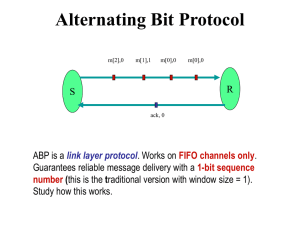
Ch 15. Agreement
advertisement

Chap 15. Agreement
Problem
Processes need to agree on a single bit
No link failures
A process can fail by crashing (no malicious
behavior)
Messages take finite (though unbounded)
time
Looks easy, can this be solved ?
Consensus in Asynchronous systems
Impossible even if just one process can fail !
(Fischer, Lynch, Peterson – FLP result)
N (N ¸ 2) processes
Each process starts with an initial value {0,1}
that is modeled as the input register x
Making a decision is modeled by writing to
the output register y
Output registers are write once
Assumptions
Initial independence
Processes can choose their input independently
Commute property :
If events e and f are
on different processes
they commute
Assumptions (contd.)
Asynchrony of events:
Any receive event can be arbitrarily delayed
Every message is eventually delivered
If e is a receive event
and e is enabled at G then
se is also enabled at G
Requirements
Agreement
Non-triviality
Two non-faulty processes cannot commit on
different values
Both 0 and 1 should be possible outcomes
Termination
A non-faulty process terminates in finite time
Informal proof of the impossibility result
We show that no protocol can satisfy
agreement, non-triviality and termination in
the presence of even 1 failure
We show that :
There is an initial global state in which the system
is non-decisive
There exists a way to keep the system nondecisive
Indecision
Lat G.V be the set of decision values reachable from
a global state G
Since a non-faulty process terminates, G.V is nonempty
G is :
Bivalent: G.V = { 0 ,1 } – indecisive
0-Valent: G.V = { 0 } – always leads to deciding 0
1-Valent: G.V = { 1 } – always leads to deciding 1
We show that there exists a bivalent initial state
Claim: Every consensus protocol has a
bivalent initial state
Assume claim is false
Non-triviality : The initial set of global states must
contain 0-valent and 1-valent states
Adjacent global states: If they differ in the state of
exactly one process
There must be adjacent 0-valent and 1-valent states
which differ in the state of, say, p
Apply a sequence where p does not take any steps
Contradiction
Claim: There exists a method to keep the
system indecisive
Event e (on process p) is applicable to G
G is the set of global states reachable from
G without applying e
H = e(G )
Claim : H contains a bivalent global state
Assume that H contains no bivalent states
Claim 1: H contains both 0-valent and 1valent states
Neighbors : 2 global states are neighbors if
one results from the other in a single step
Claim 2: There exist neighbors G0, G1 such
that
H0 = e(G0) is 0-valent and
H1 = e(G1) is 1-valent
Claim 2:There exist neighbors G0, G1 :
H0 = e(G0) is 0-valent and
H1 = e(G1) is 1-valent
Let the the smallest sequence of events
applied to G without applying e such that
et(G) has a different valency from e(G)
Such a sequence exists
The last two global states in the sequence give us
the required neighbors
w.l.o.g. let G1 = f(G0) where f is an event on
process q.
Case 1 : p is different from q
F is applicable to H0 resulting in H1
But H0 is 0-valent and H1 is 1-valent
Case 2:
p=q
Commute property
Application: Terminating Reliable
Broadcast (TRB)
There are N processes in the system and P0 wants
to broadcast a message to all processes.
Termination: Every correct process eventually delivers
some message
Validity: If the sender is correct and broadcasts m then all
correct processes deliver m
Agreement: If a correct process delivers m then all correct
processes deliver m
Integrity: Every correct process delivers at most one
message, and if it delivers m ( and m ‘sender faulty’) then
the sender must have broadcasted m
TRB is impossible in asynchronous
systems
Can use TRB to solve consensus
If a process receives ‘sender faulty’ it decides
on 0
Else it decides on the value of the message
received
Faults in a distributed system
Crash: Processor halts, does not perform any
other action and does not recover
Crash+Link: Either processor crashes or the
link fails and remains inactive. The network
may get partitioned
Omission: Process sends or receives only a
proper subset of messages required for
correct operation
Byzantine: Process can exhibit arbitrary
behavior
Consensus in synchronous systems
There is an upper bound on the on the
message delay and the durations of actions
performed by the processes
Consensus under crash failures
Consensus under Byzantine faults
Consensus under crash failures
Requirements :
Agreement: Non faulty processes cannot decide
on different values
Validity: If all processes propose the same value,
v, then the decided value should be v
Termination: A non-faulty process decides in a
finite time
Algorithm
f denotes the maximum number of failures
Each process maintains V the set of values
proposed by other processes (initially it
contains only its own value)
In every round a process:
Sends to all other processes the values from V
that it has not sent before
After f+1 rounds each process decides on the
minimum value in V
Algorithm
Proof: Agreement
If value x is in Vi at correct process i then
belongs to the V of all correct processes
If x was added to Vi in round k<f+1, all correct
process will receive that value in round k+1
If x was added to Vi in the last round (f+1)
then there exists a chain of f+1 processes
that have x in their V. At least one of them is
non-faulty and will broadcast the value to
other correct processes
Complexity
Message complexity:
O((f+1)N2)
If each value needs b bits then the total bits
communicated per round is O(bN3)
Time:
Needs f+1 rounds
Consensus under Byzantine faults
Story:
N Byzantine generals out to repel an attack by a
Turkish Sultan
Each general has a preference – attack or retreat
Coordinated attack or retreat by loyal generals
necessary for victory
Treacherous Byzantine generals could conspire
together and send conflicting messages to
mislead loyal generals
Byzantine General Agreement (BGA)
Reliable messages
Possible to show that no protocol can tolerate
f failures if N · 3f
Lets assume N > 4f
BGA Algorithm
Takes f+1 rounds
Rotating coordinator processes (kings)
Pi is the king in round i
Phase 1:
Phase 2:
Exchange V with other processes
Based on V decide myvalue (majority value)
Receive value from king- kingvalue
If V has more than N/2 + f copies of myvalue then
V[i]=myvalue else V[i]= kingvalue
After f+1 rounds decide on V[i]
BGA
Algorithm
Informal proof argument
If correct processes agree on a value at the beginning of a round
they continue to do so at the end
N>4f
N-N/2 > 2f
N-f > N/2 +f
Each process will receive > N/2+f identical messages
At least one non-faulty process becomes the king (f+1 rounds)
In the correct round if any process chooses myvalue then it
received more than N/2+f myvalue messages)
Therefore king received more than N/2 myvalue messages, i.e.,
kingvalue = myvalue
Knowledge
Knowledge about the system can be
increased by communicating with other
processes
Can use notion of knowledge to prove
fundamental results, e.g. Agreement is
impossible in asynchronous unreliable
systems
Notations and definitions
Ki(b) : process i in group G of processors
knows b
Someone knows b:
Everyone knows b:
Everyone knows E(b): E(E(b))
Ek(b) : k ¸ 0
E0(b) = b and Ek+1(b) = E(Ek(b))
Notations and definitions
Common knowledge C(b):
Hence for any k
C(b) )Ek(b)
Application: Two generals problem
The situation:
Enemy camped in valley
Two generals hills separated by enemy
Communication by messengers who have to pass through
enemy territory … may be delayed or caught
Generals need to agree whether to attack or retreat
Protocol which always solves problem impossible
Can we design a protocol that can lead to
agreement in some run?
Application: Two generals problem
Solution: Don’t start a war if your enemy controls the
valley
Agreement not possible
Let r be the run corresponding to the least number
of messages that lead to common knowledge
Let m be the last message, say it was sent from P
to Q
Since channel is unreliable P does not know if m
was received, hence P can assert C(b) before m
was sent
Contradiction – r is the minimal run