing after an Insertion
Example: Insert 12
5
7
3
2
1
1
4
z
13
2
3
3
y 9
1
4
0
0
0
1
0
0
2
31
1
15
2
x 11
1
8
0
0
4
19
0
0
1
23
0
0
0
0
0
12
0
Step 2.2: trinode discovered (needs double rotation)
166
Rebalancing after an Insertion
Example: Insert 12
5
7
3
2
1
1
3
x
11
2
3
2
y 9
1
4
0
0
1
8
0
0
1
4
19
2
31
2
13 z
1
23
0
1
15
12
0
0
0
0
0
0
00
0
Step 2.3: trinode restructured; balance restored. DONE!
167
0
Rebalancing after a deletion
Very similar to before.
Unfortunately, trinode restructuring may
reduce the height of the subtree, causing
another imbalance further up the tree.
Thus this search and repair process must
in the worst case be repeated until we
reach the root.
See text for implementation.
Midterm Review
End
169
Union-Find Data structure.
Average Time = Akerman’s-1(E)
4
170
Heaps, Heap Sort, &
Priority Queues
J. W. J. Williams, 1964
171
Abstract Data Types
Restricted Data Structure:
Some times we limit what operation can be done
• for efficiency
• understanding
Stack: A list, but elements can only be
pushed onto and popped from the top.
Queue: A list, but elements can only be
added at the end and removed from
the front.
• Important in handling jobs.
Priority Queue: The “highest priority” element
is handled next.
172
Priority Queues
Sorted
List
Unsorted
List
Heap
•Items arrive
with a priority.
O(n)
O(1)
O(logn)
•Item removed is
that with highest
priority.
O(1)
O(n)
O(logn)
173
Heap Definition
•Completely Balanced Binary Tree
•The value of each node
each of the node's children.
•Left or right child could be larger.
Where can 9 go?
Where can 1 go?
Where can 8 go?
Maximum is at root.
174
Heap Data Structure
Completely Balanced Binary Tree
Implemented by an Array
175
Heap
Pop/Push/Changes
With Pop, a Priority Queue
returns the highest priority data item.
This is at the root.
21
21
176
Heap
Pop/Push/Changes
But this is now the wrong shape!
To keep the shape of the tree,
which space should be deleted?
177
Heap
Pop/Push/Changes
What do we do with the element that was there?
Move it to the root.
3
3
178
Heap
Pop/Push/Changes
But now it is not a heap!
The left and right subtrees still are heaps.
3
3
179
Heap
Pop/Push/Changes
But now it is not a heap!
The 3 “bubbles” down until it finds its spot.
3
The max of these
three moves up.
3
Time = O(log n)
180
Heap
Pop/Push/Changes
When inserting a new item,
to keep the shape of the tree,
which new space should be filled?
21
21
181
Heap
Pop/Push/Changes
But now it is not a heap!
The 21 “bubbles” up until it finds its spot.
30
The max of these
two moves up.
30
21
21
Time = O(log n)
182
Adaptable Heap
Pop/Push/Changes
But now it is not a heap!
The 39 “bubbles” down or up until it finds its spot.
27
2139
39
21 c
Suppose some outside user
knows about
some data item c
and remembers where
it is in the heap.
And changes its priority
from 21 to 39
183
Adaptable Heap
Pop/Push/Changes
But now it is not a heap!
The 39 “bubbles” down or up until it finds its spot.
39
27
27 f
39
21 c
Suppose some outside user
also knows about
data item f and its location
in the heap just changed.
The Heap must be able
to find this outside user
and tell him it moved.
Time = O(log n)
184
Heap Implementation
• A location-aware heap entry
is an object storing
2 d
4 a
6 b
key
value
position of the entry in the
underlying heap
• In turn, each heap position
stores an entry
• Back pointers are updated
during entry swaps
Last Update: Oct 23,
2014
8 g
Andy
5 e
9 c
185
185
Selection Sort
Selection
Largest i values are sorted on side.
Remaining values are off to side.
3
Exit
79 km
Exit
75 km
5
1
4
<
6,7,8,9
2
Max is easier to find if a heap.
186
Heap Sort
Largest i values are sorted on side.
Remaining values are in a heap.
Exit
79 km
Exit
75 km
187
Communication & Entropy
Use a Huffman Code
described by a binary tree.
001000101
Claude Shannon
(1948)
I first get
, the I start over to get
0
0
0
0
1
1
1
0
0
1
1
0
1
0
1
1
0
1
0
1
188
Communication & Entropy
Objects that are more likely
will have shorter codes.
I get it.
I am likely to answer .
so you give it a 1 bit code.
Claude Shannon
(1948)
0
0
0
0
1
1
1
0
0
1
1
0
1
0
1
1
0
1
0
1
189
Hash Tables
Dictionary/Map ADT
Direct Addressing
Hash Tables
Random Algorithms and Hash
Functions
Key to Integer
Separate Chaining
Probe Sequence
Put, Get, Del, Iterators
Running Time
Simpler Schemes
Lecture 7
Jeff Edmonds
York University
COSC 2011
190
Random Balls in Bins
Throw m/2 balls (keys)
randomly
into m bins (array cells)
The balls get spread out reasonably well.
- Exp( # a balls a ball shares a bin with ) = O(1)
- O(1) bins contain O(logn) balls.
191
Input
key, value
k1,v1
k2,v2
k3,v3
k4,v4
Dictionary/Map ADT
Problem: Store value/data
associated with keys.
Examples:
• key = word, value = definition
• key = social insurance number
value = person’s data
192
Dictionary/Map ADT
• Map ADT methods:
– put(k, v): insert entry (k, v) into the map M.
• If there is a previous value associated with k return it.
• (Multi-Map allows multiple values with same key)
– get(k): returns value v associated with key k. (else null)
– remove(k): remove key k and its associated value.
– size(), isEmpty()
– Iterator:
• keys(): over the keys k in M
• values(): over the values v in M
• entries(): over the entries k,v in M
193
Input
Dictionary/Map ADT
key, value Array
k1,v1
k2,v2
k3,v3
k4,v4
Problem: Store value/data
associated with keys.
0
1
2
3
4
k5,v5
5
6
7
…
Implementations:
Unordered Array
Insert
Search
O(1)
O(n)
194
Input
Dictionary/Map ADT
key, value Array
2,v3
4,v4
7,v1
9,v2
0
1
2
Problem: Store value/data
associated with keys.
6,v5
3
4
5
6
7
…
Implementations:
Unordered Array
Ordered Array
Insert
O(1)
O(n)
Search
O(n)
O(logn)
195
6,v5
entries
Implementations:
Problem: Store value/data
associated with keys.
trailer
nodes/positions
2,v3
4,v4
7,v1
9,v2
Dictionary/Map ADT
header
Input
key, value
Insert
Search
Unordered Array
O(1)
O(n)
Ordered Array
O(n)
O(logn)
Ordered Linked List
O(n)
O(n)
Inserting is O(1) if you have the spot.
but O(n) to find the spot.
196
Input
key, value
2,v3
4,v4
7,v1
9,v2
Dictionary/Map ADT
Problem: Store value/data
associated with keys.
38
25
17
51
31
42
63
4 21 28 35 40 49 55 71
Implementations:
Unordered Array
Ordered Array
Ordered Linked List
Binary Search Tree
Insert
O(1)
O(n)
O(n)
O(logn)
Search
O(n)
O(logn)
O(n)
O(logn)
197
Input
key, value
5,v1
9,v2
2,v3
7,v4
Dictionary/Map ADT
Problem: Store value/data
associated with keys.
Hash Tables are very fast,
but keys have no order.
Implementations:
Insert
Unordered Array
O(1)
Ordered Array
O(n)
Ordered Linked List
O(n)
Binary Search Tree
O(logn)
Hash Tables
Avg: O(1)
Search
O(n)
O(logn)
O(n)
O(logn)
O(1)
Next
O(n)
O(1)
O(1)
O(1)
O(n)
(Avg)
198
Input
key, value
Hash Tables
Consider an array
# items stored.
Universe
of Keys
Universe of keys
is likely huge.
(eg social insurance
numbers)
0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
5
6
7
8
The Mapping
from key
to Array Cell
is many to one
Called
Hash Function
Hash(key) = i
9
…
199
Input
key, value
5,v1
9,v2
2,v3
7,v4
5,?
4,v5
Collisions
are a problem.
Hash Tables
Universe
of Keys
0
1
2
3
4
5
6
7
8
9
…
Implementations:
Hash Function
Consider an array
# items stored.
0
1
2
3
4
5
6
7
8
The Mapping
from key
to Array Cell
is many to one
Called
Hash Function
Hash(key) = i
9
Insert
O(1)
Search
O(1)
200
Understand Quantifiers!!!
Problem P is computable if
A, "I, A(I)=P(I) & Time(A,I) ≤ T
I have a algorithm A that I claim works.
Oh yeah, I have a worst case
input I for which it does not.
Actually my algorithm always gives the right answer.
Ok, but I found in set of keys
I = key1,…, keyn
for which lots of collisions happen
and hence the time is bad.
201
Understand Quantifiers!!!
Problem P is computable by a random algorithm if
A, "I, " R, AR(I)=P(I)
Remember
ExpectedR Time(AR,I) ≤ T
Quick Sort
I have a random algorithm A that I claim works.
I know the algorithm A, but not its random coin flips R.
I do my best to give you a worst case input I.
The random coin flips R are There are worst case coin flips
independent of the input.
but not worst case inputs.
Actually my algorithm always gives the right answer.
And for EVERY input I,
the expected running time (over choice of R)
is great.
202
Input
key, value
287 005,v1
923 005,v2
394 005,v3
482 005,v4
287 005,?
193 005,v5
Random Hash Functions
Fix the worst case input I
Universe
of Keys
0
1
287 005
2
3
482 005
4
Choose a random
mapping
Hash(key) = i
We don’t expect there
to be a lot of collisions.
5
193 005
6
7
394 005
923 005
8
9
(Actually, the random
Hash function likely is
chosen and fixed before the
input comes, but the key is
that the worst case input
does not “know” the hash
function.)
203
Input
key, value
287 005,v1
923 005,v2
394 005,v3
482 005,v4
287 005,?
193 005,v5
Random Hash Functions
Throw m/2 balls (keys)
randomly
into m bins (array cells)
Universe
of Keys
0
1
287 005
2
3
482 005
4
5
193 005
6
7
8
394 005
9 spread out reasonably well.
923 The
005 balls get
- Exp( # a balls a ball shares a bin with ) = O(1)
- O(1) bins contain O(logn) balls.
204
Random Hash Functions
Choose a random mapping
Hash(key) = i
Universe
of Keys
0
1
2
3
4
5
6
7
8
9
We want Hash to be
computed in O(1) time.
0
1
Theory people use
2
3
Hash(key) = (akey mod p) mod N
4
N = size of array
p is a prime > |U|
a is randomly chosen [1..p-1]
n is the number of data items.
5
6
7
8
9
…
a adds just
enough
randomness.
The integers mod p The mod N ensures
form a finite field the result indexes a
similar to the reals. cell in the array.205
Random Hash Functions
Choose a random mapping
Hash(key) = i
Universe
of Keys
0
1
2
3
4
5
6
7
8
9
0
1
2
We want Hash to be
computed in O(1) time.
Theory people use
3
Hash(key) = (akey mod p) mod N
4
N = size of array
p is a prime > |U|
a is randomly chosen [1..p-1]
n is the number of data items.
5
6
7
8
9
Pairwise Independence
"k1 & k2 Pra( Hasha(k1)=Hasha(k2) ) = 1/N
…
Proof: Fix distinct k1&k2 U. Because p > |U|, k2-k1 mod p0. Because p is prime, every
nonzero element has an inverse, eg 23mod5=1. Let e=(k2-k1)-1. Let D = a (k2-k1) mod p, a
= De mod p, and d = D mod N. k1&k2 collide iff d=0 iff D = jN for j[0..p/N]
iff a = jNe mod p. The probability a has one of these p/N values is 1/p p/N = 1/N. 206
Random Hash Functions
Choose a random mapping
Hash(key) = i
Universe
of Keys
0
1
2
3
4
5
6
7
8
9
0
1
2
We want Hash to be
computed in O(1) time.
Theory people use
3
Hash(key) = (akey mod p) mod N
4
N = size of array
p is a prime > |U|
a is randomly chosen [1..p-1]
n is the number of data items.
5
6
7
8
9
Pairwise Independence
"k1 & k2 Pra( Hasha(k1)=Hasha(k2) ) = 1/N
…
Insert key k. Exp( #other keys in its cell )
= Exp( k1,k collision ) = k ,k Exp(collision)
1
= n 1/N = O(1).
207
Random Hash Functions
Choose a random mapping
Hash(key) = i
Universe
of Keys
0
1
2
3
4
5
6
7
8
9
0
1
2
We want Hash to be
computed in O(1) time.
Theory people use
3
Hash(key) = (akey mod p) mod N
4
N = size of array
p is a prime > |U|
a is randomly chosen [1..p-1]
n is the number of data items.
5
6
7
8
9
Pairwise Independence
"k1 & k2 Pra( Hasha(k1)=Hasha(k2) ) = 1/N
…
Not much more independence. Knowing that Hasha(k1)=Hasha(k2)
decreases the range of a from p to p/N values. Doing this logp/logN
times, likely determines a, and hence all further collisions.
208
Random Hash Functions
Choose a random mapping
Hash(key) = i
Universe
of Keys
0
1
2
3
4
5
6
7
8
9
0
1
2
We want Hash to be
computed in O(1) time.
Theory people use
3
Hash(key) = (akey mod p) mod N
4
N = size of array
p is a prime > |U|
a is randomly chosen [1..p-1]
n is the number of data items.
5
6
7
8
9
…
This is usually written akey+b.
The b adds randomness to which cells get hit,
but does not help with collisions.
209
Handling Collisions
Input
key, value
Handling Collisions
394,v1 Universe
When different data
482,v2 of Keys
items are mapped to
583,v3
0
1
2
3
4
5
6
7
8
9
the same cell
0
1
2
3
4
5 394,v1
583, v3
6
7 482,v2
8
9
…
10
210
Separate Chaining
Input
key, value
Separate Chaining
394,v1 Universe
Each cell uses external
482,v2 of Keys
memory to store all the data
583,v3
0
items hitting that cell.
0
1
2
3
4
5
6
7
8
9
1
2
3
4
5 394,v1
583, v3
394,v1
583,v3
6
7 482,v2
482,v2
8
9
…
10
Simple
but requires
additional memory 211
A Sequence of Probes
Input
key, value
Open addressing
394,v1 Universe
The colliding item is placed
482,v2 of Keys
in a different cell of the table
583,v3
0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
5 394,v1
583, v3
6
7 482,v2
8
9
…
10
212
A Sequence of Probes
Input
key, value
Cells chosen by a
103,v6 Universe
sequence of probes.
of Keys
put(key k, value v)
0
0 583, v3
1
2
3
4
5
6
7
8
9
1
i1 = (ak mod p) mod N
5
2
3 290,v4
4
5 394,v1
6
7 482,v2
Theory people use
i1 = Hash(key) = (akey mod p) mod N
N = size of array
11
1009
p is a prime > |U|
a[1,p-1] is randomly chosen 832
8 903,v5
9
…
10
akey = 832103 = 85696
85696 mod 1009 = 940
940 mod 11 = 5 = i1
213
A Sequence of Probes
Input
key, value
Cells chosen by a
103,v66 Universe
103,v
sequence of probes.
of Keys
put(key k, value v)
0
0 583, v3
1
2
3
4
5
6
7
8
9
i1 = (ak mod p) mod N
1
5
2
3 290,v4
4
5 394,v1
6
7 482,v2
8 903,v5
1
This was our first in the
sequence of probes.
9
…
10
214
A Sequence of Probes
Input
key, value
Double Hash
103,v6 Universe
to get sequence distance d.
of Keys
put(key k, value v)
0
0 583, v3
1
2
3
4
5
6
7
8
9
i1 = (ak mod p) mod N
d = (bk mod q) + 1
1
2
5
3
3 290,v4
4
5 394,v1
1
6
7 482,v2
8 903,v5
9
…
10
215
A Sequence of Probes
Input
key, value
Double Hash
103,v6 Universe
to get sequence distance d.
of Keys
put(key k, value v)
0
3
0 583, v3
1
2
3
4
5
6
7
8
9
5
i1 = (ak mod p) mod N
3
d = (bk mod q) + 1
for j = 1..N
i = i1 + (j-1)d mod N
1
2
3 290,v4
4
4
5 394,v1
6
7 482,v2
8 903,v5
1
5 d=3
2
9
If N is prime,
this sequence will reach
each cell.
…
d=3
10
3
216
A Sequence of Probes
Input
Stop this sequence of
key, value
probes when:
103,v66 Universe
103,v
Cell is empty
of Keys
or key already there
0
583, v 3
1
2
3
4
5
6
7
8
9
0
1
3
2
3 290,v4
4
5 394,v1
6
7 482,v2
8 903,v5
9
…
10
value put(key k, value v)
5
i1 = (ak mod p) mod N
4
3
d = (bk mod q) + 1
for j = 1..N
1
i = i1 + (j-1)d mod N
5
if ( cell(i)==empty )
cell(i) = k,v
2
return was not there
if ( cellkey(i)==k )
vold = cellvalue(i)
3
cell(i) = k,v
217
return v
A Sequence of Probes
Input
key, value
103,v6 Universe
115,v7 of Keys
103,?
477,?
Del 583
0
1
2
3
4
5
6
7
8
9
v3
deleted
0 583,
1
value del(key k)
2
3 290,v4
4
5 394,v1
6 103,v6
7 482,v2
8 903,v5
9 115,v7
…
10
218
Running Time
Input
key, value
Universe
of Keys
0
1
2
3
4
5
6
7
8
9
The load factor
a = n/N < 0.9
# data items / # of array cells.
0
1
2
3
4
5 394,v1
6 193,v3
N = 11
n=6
a = 6/11
7 472,v4
8 938,v2
9 873,v5
…
10 093,v6
For EVERY input:
Expected number of probes is
= O(1/(1-a)) = O(1)
219
Running Time
Input
key, value
Universe
of Keys
0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
5 394,v1
6 193,v3
7 472,v4
8 938,v2
When the load factor gets
bigger than some threshold,
rehash all items into an array
that is double the size.
Total cost of doubling
= 1 + 2 + 4 + 8 + 16 + … + n
= 2n-1
amortized time
= TotalTime(n)/n
= (2n-1)/n = O(1).
9 873,v5
…
10 093,v6
220
Searching in a Graph
Generic Search
Breadth First Search
Dijkstra's Shortest Paths Algorithm
Depth First Search
Linear Order
Lecture 5
Jeff Edmonds
York University
COSC 3101
221
Graphs
• A graph is a pair (V, E), where
– V is a set of nodes, called vertices
– E is a collection of pairs of vertices, called edges
– Vertices and edges are positions and store elements
• Example:
– A vertex represents an airport and stores the three-letter airport code
– An edge represents a flight route between two airports and stores the
mileage of the route
PVD
ORD
SFO
LGA
HNL
Last Update: Dec 4, 2014
LAX
DFW
Andy Mirzaian
MIA
222
Edge Types
• Directed edge
–
–
–
–
ordered pair of vertices (u,v)
first vertex u is the origin
second vertex v is the destination
e.g., a flight
ORD
flight
AA 1206
PVD
ORD
849
miles
PVD
• Undirected edge
– unordered pair of vertices (u,v)
– e.g., a flight route
• Directed graph
– all the edges are directed
– e.g., route network
• Undirected graph
– all the edges are undirected
– e.g., flight network
Last Update: Dec 4, 2014
Andy Mirzaian
223
Applications
• Electronic circuits
– Printed circuit board
– Integrated circuit
• Transportation networks
– Highway network
– Flight network
• Computer networks
– Local area network
– Internet
– Web
• Databases
– Entity-relationship diagram
Last Update: Dec 4, 2014
Andy Mirzaian
224
Terminology
• End vertices (or endpoints) of an edge
– U and V are the endpoints of a
• Edges incident on a vertex
a
– a, d, and b are incident on V
• Adjacent vertices
U
– U and V are adjacent
• Degree of a vertex
V
b
d
X
c
– X has degree 5
e
W
• Parallel edges
– h and i are parallel edges
• Self-loop
h
j
Z
i
g
f
Y
– j is a self-loop
Last Update: Dec 4, 2014
Andy Mirzaian
225
Terminology (cont.)
• Path
–
–
–
–
V
sequence of alternating vertices and edges
a
begins with a vertex
ends with a vertex
d
U
each edge is preceded and followed
P2
by its endpoints
c
• Simple path
– path such that all its vertices and edges
are distinct
– P1 = (V,b,X,h,Z) is a simple path
– P2 = (U,c,W,e,X,g,Y,f,W,d,V) is a path that is not simple
Andy Mirzaian
P1
X
e
W
• Examples:
Last Update: Dec 4, 2014
b
Z
h
g
f
Y
226
Terminology (cont.)
• Cycle
– circular sequence of alternating vertices and edges
– each edge is preceded and followed by its endpoints
• Simple cycle
– cycle such that all its vertices and
edges are distinct
• Examples:
U
– C1 = (V,b,X,g,Y,f,W,c,U,a,)
is a simple cycle
– C2 = (U,c,W,e,X,g,Y,f,W,d,V,a,)
is a cycle that is not simple
Last Update: Dec 4, 2014
a
Andy Mirzaian
c
V
b
d
C2
X
e
C1
g
W
f
h
Z
Y
227
Properties
Notation
Property 1
v
deg(v) = 2m
Proof: each edge is counted twice
n
m
deg(v)
number of vertices
number of edges
degree of vertex v
Property 2
In an undirected graph with no self-loops and
no multiple edges
m n (n - 1)/2
Proof: each vertex has degree at most (n - 1)
What is the bound for a directed graph?
Last Update: Dec 4, 2014
Andy Mirzaian
228
Vertices and Edges
• A graph is a collection of vertices and edges.
• We model the abstraction as a combination of three data
types: Vertex, Edge, and Graph.
• A Vertex is a lightweight object that stores an arbitrary
element provided by the user (e.g., an airport code)
– We assume it supports a method, element(), to retrieve the stored
element.
• An Edge stores an associated object (e.g., a flight number,
travel distance, cost), retrieved with the element( )
method.
Last Update: Dec 4, 2014
Andy Mirzaian
229
Graph ADT: part 1
Last Update: Dec 4, 2014
Andy Mirzaian
230
Graph ADT: part 2
Last Update: Dec 4, 2014
Andy Mirzaian
231
Edge List Structure
• Vertex object
– element
– reference to position in vertex sequence
• Edge object
–
–
–
–
element
origin vertex object
destination vertex object
reference to position in edge sequence
• Vertex sequence
– sequence of vertex objects
• Edge sequence
– sequence of edge objects
Last Update: Dec 4, 2014
Andy Mirzaian
232
Adjacency List Structure
• Incidence sequence for each vertex
– sequence of references to edge objects
of incident edges
• Augmented edge objects
– references to associated positions in
incidence sequences of end vertices
Last Update: Dec 4, 2014
Andy Mirzaian
233
Adjacency Map Structure
• Incidence sequence for each vertex
– sequence of references to adjacent
vertices, each mapped to edge object of
the incident edge
• Augmented edge objects
– references to associated positions in
incidence sequences of end vertices
Last Update: Dec 4, 2014
Andy Mirzaian
234
Adjacency Matrix Structure
• Edge list structure
• Augmented vertex objects
– Integer key (index) associated with vertex
• 2D-array adjacency array
– Reference to edge object for adjacent vertices
– Null for non-adjacent vertices
• The “old fashioned”
version just has
0 for no edge and
1 for edge
Last Update: Dec 4, 2014
Andy Mirzaian
235
Performance
n vertices, m edges
no parallel edges
no self-loops
Edge
List
Adjacency
List
Adjacency
Matrix
Space
n+m
n+m
n2
incidentEdges(v)
areAdjacent (v, w)
m
m
deg(v)
min(deg(v), deg(w))
n
1
insertVertex(o)
1
1
n2
insertEdge(v, w, o)
1
1
1
removeVertex(v)
m
n2
removeEdge(e)
1
deg(v)
max(deg(v), deg(w))
Last Update: Dec 4, 2014
Andy Mirzaian
1
236
Subgraphs
• A subgraph S of a graph G is a graph such that
– The vertices of S are a subset of the vertices of G
– The edges of S are a subset of the edges of G
• A spanning subgraph of G is a subgraph that
contains all the vertices of G
Subgraph
Last Update: Dec 4, 2014
Spanning subgraph
Andy Mirzaian
237
Connectivity
• A graph is connected if there is a path between every
pair of vertices
• A connected component of a graph G is a maximal
connected subgraph of G
Connected graph
Last Update: Dec 4, 2014
Non connected graph with two
connected components
Andy Mirzaian
238
Trees and Forests
• A (free) tree is an undirected graph T such that
– T is connected
– T has no cycles
This definition of tree is different from the one of a rooted tree
• A forest is an undirected graph without cycles
• The connected components of a forest are trees
Tree
Last Update: Dec 4, 2014
Forest
Andy Mirzaian
239
Spanning Trees and Forests
• A spanning tree of a connected graph is a spanning
subgraph that is a tree
• A spanning tree is not unique unless the graph is a tree
• Spanning trees have applications to the design of
communication networks
• A spanning forest of a graph is a spanning subgraph
that is a forest
Spanning tree
Graph
Last Update: Dec 4, 2014
Andy Mirzaian
240
Graph Search
s
b
a
d
c
g
f
j
i
h
k
e
m
l
We know found nodes are
reachable from s because we
have traced out a path.
If a node has been handled,
then all of its neighbors
have been found.
241
Graph Search
Which foundNotHandled node do we handle?
•Queue: Handle in order found.
•Breadth-First Search
•Stack: Handle most recently found
•Depth-First Search
•Priority Queue:
Handle node that seems to be closest to s.
•Shortest (Weighted) Paths:
242
Dijkstra's
Handled Nodes
s
u
Found Nodes
v
Handled paths go through handled edges
through any number of handled nodes
followed by last edge to an unhandled node.
For handled w,
d(w) is the length of the
shortest paths to w.
d(v) is the length
of the shortest handled
path to v.
Handle node with smallest d(u).
243
Dijkstra's
0
16
17
13
19
20
Π(e) =c
37
∞
Π(d) =c
Handle c
244
Found
Not Handled
Stack
<node,# edges>
DFS
s
b
a
e
d
g
c
f
j
i
h
i,0
c,2
a,1
s,1
m
k
l
245
Algorithmic Paradigms
Brute Force: Optimazation Problem
Greedy Algorithm: Minimal Spanning Tree
Dual Hill Climbing: Max Flow / Min Cut
Linear Programing: Hotdogs
Recursive Back Tracking: Bellman-Ford
Dynamic Programing: Bellman-Ford
NP-Complete Problems
Lecture 9
Jeff Edmonds
York University
COSC 2011
246
Optimization Problems
•Ingredients:
•Instances: The possible inputs to the problem.
•Solutions for Instance: Each instance has an
exponentially large set of solutions.
•Cost of Solution: Each solution has an easy to
compute cost or value.
•Specification
•<preCond>: The input is one instance.
•<postCond>: A valid solution with optimal
cost. (minimum or maximum)
247
Greedy Algorithms
Problem: Choose the best m prizes.
Iterative Greedy Algorithm:
Loop: grabbing the best, then second best, ...
if it conflicts with committed objects
or fulfills no new requirements.
Reject this next best object
else
Commit to it.
248
Greedy Algorithms
Loop Invariant
We have not gone wrong.
There is at least one optimal solution St
that extends the choices At made so far.
Take the lion because it looks best.
Consequences: If you take the lion,
you can't take the elephant.
Maybe some optimal solutions do not contain the lion.
But at least one does.
249
Minimal Spanning Tree
Instance: A undirected graph
with weights on the edges.
s
1
a
b
30
30
40
3
1
2
2
4
15
k 11
2
2
1
d
c
f
i
2
g
6
h
j
250
Minimal Spanning Tree
s
30
30
40
3
1
2
2
2
Cost: Sum of edge weights
Goal: Find Minimal Spanning Tree
4
15
k 11
2
Connected nodes still connected.
1
d
c
f
i
2
1
a
Instance: A undirected graph
with weights on the edges.
Solution: A subset of edge
b
•A tree (no cycles, not rooted)
•Spanning
g
6
h
j
251
Minimal Spanning Tree
s
a
Instance: A undirected graph
with weights on the edges.
Solution: A subset of edge
b
•A tree (no cycles)
•Spanning
2
1
30
30
40
3
Connected nodes still connected.
Cost: Sum of edge weights
2
d
Goal: Find Minimal Spanning Tree
c
2
Greedy Alg: Commit to the edge
4
15
that looks the “best.”
f
k 11 g 6 h Must prove that this is
2
•acylic
i
j Done
•spanning
2
Can’t add because of cycle. •optimal.
252
1
1
Adaptive Greedy
Fixed Priority:
Sort the objects from best to worst
and loop through them.
Adaptive Priority:
–Greedy criteria depends on which objects have
been committed to so far.
–At each step, the next “best” object is chosen
according to the current greedy criteria.
–Searching or re-sorting takes too much time.
–Use a priority queue.
253
•Max Flow
Network Flow
•Min Cut
U = Canada
V = USA
Goal:
Max Flow
254
Primal-Dual Hill Climbing
measure
progress
Exit
We have a valid solution.
(not necessarily optimal)
Value of our solution.
Take a step that goes up.
Make small local changes to your solution to
construct a slightly better solution.
Initially have the “zero
Global Max
Can't take a step that goes up.
Local Max
Problems:
Running time?
Can our Network Flow
If you take small step,
Algorithm get stuck
could be exponential time.
in a local maximum? 255
Primal-Dual Hill Climbing
Prove:
•For every location to stand either:
•the alg takes a step up or
•the alg gives a reason that explains why not
by giving a ceiling of equal height.
i.e. " L [ L’ height(L’) > height(L) or
R height(R) = height(L)]
No Gap
Flowalg witness that network has this flow.
Cutalg witness that network has no bigger flow. 256
Linear Programing
Given today’s prices,
what is a fast algorithm
to find the cheapest hotdog?
257
Linear Programing
(Abstract Out Essentials)
Amount to add: x1, x2, x3, x4
Cost: 29, 8, 1, 2
Cost of Hotdog:
Constraints:
•moisture
•protein,
•…
29x1 + 8x2 + 1x3 + 2x4
3x1 + 4x2 – 7x3 + 8x4 ≤ 12
2x1 - 8x2 + 4x3 - 3x4 ≤ 24
-8x1 + 2x2 – 3x3 - 9x4 ≤ 8
x1 + 2x2 + 9x3 - 3x4 ≤ 31
258
•
•
•
Recursive Back Tracking
Bellman Ford
Consider your instance I.
Ask a little question (to the little bird) about its optimal solution.
Try all answers k.
• Knowing k about the solution
restricts your instance to a subinstance subI.
• Ask your recursive friend for a optimal solution subsol for it.
• Construct a solution optS<I,k> = subsol + k
for your instance that is the best of those consistent with the
kth bird' s answer.
• Return the best of these best solutions.
259
Recursive Back Tracking
Bellman Ford
Specification: All Nodes Shortest-Weighted Paths with ≤l edges
•<preCond>: The input is a graph G (directed or undirected)
with edge weights (possibly negative) and integer l.
•<postCond>: For each u,v, find a shortest path from u to v
with at most l edge.
Stored in a matrix Dist[u,v].
For a recursive algorithm,
we must give our friend
a smaller subinstance.
How can this instance be
made smaller?
Remove a node? and edge?
b 10
1
u
25
c
30
40
g
d
k
15
1
181
2
3
3
2
2
h
6
l=3
1
2
i
v
8
l=4
260
•
•
•
Recursive Back Tracking
Bellman Ford
Consider your instance I = u,v,l.
Ask a little question (to the little bird) about its optimal solution.
• “What node is in the middle of the path?”
• She answers node k.
• I ask one friend subI = u,k, l/2
and another
subI = k,v, l/2
• optS<I,k> = subsolu,k,l/2
+k+
b 10
subsolk,v,l/2
1
c
u
is the best solution for I
30
consistent with the kth bird‘s
2
25
40
3
answer.
3
1
2
Try all k and return the best
k
v
d
of these best solutions.
2
8
1
15
2
g
i
l=4
181 h
6
261
Recursive Back Tracking
Dynamic Programming Algorithm
•Given an instance I,
•Imagine running the recursive alg on it.
• Determine the complete set of subI
ever given to you, your friends, their friends, …
• Build a table indexed by these subI
•Fill in the table in order so that nobody waits.
b 10
1
Given graph G, find Dist[uv,l] for l = u
1,2,4,8,… ,n
30
25
40
c
3
2
g
d
k
15
1
181
2
3
2
h
6
1
2
i
v
8
l=4
262
Dynamic Programming Algorithm
Loop Invariant: For each u,v,
Dist[u,v,l] = a shortest path from u to v with ≤l edges
Exit
for l = 2,4,8,16,…,2n
% Find Dist[uv,l] from Dist[u,v,l/2]
for all u,v Verticies
Dist[u,v,l] = Dist[u,v,l/2]
for all k Verticies
Dist[u,v,l] = min( Dist[u,v,l], Dist[u,k,l/2]+Dist[k,v,l/2] )
b 10
1
c
u
25
30
40
3
2
g
d
k
15
1
181
2
3
2
h
6
1
2
i
v
8
l=4
263
NP-Complete Problems
Computable
Halting
Exp
NP Non-Deterministic
Polynomial Time
Jack Edmonds
Steve Cook
SAT
•exponential time to search
•poly time to verify given witness
Poly
Known
Circuit-Sat Problem:
Does a circuit have a satisfying assignment.
Matching
GCD
NP-Complete Problems
Industry would love a free lunch
X
•Given a description of a good plane, automatically
find one.
•Given a circuit, find a satisfying assignment
•Given a graph find a bichromatic coloring.
•Given course description, find a schedule
X
X X
X
NP-Complete Problems
Find the biggest clique,
ie subset of nodes that are all
connected.
NP-Complete Problems
Find the LONGEST simple s-t path.
NP-Complete Problems
Find a partition of the nodes into two
sets with most edges between them.
NP-Complete Problems
Colour each node
Use the fewest # of colours.
Nodes with lines between them must
have different colours.
NP-Complete Problems
Try all possible
colourings
Too many to try.
A 50 node graph has more
colourings than the number of atoms
NP-Complete Problems
Is there a fast algorithm?
Most people think not.
We have not been able to prove
that there is not.
It is one of the biggest open
problems in the field.
End
272