Object Modeling
advertisement

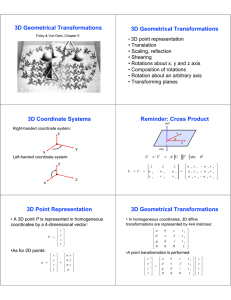
III 3D Transformation Homogeneous Coordinates • The three dimensional point (x, y, z) is represented by the homogeneous coordinate (x, y, z, 1) • In general, the homogeneous coordinate (x, y, z, w) represents the three dimensional point (x/w, y/w, z/w) • The generalized transformation matrix: a d [T ] g l b e i m c f j n p 3 3 3 1 q r s 1 3 1 1 III-1 Scaling • In general, this is done with the equations: xn = s x * x yn = s y * y zn = sz * z • This can also be done with the matrix multiplication: x n s x y 0 n zn 0 w 0 0 sy 0 0 0 sz 0 0 0 x 0 y * 0 z 1 w III-2 • Scaling can be done relative to the object center with a composite transformation • Scaling an object centered at (cx, cy, cz) is done with the matrix multiplication: xn 1 y 0 n zn 0 w 0 0 0 c x s x 1 0 c y 0 * 0 1 cz 0 0 0 1 0 0 sy 0 0 0 sz 0 0 0 1 0 0 * 0 0 1 0 0 0 cx x 1 0 c y y * 0 1 cz z 0 0 1 w III-3 Shearing • Equivalent to pulling faces in opposite directions • III-4 III-5 III-6 III-7 III-8 Rotation • Rotation can be done around any line or vector • Rotations are commonly specified around the x, y, or z axis • A positive angle of rotation results in a counterclockwise movement when looked at from the positive axis direction • The matrix form for rotation – x axis 0 x 1 y 0 cos n zn 0 sin 0 w 0 0 sin cos 0 0 x 0 y * 0 z 1 w III-9 – y axis x n cos y 0 zn sin w 0 0 sin 1 0 0 cos 0 0 0 x 0 y * 0 z 1 w – z axis xn cos y sin n z 0 w 0 sin cos 0 0 0 0 x 0 0 y * 1 0 z 0 1 w III-10 III-11 III-12 III-13 Reflection • Reflection through the xy-plane: • Reflection through the yz-plane: • Reflection through the xz-plane: III-14 III-15 III-16 Translations • The amount of the translation is added to or subtracted from the x, y, and z coordinates • In general, this is done with the equations: x n = x + tx yn = y + ty z n = z + tz • This can also be done with the matrix multiplication: xn 1 y 0 n zn 0 w 0 0 0 tx x 1 0 t y y * 0 1 tz z 0 0 1 w III-17 III-18 III-19 III-20 III-21 III-22 Combining Transformations • Matrices can be multiplied together to accomplish multiple transformations with one matrix • A matrix is built with successive transformations occurring from right to left • A combination matrix is typically built from the identity matrix with each new transformation added by multiplying it on the left of the current combination III-23 Rotation about an Arbitrary Axis in Space • Assume an arbitrary axis in space passing through the point ( x0 , y0 , z 0 ) with direction cosines (c x , c y , c z ) and rotation about this axis by some angle • III-24 • Direction cosines: III-25 • The complete transformation is: III-26 III-27 III-28 III-29 III-30 III-31 Reflection through an Arbitrary Plane • III-32 • The general transformation is: III-33 III-34 III-35 III-36 III-37