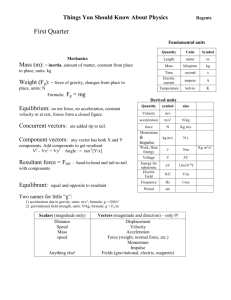
Review for Comprehensive Final
advertisement

REVIEW Final Exam 1 Final Exam Information DATE: Monday, Dec 14 TIME: 10:00 AM - 12:00 noon ROOM ASSIGNMENT: Butler-Carlton Hall Room 125 2 Final Exam Information • Comprehensive exam covers all topics on syllabus. • Equivalent to taking two regular exams. • Format is similar to what you have seen on hourly exams throughout the semester. 3 Strategy for Studying • Review topics: – From the first half of the semester. – Topics that you are least comfortable with • WORK homework problems and review problems and examples from the text. 4 Test taking strategy • Get to bed by midnight the night before. • Eat a good breakfast. • Work the problems you CAN and go back to the rest later. • If you have time, take a two minute mental break and check over the whole exam once before turning in. 5 Sign Convention Rules • Always use a right handed coordinate system • Designate the equation you are writing and indicate positive direction. • Use right hand rule when evaluating moments. 6 Vectors Types of vectors: • Position vectors ( r ) • Unit vectors ( u ) • Vectors expressing a force ( F ) / moment ( M ) Vector operations: • Addition / subtraction • Dot product – i*i + j*j + k*k – Scalar answer (NO < i, j, k > components; just magnitude) 7 Particle Equilibrium - 2D & 3D Static Equilibrium Equations: FX FY (for 2D) FZ (for 3D) Solving these problems: • Draw Free Body Diagram of point! • Springs add additional equation FSP = ks F = 0 (for equilibrium problems) OR F = FR (for resultant force) 8 Moment Created by Forces Static Equilibrium Equation: MPOINT Solving these problems: • Draw A PICTURE of the system! • Scalar notation (M = F*d): – Make sure moment arm is to force – Watch sign convention and direction of moment created by each component of each force. 9 3D Moment vectors 10 Moment Created by Forces Solving these problems (…continued) : • Vector notation ( M = r x F ): – Watch direction of position vector ( r ) – r is always first in cross product. • Moment about a line: – Find moment about point ON line – Then M = M uline 11 Couple moments Can sum moments for two forces creating a couple at any point and the resulting moment will be the same value. 12 Equivalent Systems • Locate point of interest. If you have to find it, then use the problem to help you find a preliminary “stand in” point. • Sum forces (F = FR) • Sum moments at point of interest (M = MR) • If problem asks for resultant force ONLY, then find location (d) using equation MR = FR*d 13 Distributed Loads • Reduce to a single force by integrating the area under the load diagram. • Find location of resultant force using the same method as for equivalent systems 14 Equilibrium of a 2D Rigid Body Equilibrium Equations for 2D: FX FY Mpoint Solving these problems: • • • • Identify all forces and support reactions Draw Free Body Diagram of object! Sum forces in x and y direction. Sum moments at a point 15 Trusses: 2D Rigid Bodies • Consist entirely of 2-force members. • Direction of forces in members act along the direction of member (axially) • Note axial direction of forces using (T) for tension and (C) for compression. • Analyze forces by cutting through internal members 16 Analyzing Trusses • When cutting through members, this results in Free Body Diagrams of: – Single joint / pin connection • Max of 2 unknowns FX FY – Section of structure (two or more joints) • Max of 3 unknowns FX FY Mpoint • Always assume unknown forces to be in tension (positive) negative answer indicates compression 17 Frames and Machines • DO NOT consist entirely of 2-force members. – Know how to identify 2-force members to help eliminate unknowns – DO NOT cut through members, but take the structure apart at the connections. • Direction of forces acting at connections is unknown, so make an assumption. • Make sure forces on contacting members act in opposite directions. 18 Analyzing Frames & Machines • Can establish equilibrium for each Free Body Diagram. • Look for the most efficient path. Try to begin with a FBD you can solve… or get as close as you can… • You may have more than 3 unknowns on a particular diagram, so just solve what you can and move on … • …Using the process of elimination to solve unknowns. • The TOTAL number of unknowns cannot exceed the TOTAL number of equilibrium equations you can write. 19 Internal Structural Loads • Multi-force members carry – Moment load: bending (M) or torsional (T) – Shear force (V) – Normal force (N) • To evaluate, cut through members • “Expose” internal loads at the cut… 20 Types of Problems: Evaluating Internal Loads 1. Cut through structure at specific point. 2. Divide structure into regions bounded by discontinuities. Cut through structure within a region at a random point ‘x’. 3. Integrate load on beam (2x) and solve for constants of integration. 4. Construct diagrams using “area method.” 21 (does not give equations, just a graph) Arbitrary Cut • Whenever there is a change in load, a discontinuity is created. • Divide beam into regions determined by discontinuity in loading. • The beam shown below has three distinct regions bounded by (0 ≤ x < 3) (3 ≤ x < 5) (5 ≤ x < 8) • Set origin (x = 0) at left end of beam. • Cannot evaluate internal shear EXACTLY at the point of an applied force. Must be just to the right or left of load. Cut through structure at arbitrary point. 22 Drawing V & M Diagrams • Plot directly under beam • x = 0 at left end • Plot shear first • Then plot moment • Shear and moment are measured on y-axis • Label each axis and graph including units • Label all minimums and maximums, including points where shear crosses x-axis. • SHOW calculations used to get values and draw graphs. 23 Six Rules for V & M Diagrams 1. Concentrated force creates a jump in the shear diagram Creates downward jump Creates upward jump 2. Change in shear equals area under load diagram 3. Slope of shear diagram equals value of distributed load 4. Change in moment equals area under shear diagram 5. Slope of moment diagram equals value of shear diagram. 6. Concentrated moment creates a jump in moment diagram Creates downward jump Creates upward jump 24 Dry Friction (Fs = s N) • We always evaluate the case for impending motion • # of unknowns = # of equil. eqns. + friction eqn. • Dimensions must be given to check for tipping. Mo to check for tipping •If (x < l / 2) then block will slide. •If (x > l / 2) then block will tip. x = Ph W • Position of applied force influences how object responds 25 Friction Wedges impending motion • Uses the same friction equation as for dry friction – there are just more pieces. • Be very careful when evaluating that you look at the direction of impending motion for each piece. • Free Body Diagrams are absolutely essential. impending motion remains stationary 26 Belt Friction T2 = T1e • T2 is in the direction of impending motion • T1 opposes direction of impending motion • = coefficient of friction between belt and surface of contact • = angle of contact between belt and surface 27 Finding Centroids Calculate as a weighted average: 1. Calculate the first “moment” of each differential element [weight, mass, volume, area, length] about an axis 2. Divide by total [weight, mass, volume, area, length] 28 Using Single Integration 1) 2) 3) 4) 5) 6) 7) DRAW an ‘element’ on the graph. ~ ~ Label the centroid (x, y) Label the point where the element intersects the curve (x, y) Write down the general equation Define each term according the problem statement Determine limits of integration Integrate 29 Finding Centroids of Composite Shapes 1) 2) 3) 4) 5) Divide the object into simple shapes. Establish a coordinate axis system on the sketch ~ ~ Label the centroid (x, y) of each simple shape Set up a table as shown below to calculate values Subtract empty areas instead of adding them. 30 First Theorem of Pappus & Guldinus • The distance the centroid travels for a surface area of revolution will be in the shape of a circle. • Arc length for a circle is defined as S = r y x As = LD _ As = r L or for composite shapes: _ TORUS: http://upload.wikimedia.org/wikipedia/commons/c/c6/Simple_Torus.svg By GYassineMrabetTalk; This vector image was created with Inkscape. (Own work) As = (ri Li) Second Theorem of Pappus & Guldinus y x The volume of a body of revolution (a solid) equals the generating area times the distance traveled by the centroid of the area while the body is being generated. V = AD TORUS: http://upload.wikimedia.org/wikipedia/commons/c/c6/Simple_Torus.svg By GYassineMrabetTalk; This vector image was created with Inkscape. (Own work) Resultant Force for Fluid on Surface Flat surfaces Solve for perpendicular resultant force _ FR = z A or FR = (w1+w2)(1/2)(L) Curved surfaces Solve for vertical and horizontal components of resultant force and THEN find resultant. FV = (volume) FH = FR 33