Non-Inertial Frames
advertisement

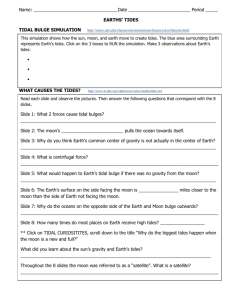
Physics 430: Lecture 20 Non-Inertial Frames Dale E. Gary NJIT Physics Department 9.1 Acceleration without Rotation It is sometimes useful to work in non-inertial frames, but in order to do that we have to make some changes to the equations we developed for inertial frames up to now. We will call our inertial frame So, and consider a second, non-inertial frame S that, by definition, is undergoing some acceleration. To start, let’s consider our frame S to be accelerating without rotation, at some acceleration A, which need not be constant. We could consider So to be the ground, for example, and S to be a railroad car moving relative to the ground (we are ignoring any non-inertial motions of the Earth for the moment). . Now assume someone on the car is playing catch with We will write A V a ball of mass m. Relative to the inertial frame So, of course, you know that the equation of motion for the ball is: mro F, where ro is the position of the ball relative to So, and F is the net force on the ball. F is the vector sum of all forces, e.g. gravity, the passenger’s hand on the ball, air resistance, etc. November 16, 2010 Acceleration without Rotation-2 In the non-inertial frame (at least for non-relativistic mechanics), the ball’s position is r, and its velocity is, by addition of velocities, ro r V. Differentiating and rearranging, we have r ro - A, or mr F - mA. Notice that this looks like Newton’s 2nd Law, except there is a new force -mA that appears due to the acceleration of the frame S relative to So. We will find in general that we can continue to use Newton’s Law for a noninertial frame, so long as we add an extra force-like term, called the inertial force. It can be considered a “fictitious” force in the sense that it disappears in an inertial frame (to be replaced by a true force of the same magnitude). E.g., the true centripetal force in an inertial frame becomes the “fictitious” centrifugal force in the non-inertial frame. Rather than use the misleading term “fictitious,” we will call it an inertial force. November 16, 2010 Example 9.1: A Pendulum in an Accelerating Car Statement of Problem: L A f Consider a simple pendulum (mass m and length L) mounted inside a railroad car that is accelerating to the right with constant acceleration A a shown. Find the angle feq at which the pendulum will remain at rest relative to the accelerating car, and find the frequency of small oscillations about this equilibrium angle. Solution: This time we will use Newtonian mechanics and think about the forces on the plumb bob. There are two forces, mg down and the tension force T, i.e. F = T + mg. In the accelerating frame, as we saw, we need to write: mr T mg - mA T m(g - A) T mg eff , geff f g -A where geff = g – A is a vector quantity that can be considered an effective gravity force. (This is why you feel heavier when taking off in an airplane, for example.) Thus, the equation of motion is just like for a normal pendulum so long as we replace g with geff. If the pendulum remains at rest, then r 0. The equil. angle is feq arctan(- A / g ). November 16, 2010 Example 9.1, cont’d Solution, cont’d: As you know, the frequency of oscillation of a pendulum is g / L. f A Again, we just replace g with geff g 2 A2 , L g 2 A2 . L You have done this problem using Lagrangian mechanics in the frame of the ground (Prob. 7.30), and you may have found it to be considerably more difficult that way. Working in the accelerating frame can be much easier, but recall that we cannot use Lagrangian mechanics directly in a non-inertial frame. November 16, 2010 9.2 The Tides What causes the tides? You may know that it has something to do with the Sun and Moon, and in fact, both have a contribution. To simplify matters, however, we can consider only the effect of the Moon and ignore the Sun. You may think it plausible that the Moon attracts the water on the side nearest the Moon, so that the situation is like this: However, it is observed that the tides occur twice a day, not once, and in fact the true situation is like this: You can think of the ocean bulge (here grossly exaggerated) as being fixed while the Earth rotates under it. How can we understand the bulge in the direction AWAY from the Moon? November 16, 2010 The Tides-2 Basically, what causes the tides is the gradient of the Moon’s gravity across the finite size of Earth. Let’s make this quantitative. The force on any mass element m near the Earth’s surface (say a drop of water) is its weight mg + any buoyant (or other) force Fng + the gravitational pull of the Moon GM m ˆ d. 2 d But the acceleration of the Earth (considered as a point mass at the center of the Earth) is: GM A - 2 dˆ o . do so that mr F - mA dˆ o dˆ mg - GM m 2 Fng GM m 2 . d do Or, if we combine the two terms involving M we identify the tidal force dˆ dˆ o Ftid -GM m 2 - 2 . d d o November 16, 2010 Magnitude of the Tides The figure below may make this more clear. It shows the forces on various parts of the Earth due to the Moon, and then again relative to the center of the Earth. dˆ dˆ o Ftid -GM m 2 - 2 . d d o Gradient of force To find the magnitude of the height difference between high and low tides, notice that the surface of the ocean has to be an equipotential surface—a surface of constant potential energy. You can see the truth of this last statement by considering the three forces acting on a drop of water (gravity, pressure, and tidal [Moon]). No liquid can exert shearing forces, so the pressure force must be normal to the surface of the ocean. Another way to say this is that any non-normal pressure force will push sideways on the drop until it vanishes. Since the total force is zero (the drop is in equilibrium) it follows that mg + Ftid must be normal to the surface. November 16, 2010 Potential Due to Tides Since both mg and Ftid are conservative (both gravity forces), we can write them as the gradient of a potential energy: mg -U eg and Ftid -U tid . where Ueg is the potential due to Earth gravity and Utid is that due to tidal forces. Q dˆ dˆ o By inspection of Ftid -GM m 2 - 2 , the latter is do r d P 1 x do U tid -GM m 2 d do Referring to the figure at right, since U = Ueg + Utid has to be constant on the surface, U ( P ) U (Q ), or U eg ( P) - U eg (Q) U tid (Q) - U tid ( P). But U eg ( P) - U eg (Q) mgh. Here h is the height difference between P and Q. To determine the quantity U tid (Q) - U tid ( P), we just evaluate Utid at P and Q. GM m GM m Re2 Re2 U tid (Q) 1 - 2 , and U tid ( P) 1 2 . d o 2d o do do November 16, 2010 Magnitude of the Tides-2 Putting all of this together, we have GM m 3Re2 mgh . do 2do2 2 Finally, since g GM e / Re , we have 3 M Re4 h . 2 M e do3 Q P r do Putting in numbers (Mmoon = 7.35x1022 kg, Me = 5.98x1024 kg, Re = 6.37x106 m, and do = 3.84x108 m), we find the height of the tides due to the Moon alone: h 54 cm [Moon alone] You can easily use this same expression, substituting values for the Sun, to find h 25 cm [Sun alone] When the Sun and Moon align, you get spring tides (this term has nothing to do with the season), and the two add to give h = 54 + 25 = 79 cm. When the Sun and Moon are at right angles, you get neap tides and the two subtract to give h = 54 – 25 = 29 cm. These same tidal forces act elsewhere in the solar system, e.g. Io. November 16, 2010 9.3 Angular Velocity Vector We are now going to discuss accelerating frames where the non-inertial frame is rotating (relative to the inertial frames). Before we can discuss these, we must introduce some concepts and notation for handling rotation. Many rotation problems involve axes fixed in a rigid body (e.g. the rotation of the Earth about its spin axis). We will see several other examples in Chapter 10. We can cast the problem into one in which the rotation is about a fixed axis by considering either a real fixed axis (i.e. a pendulum rotating about its fixed pivot, or a wheel about its axle) or for other bodies like a spinning baseball we simply switch to its CM frame. Euler’s theorem, which we will state without proof, is that the most general motion of any body relative to a fixed point O is a rotation about some axis through O. (See Goldstein, Poole & Safko for a proof.) To specify this rotation about a given point O, we only have to give the direction of the axis and the rate of rotation, or angular velocity . Because this has a magnitude and direction, it is an obvious choice to write this rotation vector as , the angular velocity vector. It points in the right-hand rule sense. November 16, 2010 A Useful Relation It is important to realize that need not be constant. In the case of a wheel whose rotation is accelerating, the magnitude changes with time. In the case of a wobbling top, the direction changes with time. In general (t). The time rate of change of this is the angular acceleration (which need not be in the same direction as ). r = r sinq We also wish to point out a very useful relation v ω r. v ω r. P You can see how this arises from the figure at right. q r There is, in fact, a corresponding relation for ANY vector in a rotating frame, which we will be using soon. If e is a unit vector fixed in a rotating body, then its rate of change O as seen from the non-rotating frame is de ω e. dt Note that one can add angular velocities just like linear velocities. If body 3 is rotating at angular velocity 32 relative to frame 2, and frame 2 is rotating at angular velocity 21 relative to frame 1, then body 3 is rotating relative to frame 1 at angular velocity ω31 ω32 ω21 November 16, 2010