Locating content: MPEG-7 - Electrical and Computer Engineering

IEEE International Conference on Consumer Electronics
Los Angeles, CA, June 2001
MPEG-7 Visual Descriptors
B. S. Manjunath
University of California,
Santa Barbara, USA manj@ece.ucsb.edu
Acknowledgements
Prof. P. Salembier (for permitting me to use some of his slides fr our tutorial at ICIP’2000).
Editors of the MPEG-7 XM and WD.
Dr. L. Cieplensky, Mitsubishi Electric
Dr. A. Divakaran, Mitsubishi
Dr. S. Jeannin, Philips research lab
Prof. W.Y. Kim, Hanyang University
Dr. M. Bober, Mitsubishi Electric
Dr. H. J. Kim, LG Electronics
Dr. S. Park, ETRI
What you may (may not) expect..
Overview of the visual descriptors
Their capabilities and limitations
Some application examples
Pointers to publicly available documents
Do not expect
Programming and implementation details – these are available in the MPEG-7 eXperimental Model (XM) document.
Binary bit stream syntax – see the MPEG-7 Committee
Draft(s).
Audio-Visual Content Description and the MPEG-7 Standard
Objective, goals, requirements and applications
Basic component of the MPEG-7 standard
Description Definition Language
Description Schemes
A/V Descriptors
Low level Visual Information
Description
Color
Shape
Texture
Motion
Face
©Salembier
Motivation
The multimedia context:
More information is in digital form and is on-line.
AV content covers: still pictures, audio, speech, video, graphics, 3D models, etc.
AV content is available at all bitrates and on all networks.
Increasing number of multimedia applications, services.
Necessity of describing content:
Increasing amount of information.
More needs to have “information about the content”.
Difficult to manage (find, select, filter, organize, etc) content.
User: human or computational systems.
©Salembier
MPEG Standards
MPEG-1 : Storage of moving picture and audio on storage media (CD-ROM) 11 / 1992
MPEG-2 : Digital television 11 / 1994
MPEG-4 : Coding of natural and synthetic media objects for multimedia applications v1: 09 / 1998 v2: 11 / 1999
MPEG-7 : Multimedia content description for AV material
08 / 2001
MPEG-21 : Digital audiovisual framework: Integration of multimedia technologies (identification, copyright, protection, etc.) 11 / 2001
©Salembier
Objective of MPEG-7
Standardize content-based description for various types of audiovisual information
Enable fast and efficient content searching, filtering and identification
Describe several aspects of the content (low-level features, structure, semantic, models, collections, creation, etc.)
Address a large range of applications
(
user preferences)
Types of audiovisual information:
Audio, speech
Moving video, still pictures, graphics, 3D models
Information on how objects are combined in scenes
Descriptions independent of the data support
Existing solutions for textual content or description
©Salembier
Type of applications
Pull Applications:
Example:
“Search and Browsing”
Internet search engines and databases
Advantage: Queries based on standardized descriptions
Push Applications: “Filtering”
Example:
Advantage:
Broadcast video, Interactive television
Intelligent agents filter on the basis of standardized descriptions
Universal Multimedia Access:
Adapt delivery to network and terminal characteristics (QoS)
Specialized Professional and Control Applications
Example of application areas
©Salembier
Storage and retrieval of audiovisual databases (image, film, radio archives)
Broadcast media selection (radio, TV programs)
Surveillance(traffic control, surface transportation, production chains)
E-commerce and Tele-shopping (searching for clothes / patterns)
Remote sensing(cartography, ecology, natural resources management)
Entertainment (searching for a game, for a karaoke)
Cultural services (museums, art galleries)
Journalism (searching for events, persons)
Personalized news service on Internet (push media filtering)
Intelligent multimedia presentations
Educational applications
Bio-medical applications
©Salembier
Example of queries
Text:
Find AV material with the concepts described by the text
Semantic:
Find AV material corresponding to the specified semantic
Image:
Find an image with a similar characteristic (global or local)
Music:
Play a few notes and search for corresponding musical pieces
Motion:
Find video with specific object motion trajectories
Relation content / description
©Salembier
Description may be separated from the content
AV material
Description
AV material AV material
AV material
Description may be multiplexed with the content
AV Desc AV Desc AV Desc
©Salembier
Type of description
Information about the content: recording date & conditions, title, author, copyright, coding format, classification, etc.
Information present in the content: Combination of low level and high level descriptors
High level description:
Efficient and powerful
Lack of flexibility
Low level description
Generic and flexible
Intelligent / efficient search engine
Efficiency
Indexing
Feature extrac
High level
Recognition process
Search
Retrieval
Low level
Recognition process
No restriction on the search
Why do we need a standard ?
©Salembier
Having a standard will ease the task of fast and efficient identification of content that is of interest to the user by
allowing the same described content to be accessed by more search engines and filters
allowing the same search engine and filters to identify described content from more sources
©Salembier
Scope of MPEG-7
Description generation
Description
Description consumption
Research and future competition
Scope of MPEG-7
The description generation
Feature extraction, Indexing process, Annotation &Authoring tools,...) consumption
Search engine, Filtering tool, Retrieval process, Browsing device, ...) are non normative parts of MPEG-7
The goal is to define the minimum that enables interoperability
MPEG-7: The Workplan
1996
Competition:
• Individual work
• Definition of the scope and requ
1998 1999
Collaboration:
• Common work
• Core experiments
• eXperimentation
Model
• Requirements
2000 2001
©Salembier
Call for proposals Working draft Committee draft
Final committee draft
International standard
Draft international standard
©Salembier
Information Flow
Feature extraction
Manual / automatic
AV Description
Decoding
(for transmission)
Storage
Search / query
User & computational systems
Pull
Browse
Filter
Conf.
points
Transmission
Encoding
(for transmission)
Push
The content and its description may also be multiplexed
Parts of the MPEG-7 Standard
ISO / IEC 15938 - 1: Systems
ISO / IEC 15938 - 2: Description Definition Language
ISO / IEC 15938 - 3: Visual
ISO / IEC 15938 - 4: Audio
ISO / IEC 15938 - 5: Multimedia Description Schemes
ISO / IEC 15938 - 6: Reference Software
Visual Descriptors
Visual Descriptors
Color Texture Shape Motion
1. Histogram
• Scalable Color
• Color Structure
• GOF/GOP
2. Dominant Color
3. Color Layout
• Texture Browsing
• Homogeneous texture
• Edge Histogram
• Contour Shape
• Region Shape
•
• Camera motion
Motion Trajectory
• Parametric motion
• Motion Activity
Color Datasets and Evaluation
Criteria
Color: about 5400 color images and 50 queries.
See MPEG document M5060 from Melbourne,
October 1999.
Texture: various data sets – Brodatz texture, aerial pictures, Corel photos.
Performance evaluation
Let the number of ground truth images for a query q be NG(q)
Compute NR(q), number of found items in first K(q) retrievals, where
-
K(q)=min(4*NG(q), 2*GTM)
Where GTM is max{NG(q)} for all q’s of a data set.
Compute MR(q)=NG(q)-NR(q), number of missed items
Compute from the ranks Rank ( k ) of the found items counting the rank of the first retrieved item as one.
A Rank of ( 1.25K(q) ) is assigned to each of the ground truth images which are not in the first K(q) retrievals.
Compute the normalized modified retrieval rank as follows
(next slide). Note that the NMRR ( q ) will always be in the range of
[0.0,1.0].
Average Retrieval Rate (AVR) and
ANMRR
Compute AVR(q) for query q as follows:
AVR ( q )
NG k
(
1 q )
Rank ( k )
NG ( q )
Compute the modified retrieval rank as follows:
( ) = ( ) 0.5(1 +
Normalized MRR, NMRR = MRR(q)/Norm(q)
Where Norm(q)=1.25*K –0.5 – 0.5*NG(q)
ANMRR
1
Q q
Q
1
NMRR ( q )
Color Descriptors
Color descriptors
Dominant Color Scalable Color
- HSV space
Group of frames/pictures histogram color structure
- HMMD space
Color Layout
- YCbCr space
Color Spaces
- YCrCb
- monochrome
(Y only)
- RGB
- HSV
- HMMD
Color spaces
The Color Space Descriptor allows a selection of a color space to be used in the description, the Color
Quantization Descriptor specifies the partitioning of the given color space into discrete bins. These two descriptors are rather to be used in the context of other descriptors, not standalone.
RGB
YCrCb color layout
HSV scalable color
HMMD color structure
Arbitrary 3x3 color transformation matrix
RGB color space
HSV color space
RGB to YCrCb
Y = 0.299*R + 0.587*G + 0.114*B
Cb = -0.169*R - 0.331*G + 0.500*B
Cr = 0.500*R - 0.419*G - 0.081*B
RGB to HSV
Max = max(R, G, B); Min = min( R, G, B);
Value = max(R, G, B); if( Max == 0 ) then
Saturation = 0; else
Saturation = (Max-Min)/Max; if( Max == Min ) Hue is undefined (achromatic color); otherwise: if( Max == R && G > B ) Hue = 60*(G-B)/(Max-Min) else if( Max == R && G < B ) Hue = 360 + 60*(G-B)/(Max-Min) else if( G == Max ) Hue = 60*(2.0 + (B-R)/(Max-Min)) else Hue = 60*(4.0 + (R-G)/(Max-Min))
RGB to HMMD
Diff=Max-Min
Sum=(max+min)/2
Hue as defined for the HSV.
HMMD
White
Intensity(sum)
Whiteness(min)
Chroma(Diff)
Pure color
Blackness(max)
Black
HMMD Quantization
Component Subspace
Hue
Sum
2
3
4
0
1
3
4
0
1
2
4
2
8
4
4
12
12
24
Number of quantisation levels for different numbers of histogram bins
184 120 64 32
1
8
1
4
1
4
1
4
12
12
6
4
3
2
8
4
4
4
8
4
4
4
8
2
4
2
Scalable color histogram
This is a color histogram in the HSV space encoded using a Haar transform. The binary representation is scalable in terms of number of bins used and in the number of bits per bin over a wide range of data rates.
Number of bins can range from 16 to 256.
No. coeff
16
32
64
128
256
8
8
16
# bins: H
4
8
2
4
4
# bins: S
2
2
4
4
4
#bins: V
2
2
Scalable color descriptor
t o a)
-
+
+
+ b)
Extraction & matching
HSV space is uniformly quantized into 256 bins (colors);
The bin values are non-uniformly quantized into 4 bits per bin (11 bit integer truncation followed by a 4 bit non-linear quantization). The quantization is described in the normative part.
The 4 bit values are then Haar transformed.
For matching, one can use the Haar transformed coefficient values instead of reconstructing the histogram values.
However, more accurate results can be expected by reconstructing the histogram index values.
Performance evaluation
0,6
0,5
A
N
M
R
R
0,4
0,3
0,2
0,1
16
32
64
128
256
H-Rec
0
0 256 512 768 1024
Number of bits
Results with different numbers of Haar coefficients (16-256) quantized at different numbers of bits. H-Rec signifies retrieval results after reconstruction of histogram from Haar coefficients at full bit resolution.
GoP/GoF descriptor
The Group of Frames/Group of Pictures Descriptor (GoP) extends the SCD application to a collection of images, video segments, or moving regions.
In the GoP descriptor, three different ways of computing the joint color histogram values for the whole series using the individual histograms from items within the collection are identified:
averaging, median filtering, and histogram intersection.
This joint color histogram is then processed as in the SCD using the
Haar transform and encoded.
Color structure
Similar to a histogram, but a 8x8 structuring element is used to compute the bin values.
HMMD color space should be used with this descriptor. The quantization of the HMMD space to
32, 64, 128 and 180 bins is specified.
Color Structure
C4
C5
C6
C7
COLOR BIN
C0
C1
C2
+1
C3 +1
+1
8 x 8 structuring element dist( A , B )
Ack: WD 4.0, July 2000
i h
A
( i )
h
B
( i )
Structuring element: scalability
a
.
b .
Figure 6: Structuring elements for images with different resolutions: (a): 320x240, (b): 640x480
.
Interoperability
The Color-Structure Descriptor can be used in a limited range of Color Quantization settings, such that the total number of bins lies between 32 and 256.
Re-quantization of a Color Structure Descriptor from fine color space quantization to course can be performed in
HMMD color space using the re-quantization method defined in the WD.
The Color-Structure Descriptor is not interoperable with other Color Descriptors.
CSD: Experimental results
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
0 20 40 60 descriptor bit-length
80 100
Dominant color
Best suitable for local (object or region) features
a small number of colors enough to characterize the color information
Before feature extraction, images segmented into regions
Similar to color histogram EXCEPT:
color bins not fixed, depending on quantization in each region
number of bins not fixed, on average only 3 bins per region
To extract feature
quantize to a small number of representing colors in each region
calculate percentages of quantized colors in the region
Descriptor Definition
A given image is described in terms of a set of region labels and the associated color descriptors
Each pixel has a unique region label.
Each region is characterized by a variable bin color histogram
Color feature descriptor for a given region in the image F :
F =
{ { c p v i i i
} , s
}
, ( i = 1, 2, , N ) where c i is the i -th dominant color, p i is its percentage value, and v i is its color variance. The color variance is an optional field. N: total number of quantized colors in the region .
The spatial coherency s is a single number that represents the overall spatial homogeneity of the dominant colors in the image.
Dominant color (contd.)
The number of dominant colors N can vary from image to image and a maximum of 8 dominant colors can be used to represent the region (3 bits).
The percentage values are quantized to 5 bits each.
The color quantization depends on the color space specifications defined for the entire database and need not be specified with each descriptor.
Experiments with 6 bits/color index.
Variance: 3 bits/dominant color.
Spatial coherence: 5 bits.
Similarity Distance Measure
D
2
( F
1
, F
2
)
i
N
1
1 p
1 i
2 j
N 2
1 p
2
2 j
i
N
1
N 2
1 j
1
2 a
1 i , 2 j p
1 i p
2 j a k,l
: similarity coefficient between two colors c k and c l a k , l
1
0
d k , l
/ d max d d k , l k , l
T d
T d d k,l
: Euclidean distance between two color c k and c l d k , l
c k
c l
T d
: maximum distance for two colors to be considered similar, d max
=
T d
,
values 1.0-1.5, T d values 10-20
Equivalent to the quadratic color histogram distance measure
D
2
( F
1
, F
2
)
( F
1
F
2
)
T
A
( F
1
F
2
)
Enhancements
Spatial coherency
Color variance: variance of each of the dominant color.
ANMRR Results for DC
Color
Space
#dominant colors
(average)
Size(bits)
DC
ARR
DC+Variance
ANMRR Size (bits) ARR ANMRR
RGB
CIE-LAB 3
5
3
6
69
130
67
112
0.6368
0.7114
0.7568
0.8083
0.3897
0.3214
0.2784
0.2312
78
148
76
127
0.7163
0.7933
0.8160
0.8951
0.3222
0.2295
0.2350
0.1563
With Spatial Coherence field
2
1
0
5
4
3
# bits for the spatial coherence
ANMRR
Spatial coherence field with dominant colors
0.221
Spatial coherence for each dominant color
0.227
0.246
0.250
0.252
0.197
0.202
0.252 (without spatial coherence value)
Merits
Accurate and compact compared to the traditional color histogram
color bins quantized from each image region VS. fixed
3 bins on average VS. 256 or more
Efficient database indexing and search
NO high-dimensional indexing
complexity of the searching depends
only on the desired degree of the similarity of the matching
not directly on the database size
insertion and deletion of database entries do not cause index structure rebuilding
retrieval results accurate and fast compared to the traditional color histogram
Color Layout Descriptor (CLD)
Spatial distribution of colors for fast browsing and retrieval.
A very compact representation (63 bits).
Uses YCbCr color space.
Partition the image into 8x8 subimages.
Calculate the “dominant color” of each sub-image.
Compute the DCT of this 8x8 matrix of dominant colors.
Quantize the DCT coefficients.
Zig-zag scan of quantized DCT coefficients.
Experimental Results
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
0 20 40 60 descriptor bit-length
80 100
Application to video segment retrieval
Compute the CLD every 0.5 secs.
Subsample and quantize the CLD sequence:
Let the CLD (t) be the CLD at instant t.
Let t=0, i=0. Let CLDV(0)=CLD(0).
STEP 1: t=t+1.
If CLD(t+1) is similar to CLDV(i) then GOTO STEP 1.;
Else i=i+1; CLDV(i)=CLD(t). GOTO STEP 1.
Visual Descriptors
Color Texture Shape Motion
1. Histogram
• Scalable Color
• Color Structure
• GOF/GOP
2. Dominant Color
3. Color Layout
• Texture Browsing
• Homogeneous texture
• Edge Histogram
• Contour Shape
• Region Shape
• Camera motion
• Motion Trajectory
• Parametric motion
• Motion Activity
Texture descriptors
Texture browsing
Homogeneous texture
Edge histogram
Texture Browsing Descriptor
Compact descriptor for texture browsing- requires only 12 bits. The components provide a higher level perceptual characterization of texture that is useful for browsing and clustering.
Feature extraction is simple, involving image convolutions with a set of masks. The filters are based on a 2-D Gabor wavelet decomposition.
Image convolutions can be efficiently implemented in hardware and software.
Proposed Texture Descriptor
[ v v v v v
1 2 3 4 5
0 0 1 1
... ...
M M
]
PBC SRC
PBC: Perceptual Browsing Component, ( v i integers (12 bits total) v
1
1 N v i 1 ,..., 5 ) are non negative provides a confidence measure on the texture regularity v v
2 4
О K give two quantized directions which best capture the regularity v v
5
О S give two quantized scales which best capture the texture regularity
Examples
PBC v v v v v
(6)
Figure 2: Two texture examples: (a) regular pattern, and (b) an unstructured pattern
Some sample textures and corresponding PBC vectors
[1 3 3 1 1] [1 3 3 1 3] [1 4 1 1 1] [1 6 3 1 1] [1 1 5 1 2]
[2 6 2 3 3] [2 2 6 4 1] [2 6 4 1 3] [2 2 4 2 1] [3 1 4 1 4]
[4 1 4 3 3] [4 1 4 4 4] [4 1 4 4 4] [4 2 3 3 2] [4 1 4 3 3]
Similarity Retrieval: Homogeneous
Texture Descriptor
[ v v v v v
5
2
... ...
M
]
PBC
SRC
SRC: Similarity Retrieval Component.
Components are computed by convolving the image with a set of filters tuned to detect image features at different scales and orientations.
denote the normalized first and second moments of these filtered outputs (computed in the frequency domain).
SRC
62 Components x 8 bits/component.
The components represent mean and standard deviation of the energies in each of the filtered outputs.
Matching can be made rotation and scale invariant.
Descriptor computation:
Frequency Layout
Channel (C i
) channel number (i)
4
5 3
6
10
11
12
30
18
16
17
15
24
23
22
21
20
19
14
13
29
28
27
26
25
0
9
8
7
2
1 w q w
G
P s , r
w q
exp
w w s
2
2
2
s
exp
q q r
2
2
q
2 r
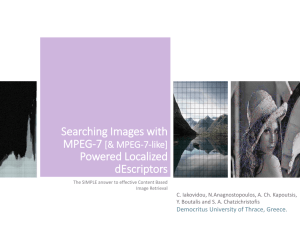
E.g.: Browsing large aerial photographs
40 large aerial photographs (each is 5K x 5K)
Contain about 280,000 tiles and 6,000 regions
Texture based search (using Gabor texture features)
A pattern thesaurus for image indexing
Fast image segmentation scheme
Provide both tile-based and region-based search capabilities.
Integrated into the UCSB Alexandria Digital Library.
Examples of tile-based search
Query Codeword
Applications - Web Image Search
Web image search
Applications - Web Image Search
More details
http://vision.ece.ucsb.edu/
Go to category based image search demo.
Edge histogram
(0,0) (0,1) (0,2) (0,3)
(1,0) (1,1) (1,2) (1,3)
(2,0) (2,1) (2,2) (2,3)
(3,0) (3,1) (3,2) (3,3) sub-image image-block
Edge masks
a) vertical b) horizontal c) 45 degree d) 135 degree e)non-directional
edge edge edge edge edge block_size image-block block_size 0 1
2 3
Local edge histogram
Histogram bins
Local_Edge [0]
Local_Edge [1]
Local_Edge [2]
Local_Edge [3]
Local_Edge [4]
Local_Edge [5]
:
:
:
Local_Edge [74]
Local_Edge [75]
Local_Edge [76]
Local_Edge [77]
Local_Edge [78]
Local_Edge [79]
Semantics
Vertical edge of sub-image at (0,0)
Horizontal edge of sub-image at (0,0)
45degree edge of sub-image at (0,0)
135 degree edge of sub-image at (0,0)
Non-directional edge of sub-image at (0,0)
Vertical edge of sub-image at (0,1)
:
:
:
Non-directional edge of sub-image at (3,2)
Vertical edge of sub-image at (3,3)
Horizontal edge of sub-image at (3,3)
45degree edge of sub-image at (3,3)
135 degree edge of sub-image at (3,3)
Non-directional edge of sub-image at (3,3)
Global histogram
1 2 3 4
7
8
5
6
9
11
13
10
12
0 79 0 4 0 64
local bins global bins semi-global bins
ANMRR results
A N M R R
0.40
0.38
2bits/bin
0.36
0.34
0.32
0.30
0.28
150 200
3bits/bin
250
O nly Local proposed m ethod
300
4bits/bin 5bits/bin
350 400 bits/im age
Local vs Global histograms
2bits/bin 3bits/bin 4bits/bin 5bits/bin with local histogram only with local, semi-global and global histograms
(proposed)
0.396
0.364
0.336
0.296
0.318
0.286
0.325
0.284
Some example results
Visual Descriptors
Color Texture Shape Motion
• Histogram
• Scalable Color
• Color Structure
• GOF/GOP
• Dominant Color
• Color Layout
• Texture Browsing
• Homogeneous texture
• Edge Histogram
• Contour Shape
• Region Shape
• Camera motion
• Motion Trajectory
• Parametric motion
• Motion Activity
Shape Descriptors
Region shape
Contour shape
Types of Shape Descriptor
Contour-based shape descriptor
Region-based shape descriptor
CSS Descriptor
Iteration
1
1000
5000
CSS Space
Iteration t
1/2
20 peaks in CSS image
(0.773, 1)
(0.629, 0.8441)
(0.460, 0.7510)
(0.336, 0.2198)
(0.153, 0.1427)
(0.669, 0.0806)
(0.716, 0.0742)
(0.234, 0.0587)
(0.960, 0.0575)
(0.499, 0.0214)
(0.466, 0.0155)
(0.957, 0.0143)
(0.900, 0.0114)
(0.412, 0.0114)
(0.886, 0.0107)
(0.996, 0.0105)
(0.723, 0.0090)
(0.357, 0.0076)
(0.764, 0.0069)
(0.921, 0.0066)
CSS Descriptor
Model n
0.2
Circular shift
1 t
Query n
Penalty
1
Dissimilarity = Assignment cost + distance t
2/2
CSS image formation
ART Descriptor
Angular Radial Transform
ART-C ART-S
The Definition of ART
ART basis function
Angular function
Radial function
ART coefficients
Rotation Invariance of the ART
A Rotated image
Its ART coefficients
Relationship with the original
Magnitude has rotation invariance
Experimental Dataset & Procedure
1/3
Dataset 1 : 70 classes × 20 variations = 1400 images
CE1-A-1: Scale, CE1-A-2: Rotation, CE1-B: Similarity
Experimental Dataset & Procedure
2/3
Dataset 2 : 1100 marine creatures
Dataset 3 : 200 Bream fish video sequence
CE2-C: motion and non-rigid deformations
Experimental Dataset & Procedure
3/3
Dataset4 : 3000 trademark images
CE2-A-1: Scale, CE2-A-2: Rotation, CE2-A-3: Scale & rotation,
CE2-A-4: Perspective transformation
CE2-B: Similarity
Retrieval Example
1/2
Query results without respect to perspective normalization
Query results with respect to perspective normalization
Retrieval Example
2/2
Query results without respect to perspective normalization
Query results with respect to perspective normalization
Ex: Trademark Registration
Application
U.S.
Patent and
Trademark
Office Local
Trademark Office
World
Intellectual
Property
Organization
Trademark
Examining Officers
Enterprises
Graphic Designers
Visual Descriptors
Color Texture Shape Motion
• Histogram
• Scalable Color
• Color Structure
• GOF/GOP
• Dominant Color
• Color Layout
• Texture Browsing
• Homogeneous texture
• Edge Histogram
• Contour Shape
• Region Shape
• Camera motion
• Motion Trajectory
• Parametric motion
• Motion Activity
Motion Descriptors
Video Segment
Camera Motion
Mosaic
Warping Parameters
Moving Region
Trajectory
Motion Activity Parametric Motion
Camera Motion
Boom up
Track right
Dolly forward
Dolly backward
Boom down
Track left
(a)
Roll
Pan right
Tilt up
Pan left
Tilt down
(b)
(a) Camera track, boom, and dolly motion modes, (b) Camera pan, tilt and roll motion modes.
Motion Activity: motivation
Need to capture “pace” or Intensity of activity
For example, draw distinction between
“High Action” segments such as chase scenes.
“Low Action” segments such as talking heads
Emphasize simple extraction and matching
Use Gross Motion Characteristics thus avoiding object segmentation, tracking etc.
Compressed domain extraction is important
PROPOSED MOTION ACTIVITY
DESCRIPTOR
Attributes of Motion Activity Descriptor
Intensity/Magnitude - 3 bits
Spatial Characteristics - 16 bits
Temporal Characteristics - 30 bits
Directional Characteristics - 3 bits
INTENSITY
Expresses “pace” or Intensity of Action
Uses scale of 1-5, very low - low - medium - high very high
Extracted by suitably quantizing variance of motion vector magnitude
Successfully tested with subjectively constructed
Ground Truth
Spatial Distribution: Using run-lengths to describe moving regions
Raster Scan
Medium Run-Length
Long Run-Length
Short Run-Length
With smaller, widely spaced objects note that there are more long-run lengths and medium run-lengths
SPATIAL DISTRIBUTION
Captures the size and number of moving regions in the shot on a frame by frame basis
Enables distinction between shots with one large region in the middle such as talking heads and shots with several small moving regions such as aerial soccer shots
Thus “sparse” shots have many long runs while
“dense” shots do not have many long runs.
TEMPORAL DISTRIBUTION
Expresses fraction of the duration of each level of activity in the total duration of the shot
Straightforward extension of the intensity of motion activity to the temporal dimension
For instance, since a talking head is typically exclusively low activity it would have zero entries for all levels except one
DIRECTION
Expresses dominant direction if definable as one of a set of eight equally spaced directions
Extracted by using averages of angle (direction) of each motion vector
Useful where there is strong directional motion
APPLICATION TO VIDEO
BROWSING
Extraction of 10 most active segments in a news program
Improve Search by Combining
Intensity and Spatial Attributes
APPLICATIONS
VIDEO BROWSING
RETRIEVAL FROM STORED VIDEO
CONTENT RE-PURPOSING
CONTENT BASED PRESENTATION
SURVEILLANCE
Motion activity: conclusions
COMPACT DESCRIPTOR
EASY TO EXTRACT AND MATCH
EFFECTIVE BY ITSELF
NUMEROUS APPLICATIONS
EFFECTIVE IN COMBINATION WITH OTHER
DESCRIPTORS
DEMO at the end.
Motion Trajectory
First order approximation: v f
f b f a
f a v a t
t b a a
t
t a
second order approximation: f v a
f b f t b
f a v a
t a
t
t a
1
2 a a
( t b
1
2 t a a a
)
( t
t a
)
2
Trajectory (contd.)
Conclusions
All of the visual descriptors in the MPEG-7 working draft have undergone rigorous testing and evaluation.
They represent the state of the art descriptors in image and video retrieval.
For further information, refer to the MPEG documents (see the next slide;)
Ds to DS
Are we ready for this leap of faith?
Further information
Major MPEG-7 documents are public:
MPEG Home page: http://www.cselt.it/mpeg/
Public documents: http://www.cselt.it/mpeg/working_documents.htm
Also check: http://www.mpeg-7.com
Special issues of journals:
Signal Processing : Image Communications, Vol. 16(1-2), Sept. 2000: http://www.elsevier.com/locate/image
IEEE Trans. on Circuits and Systems on Video Technology
(June 2001)
IEEE Trans. Image Processing (Jan 2000 special issue on content based retrieval.)
IBM MPEG-7 Visual Annotation Tool:
http://www.alphaworks.ibm.com/tech/mpeg-7
Book on MPEG-7: to be published later this year (Manjunath, Salembier and
Sikora, Wiley International, 2001.)