Bergamo Lecture 2 - Suspension Systems
advertisement

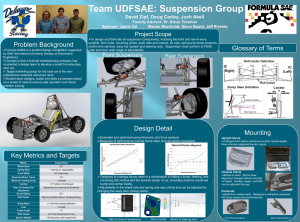
Bergamo University Italy 12th-14th June 2012 Lecture 2- Suspension Systems Professor Mike Blundell Phd, MSc, BSc (Hons), FIMechE, CEng Contents • • • • Suspension Design Process Suspension Types Modelling Suspension Systems Measurements and Simulated Outputs Suspension Design Process Activities Wheel Load Variation Body Isolation Handling Load Control Compliant Wheel Plane Control Kinematics Wheel Plane Control Compliant Loading Environment Investigation Design Strategies Set Design Targets Verify Proposed Designs Wheel load variation - A classic case of static indeterminacy Front wheel drive hatchback cornering pose 3 Body Isolation –Ride Model • Proving Ground or Shaker Rig • Isolation and Comfort • Loss of Tyre/Ground Contact 4 Body Isolation – A Classical Quarter Vehicle Ride Model Vehicle Body or Sprung Mass Suspension Spring and Damper Z X z m Body Response k c zg Ground Input Time (s) • Predict Sprung Mass (Body) and Unsprung Mass (Wheel) Natural Frequencies • Transmissibility 5 Handling Load Control O1 X1 GRF Y1 M2z Izz ω 2z V ω ) F2y m2 ( V 2y 2x 2z • The simplest possible representation of a vehicle manoeuvring in the ground plane (bicycle model) • Weight transfer • Tyre lateral force characteristics as a function of tyre load 6 Handling Load Control (Continued) Front axle side force Rear axle side force • Side forces calculated for a 0.1 rads/s ramped input to 0.01 rads beginning at 0.3s 7 Graphical Representation of Front Suspension Configurations in ADAMS/Chassis Hotchkiss SLA (Torsion Bar) McPherson Strut SLA (Perch) Provided courtesy of MSC.Software SLA (Coil) Twin I-Beam 8 Graphical Representation of Rear Suspension Configurations in ADAMS/Chassis Central Link Quardalink (Strut) 4 Link Watts Semi Trailing Arm Provided courtesy of MSC.Software 4 Link Panhard Twist Beam 9 Double Wishbone Suspension System Upper Bushes (Mounts) Upper Wishbone (Control Arm) Upper Ball Joint (Bushes on Rear) Spring Damper Wheel Knuckle (Stub Axle) (Kingpin) Road Wheel Lower Bushes (Mounts) Lower Wishbone (Control Arm) Connection to Rack (Body on Rear) Track Rod (Tie Rod on Rear) Lower Ball Joint (Bushes on Rear) Track Rod End 10 McPherson Strut Suspension System Upper Mount Spring Damper Wheel Knuckle (Stub Axle) (Kingpin) Lower Bushes (Mounts) Road Wheel Lower Wishbone (Control Arm) Lower Ball Joint Connection to Rack Track Rod Track Rod End 11 Double Wishbone Suspension Modelled with Bushes Modelled with Bushes Modelled with Joints Bushes Spherical Bushes Revolute Revolute Revolute Spherical Spherical Motion In-Plane Motion Universal In-Plane Spherical Motion Revolute Spherical Motion Universal Spherical Translational Translational 12 Coventry University Formula Student Car Bell Crank Push Rod Universal Revolute Spring Damper Spherical Body Mount Modelling of push rod and bell crank mechanism in student race car 13 Suspension Analysis Data Requirements Kinematic or Quasi-static vertical rebound to bump analysis Co-ordinates of suspension linkage connections Bush stiffnesses (If this effects the movement) Spring stiffness ( If suspension wheel rate is to be calculated) Static or Quasi-static durability analysis Co-ordinates of suspension linkage connections Bush stiffnesses Spring stiffness Bump and rebound stops Component flexibility (some suspensions) Dynamic durability or vibration analysis Co-ordinates of suspension linkage connections Mass and inertial properties Bush stiffnesses Bush damping coefficients Spring stiffness Damper properties Bump and rebound stops Component flexibility (some suspensions) Use of Virtual Test Rig to Analyse a Half Vehicle Suspension Model Provided courtesy of MSC.Software Superimposed animation frames giving visual indication of wheel envelope 15 Input of Vertical Motion at the Wheel Centre I In-Plane J Motion 100 Bump Movement (mm) -100 Bump 0.25 0.5 0.75 1.0 Time (s) Rebound 16 Geometric and Instant Steer Axes of a Suspension System Geometric Steer Axis Instant Steer Axis 17 Bump Movement, Wheel Recession and Half Track Change Wheel Change Marker (WC) BM Fixed Ground Marker (FG) HTC z y BM = DZ(WC,FG) HTC = DY(WC,FG) WR = DX(WC,FG) WC FG z WR x 18 Half Track Change (HTC) A measure of how much the contact patch moves in and out relative to the vehicle body at bump movement Influence in Vehicle Dynamics •Full Track Change effect •Beneficial on the outside wheel •Limits of bodywork Double Wishbone BM = DZ(WC,FG) HTC = DY(WC,FG) Mc Pherson Wheel Recession (WR) A measure of fore-aft movement as the wheel moves between Bump and Rebound Influence in Vehicle Dynamics •Ride Comfort •Increased component durability Double Wishbone WR= DX (WC, FG) Mc Pherson Calculation of Camber Angle and Steer Angle g g SA z g = (180/p) ATAN (DZ(WC,SA)/DY(SA,WC)) d x WC y d d =(180/p) ATAN (DX(WC,SA)/DY(SA,WC)) 21 SA Camber angle (g) As the vehicle rolls it’s needed to attempt and keep the tyre flat on the road and avoid opposite camber thrust the tyres running on their edges 0% Camber Rollover compensation γ = (180/π) ATAN (DY(WC,SA)/DZ(SA,WC)) Double Wishbone Mc Pherson 100% Camber Rollover compensation Bump (Roll) Steer (δ) As the suspension moves between bump and rebound small amounts of steer (toe) change may be introduced due to suspension geometry. It can be desirable to add to an understeer characteristic δ = (180/π) ATAN (DY(WC,WB)/DX(WC,WB)) Gradient Shopping cars Sport cars 4-5o/m >10o/m Double Wishbone Mc Pherson Calculation of Castor Angle and Suspension Trail f = (180/p) ATAN (DX(UB,LB)/DZ(UB,LB)) TR = DX(WB,LB) + DZ(LB,WB) * DX(UB,LB) / DZ(UB,LB) f Upper Ball Joint Marker (UB) Lower Ball Joint Marker (LB) z x Wheel Base Marker (WB) TR Intersection of Steering Axis with Ground 24 Castor Angle (φ) and Suspension Trail (TR) Castor angle adds to the self-centering with the Pneumatic Trail Suspension (Mechanical) Trail Typical Value 35-50mm Castor Angle change Double Wishbone Mc Pherson φ = (180/π) ATAN(DX(UB,LB)/DZ(UB,LB)) TR = DX (WB, LB) +DZ (LB, WB)*DX (UB, LB)/DZ (UB, LB) Calculation of Steering Axis Inclination and Ground Level Offset q = (180/p) ATAN (DY(LB,UB)/DZ(UB,LB)) GO = DY(WB,LB) - DZ(LB,WB) * (DY(LB,UB) / DZ(UB,LB)) q UB z y GO Wheel Base Marker (WB) Intersection of Steering Axis with Ground 26 Steering Axis Inclination (θ) and Ground level Offset (GO) GO offset minimises scrubbing of the tyre during steering when stationary. Alternative method of tweaking GO is by using rims with offset. Steering Axis Inclination (θ) and Ground level Offset (GO) (continued) When braking on split mu surface vehicle tends to yaw due to higher braking forces on the high mu side. Using negative ground level offset can compensate the effect. θ = (180/π) ATAN(DY(LB,UB)/DZ(UB,LB)) GO =DY (WB, LB)-DZ (LB, WB)*(DY (LB, UB)/DZ (UB, LB)) GO typical Value 10mm Double Wishbone Mc Pherson Front right wheel Instant Centre and Roll Centre Positions Double Wishbone Suspension Double Wishbone Suspension Centre Line A Instant Centre B D C Roll Centre z y Roll Centre Height Wheel Base (WB) McPherson Strut Suspension Centre A Line Instant Centre C B Wheel Base (WB) D Roll Centre y z Roll Centre Height 29 Position of Instant Centre Construction Points on Wheel Centre YZ Plane B A WC D Z C X Y 30 Height of Roll Centre (RC) RC is the corresponding point of lateral force application on the vehicle sprung mass and relative to its distance from the Vehicle’s CM is the applied roll torque. Double Wishbone Mc Pherson Calculation of Wheel Rate (Equivalent Spring Acting at the Wheel Centre) Fw VEHICLE BODY kw Fs kw dw ks Equivalent spring acting at the wheel centre A ds dw Fw ls lw 32 Wheel Rate The “equivalent” spring acting between wheel centre and the vehicle body Wheel rate can be set so as to be softer during initial bump and stiffer during increased bump travel for better ride comfort and roll control Double Wishbone Mc Pherson Case Study – Suspension Kinematics 34 Modelling Bushes 35 Modelling Bushes 36 Data Input – Joint, Linear Bush, Non-Linear Bush 37 Comparison of Suspension Outputs 38 Suspension Durability • • • Static Analysis Single Suspension System Model, Range of Load Cases (3G Bump, 2G Rebound, 1G Braking, ….) Dynamic Analysis using Road Load Data Single Suspension System Model, Quarter or Full Vehicle Model Full Virtual Modelling and Analysis for Durability Full Vehicle Model with Transient Dynamics Physical Tyre Model Required Road/ Terrain model (Laser scanned) 39 Suspension Durability Analysis LOADCASE Fx (N) Fy (N) 3G Bump 11180 2G Rebound Fx Longitudina l loads Fz Vertical loads Fy Lateral loads Garrett, T. K., (1953) Automobile dynamic loads some factors applicable to design, Automobile Engineer, February. Fz (N) -7460 0.75G Cornering (Outer Wheel) 4290 5880 0.75G Cornering (Inner Wheel) -1180 1620 1G Braking 5530 5530 0.35G Reverse Braking -2150 3330 Kerb Impact Pothole Braking 9270 15900 4120 12360 Weight Transfer-Braking Hand calculations can be performed To establish loads for braking or cornering cm mAx Z h mg X FRx FFx FRz = FSRz – FB FFz = FSFz + FB a b L FFz = FSFz + FB = FRz = FRFz – FB = +m g b 2L -m g a 2L m Ax h 2L m Ax h 2L FFx = m FFz FFx = m FFz 41 Case Study - Pothole Braking Case • • • • Ramping loads on over 1 second (Quasi-static) Allows animation (visual check) UNI Load path through damper not modelled Unless static equivalent force included REV SPH BUSH SPH CYL BUSH BUSH REV MOTION I marker at wheelbase 12360 N SPH FIX BUSH ZP for marker 3 15900 N Z ZP for marker 1 X Y ZP for marker 2 GRF Typical Results Animation Quarter Vehicle Model Simple starting point Dynamic Analysis Road Bump Strike Tyre stiffness and damping Tyre can lift off Quarter Vehicle Body Part Body connects to Ground by Translational Joint Jack Part 45 Road Profile 10 m/s Z X GRF 1000 y . 1 x 200 200 200 200 200 200 10000 . . . . . . . 2 5 4 3 6 7 Point 1 Distance x (mm) Time x (s) Height y (mm) 0 0 0 2 3 4 5 . 8 150 6 1000 1200 1400 1600 1800 0.10 0.12 0.14 0.16 0.18 0 75 150 150 150 9 7 2000 0.20 75 8 9 2200 12200 0.22 1.22 0 0 46 Animation Quarter Model Results Time = 0 sec Time = 0.14 sec Time = 0.18 sec 48